一种多无人车编队队形控制及避障重构方法与系统
本发明涉及非电变量控制,特别是涉及一种多无人车编队队形控制及避障重构方法与系统。
背景技术:
1、随着社会的进步,无人驾驶技术迅速发展,但目前的无人驾驶汽车主要以单车智能模式运行,缺少与其他车辆的高效交互,不仅限制了交通效率,还制约了自动驾驶技术的发展。近年来,多无人车编队技术迅速发展,但对于多车编队系统,缺乏队形保持稳定且避障重构灵活的编队控制方法。
2、在多车编队中,各无人车之间的位置误差收敛迅速,以迅速形成并保持目标队形;同时,为充分考虑障碍物环境及编队任务的多样性,各无人车之间的相对位置又应该灵活多变;在编队行驶过程中,多车编队与障碍物及编队内部无人车之间均不应存在碰撞风险,且应该充分考虑无人车的运动能力,避免忽略车辆尺寸及运动特性进行编队控制。但是目前的多车编队控制方法难以同时满足以上要求,基于此,本领域亟需一种能够在充分利用环境中可行域范围和编队内无人车的运动能力的前提下,同时满足多车编队队形保持稳定性和避障重构灵活性的编队控制方法。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种多无人车编队队形控制及避障重构方法与系统。
2、为实现上述目的,本发明提供了如下方案:
3、一种多无人车编队队形控制及避障重构方法,包括:
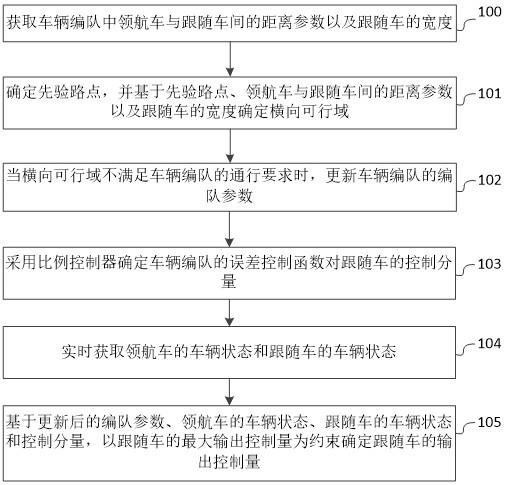
4、获取车辆编队中领航车与跟随车间的距离参数以及跟随车的宽度;
5、确定先验路点,并基于所述先验路点、所述领航车与跟随车间的距离参数以及所述跟随车的宽度确定横向可行域;
6、当所述横向可行域不满足所述车辆编队的通行要求时,更新所述车辆编队的编队参数;
7、采用比例控制器确定所述车辆编队的误差控制函数对跟随车的控制分量;
8、实时获取领航车的车辆状态和跟随车的车辆状态;
9、基于更新后的编队参数、所述领航车的车辆状态、所述跟随车的车辆状态和所述控制分量,以跟随车的最大输出控制量为约束确定跟随车的输出控制量;跟随车的最大输出控制量包括:跟随车的最大车速和跟随车前轮的最大转角。
10、可选地,所述车辆编队的通行要求为:
11、;
12、式中,表示在第个先验路点到领航车一侧车速的垂向距离,表示在第个先验路点到领航车另一侧车速的垂向距离,表示跟随车的宽度,表示冗余宽度,表示领航车后轴中心点一侧的横向可行域,表示领航车后轴中心点另一侧的横向可行域。
13、可选地,在更新所述车辆编队的编队参数后,所述方法还包括:
14、基于更新后的所述编队参数完成车辆编队队形的重构。
15、可选地,基于更新后的编队参数、所述领航车的车辆状态、所述跟随车的车辆状态和所述控制分量,以跟随车的最大输出控制量为约束确定跟随车的输出控制量,具体包括:
16、基于基于更新后的编队参数、所述领航车的车辆状态、所述跟随车的车辆状态和所述控制分量确定跟随车的期望控制量;
17、以跟随车的最大输出控制量为约束,基于所述跟随车的期望控制量确定所述跟随车的输出控制量。
18、可选地,跟随车的期望控制量为:
19、;
20、式中,表示时刻跟随车的期望速度,表示领航车的速度,表示时刻领航车的航向角,表示时刻跟随车的航向角,表示期望角度,表示消除纵向误差的比例控制系数,表示时刻的纵向误差函数,表示时刻跟随车前轮转角,表示时刻的横向误差函数,表示期望距离,表示跟随车的速度,表示消除横向误差的比例控制系数,表示跟随车轴距。
21、可选地,所述跟随车的输出控制量为:
22、;
23、;
24、式中,表示跟随车的最大车速,表示跟随车前轮的最大转角,表示时刻跟随车输出的速度,表示时刻跟随车输出的前轮转角。
25、一种多无人车编队队形控制及避障重构系统,包括:
26、数据采集器,用于采集车辆编队中领航车与跟随车间的距离参数以及跟随车的宽度,并用于实时采集领航车的车辆状态和跟随车的车辆状态;
27、存储器,用于存储计算机程序;
28、处理器,分别与所述数据采集器和所述存储器连接,用于基于所述数据采集器采用的车辆状态,调取并执行所述计算机程序,以实施上述提供的多无人车编队队形控制及避障重构方法。
29、可选地,所述处理器包括:
30、参数获取模块,用于获取车辆编队中领航车与跟随车间的距离参数以及跟随车的宽度;
31、可行域确定模块,用于确定先验路点,并基于所述先验路点、所述领航车与跟随车间的距离参数以及所述跟随车的宽度确定横向可行域;
32、参数更新模块,用于当所述横向可行域不满足所述车辆编队的通行要求时,更新所述车辆编队的编队参数;
33、控制分量确定模块,用于采用比例控制器确定所述车辆编队的误差控制函数对跟随车的控制分量;
34、车辆状态获取模块,用于实时获取领航车的车辆状态和跟随车的车辆状态;
35、控制量输出模块,用于基于更新后的编队参数、所述领航车的车辆状态、所述跟随车的车辆状态和所述控制分量,以跟随车的最大输出控制量为约束确定跟随车的输出控制量;跟随车的最大输出控制量包括:跟随车的最大车速和跟随车前轮的最大转角。
36、可选地,所述存储器为计算机可读存储介质。
37、根据本发明提供的具体实施例,本发明公开了以下技术效果:
38、本发明提供的多无人车编队队形控制及避障重构方法与系统,可仅由领航车实时求解与各跟随车的编队参数,跟随车只负责按编队参数跟踪,不需要路径规划,具有重构求解效率高的特点;并且,通过比例控制器分别建立编队参数和误差函数对跟随车的控制分量,能够实现误差的收敛,使无人车迅速运动至编队参数要求的位置,队形形成迅速且保持精度高;进一步,以跟随车的最大输出控制量为约束进行跟随车输出控制量的确定,能够限制跟随车总控制量,使输出控制量满足车辆运动能力,跟踪过程平滑,不会出现超调的现象。
技术特征:
1.一种多无人车编队队形控制及避障重构方法,其特征在于,包括:
2.根据权利要求1所述的多无人车编队队形控制及避障重构方法,其特征在于,所述车辆编队的通行要求为:
3.根据权利要求1所述的多无人车编队队形控制及避障重构方法,其特征在于,在更新所述车辆编队的编队参数后,所述方法还包括:
4.根据权利要求1所述的多无人车编队队形控制及避障重构方法,其特征在于,基于更新后的编队参数、所述领航车的车辆状态、所述跟随车的车辆状态和所述控制分量,以跟随车的最大输出控制量为约束确定跟随车的输出控制量,具体包括:
5.根据权利要求4所述的多无人车编队队形控制及避障重构方法,其特征在于,跟随车的期望控制量为:
6.根据权利要求5所述的多无人车编队队形控制及避障重构方法,其特征在于,所述跟随车的输出控制量为:
7.一种多无人车编队队形控制及避障重构系统,其特征在于,包括:
8.根据权利要求7所述的多无人车编队队形控制及避障重构系统,其特征在于,所述处理器包括:
9.根据权利要求7所述的多无人车编队队形控制及避障重构系统,其特征在于,所述存储器为计算机可读存储介质。
技术总结
本发明公开一种多无人车编队队形控制及避障重构方法与系统,涉及非电变量控制技术领域。本发明在实施过程中,可仅由领航车实时求解与各跟随车的编队参数,跟随车只负责按编队参数跟踪,不需要路径规划,具有重构求解效率高的特点;并且,通过比例控制器分别建立编队参数和误差函数对跟随车的控制分量,能够实现误差的收敛,使无人车迅速运动至编队参数要求的位置,队形形成迅速且保持精度高;进一步,以跟随车的最大输出控制量为约束进行跟随车输出控制量的确定,能够限制跟随车总控制量,使输出控制量满足车辆运动能力,跟踪过程平滑,不会出现超调的现象。
技术研发人员:龚建伟,陈信燃,臧政,巨志扬,张曦,齐建永,张升
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!