一种角度控制方法、装置、设备及介质与流程
本技术涉及角度控制,特别是涉及一种角度控制方法、装置、设备及介质。
背景技术:
1、在现代制造业中,精确角度控制是一项非常重要的技术,广泛应用于机械加工、自动化生产、机器人控制等领域。
2、传统的角度控制方法主要依赖于机械结构和传感器的组合使用。但是由于机械结构加工误差,以及传感器的特性测量误差和安装误差,精度和稳定性难以得到保证。
3、鉴于上述问题,如何解决由于机械结构加工误差以及传感器测量误差导致的现有的角度控制过程精度不高且稳定性欠佳,是该领域技术人员亟待解决的问题。
技术实现思路
1、本技术的目的是提供一种角度控制方法、装置、设备及介质,以解决由于机械结构加工误差以及传感器测量误差导致的现有的角度控制过程精度不高且稳定性欠佳的问题。
2、为解决上述技术问题,本技术提供一种角度控制方法,应用于三维核心肌群评估与训练系统;其中,所述系统包括光电开关、编码器和控制电路;所述方法包括:
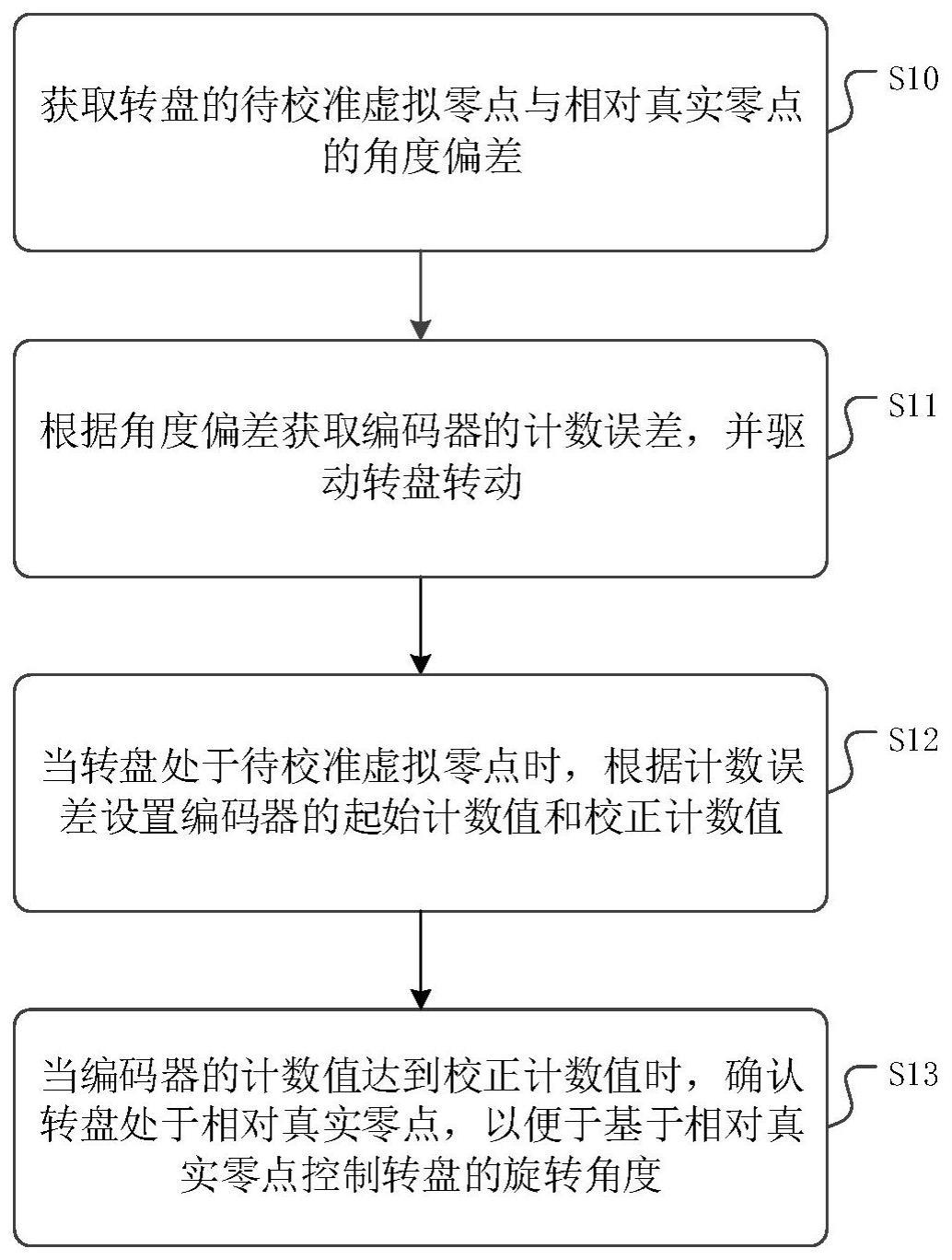
3、获取转盘的待校准虚拟零点与相对真实零点的角度偏差;其中,所述待校准虚拟零点为通过所述光电开关检测获取;所述相对真实零点表征相对于所述待校准虚拟零点的所述转盘的真实零点;
4、根据所述角度偏差获取所述编码器的计数误差,并驱动所述转盘转动;
5、当所述转盘处于所述待校准虚拟零点时,根据所述计数误差设置所述编码器的起始计数值和校正计数值;
6、当所述编码器的计数值达到所述校正计数值时,确认所述转盘处于所述相对真实零点,以便于基于所述相对真实零点控制所述转盘的旋转角度。
7、优选地,所述获取转盘的待校准虚拟零点与相对真实零点的角度偏差包括:
8、获取所述转盘顺时针转动时所述待校准虚拟零点与所述相对真实零点的第一角度偏差;
9、获取所述转盘逆时针转动时所述待校准虚拟零点与所述相对真实零点的第二角度偏差。
10、优选地,所述获取所述转盘顺时针转动时所述待校准虚拟零点与所述相对真实零点的第一角度偏差包括:
11、控制所述转盘旋转至所述相对真实零点逆时针方向的第一预设位置;
12、控制所述转盘顺时针旋转;
13、当通过所述光电开关检测到所述待校准虚拟零点时,停止旋转所述转盘,并通过角度仪获取所述待校准虚拟零点与所述相对真实零点的所述第一角度偏差;
14、对应地,所述获取所述转盘逆时针转动时所述待校准虚拟零点与所述相对真实零点的第二角度偏差包括:
15、控制所述转盘旋转至所述相对真实零点顺时针方向的第二预设位置;
16、控制所述转盘逆时针旋转;
17、当通过所述光电开关检测到所述待校准虚拟零点时,停止旋转所述转盘,并通过所述角度仪获取所述待校准虚拟零点与所述相对真实零点的所述第二角度偏差。
18、优选地,所述根据所述角度偏差获取所述编码器的计数误差包括:
19、获取所述转盘的旋转角度与所述编码器的计数值之间的对应关系值;其中,所述对应关系值表征所述转盘的所述旋转角度发生变化时所述编码器的所述计数值对应发生的变化程度;
20、根据所述对应关系值和所述第一角度偏差获取所述转盘顺时针归零时所述编码器的第一计数误差;
21、根据所述对应关系值和所述第二角度偏差获取所述转盘逆时针归零时所述编码器的第二计数误差。
22、优选地,所述当所述转盘处于所述待校准虚拟零点时,根据所述计数误差设置所述编码器的起始计数值和校正计数值包括:
23、设置所述编码器的所述起始计数值;
24、当所述转盘顺时针转动至所述待校准虚拟零点时,设置所述校正计数值为所述起始计数值与所述第一计数误差的和;
25、当所述转盘逆时针转动至所述待校准虚拟零点时,设置所述校正计数值为所述起始计数值与所述第二计数误差的差。
26、优选地,在所述确认所述转盘处于所述相对真实零点之后,还包括:
27、将所述编码器当前的所述计数值设置为所述起始计数值。
28、优选地,还包括:
29、获取所述转盘待旋转的起始位置的角度值和目标位置的角度值;
30、根据所述起始位置的角度值和所述目标位置的角度值确定所述转盘的旋转方向;
31、根据所述旋转方向设置所述编码器的捕获比较值,以用于当所述编码器的所述计数值达到所述捕获比较值时,确认到达所述目标位置。
32、优选地,当所述起始位置为所述相对真实零点时,所述根据所述起始位置的角度值和所述目标位置的角度值确定所述转盘的旋转方向包括:
33、判断所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值是否大于180°;
34、若是,则确认所述转盘的所述旋转方向为逆时针方向;
35、若否,则确认所述转盘的所述旋转方向为顺时针方向。
36、优选地,所述根据所述旋转方向设置所述编码器的捕获比较值包括:
37、根据所述起始计数值、所述目标位置的角度值和所述对应关系值获取对应所述旋转方向下所述编码器的所述捕获比较值。
38、优选地,当所述起始位置不为所述相对真实零点时,所述根据所述起始位置的角度值和所述目标位置的角度值确定所述转盘的旋转方向包括:
39、判断所述起始位置的角度值是否大于所述目标位置的角度值,并判断所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值是否大于180°;
40、若所述起始位置的角度值大于所述目标位置的角度值,且所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值大于180°,则确认所述转盘的所述旋转方向为顺时针方向;
41、若所述起始位置的角度值大于所述目标位置的角度值,且所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值不大于180°,则确认所述转盘的所述旋转方向为逆时针方向;
42、若所述起始位置的角度值不大于所述目标位置的角度值,且所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值大于180°,则确认所述转盘的所述旋转方向为逆时针方向;
43、若所述起始位置的角度值不大于所述目标位置的角度值,且所述起始位置的角度值和所述目标位置的角度值二者的差值的绝对值不大于180°,则确认所述转盘的所述旋转方向为顺时针方向。
44、优选地,所述根据所述旋转方向设置所述编码器的捕获比较值包括:
45、获取所述起始位置对应的所述编码器的所述计数值;
46、根据所述起始位置对应的所述编码器的所述计数值、所述起始位置的角度值、所述目标位置的角度值和所述对应关系值获取对应所述旋转方向下所述编码器的所述捕获比较值。
47、为解决上述技术问题,本技术还提供一种角度控制装置,应用于三维核心肌群评估与训练系统;其中,所述系统包括光电开关、编码器和控制电路;所述装置包括:
48、第一获取模块,用于获取转盘的待校准虚拟零点与相对真实零点的角度偏差;其中,所述待校准虚拟零点为通过所述光电开关检测获取;所述相对真实零点表征相对于所述待校准虚拟零点的所述转盘的真实零点;
49、第二获取模块,用于根据所述角度偏差获取所述编码器的计数误差,并驱动所述转盘转动;
50、设置模块,用于当所述转盘处于所述待校准虚拟零点时,根据所述计数误差设置所述编码器的起始计数值和校正计数值;
51、确认模块,用于当所述编码器的计数值达到所述校正计数值时,确认所述转盘处于所述相对真实零点,以便于基于所述相对真实零点控制所述转盘的旋转角度。
52、为解决上述技术问题,本技术还提供一种角度控制设备,包括:
53、存储器,用于存储计算机程序;
54、处理器,用于执行所述计算机程序时实现上述的角度控制方法的步骤。
55、为解决上述技术问题,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的角度控制方法的步骤。
56、本技术所提供的角度控制方法,应用于三维核心肌群评估与训练系统;其中,系统包括光电开关、编码器和控制电路;方法具体通过获取转盘的待校准虚拟零点与相对真实零点的角度偏差;其中,待校准虚拟零点为通过光电开关检测获取;相对真实零点表征相对于待校准虚拟零点的转盘的真实零点;根据角度偏差获取编码器的计数误差,并驱动转盘转动;当转盘处于待校准虚拟零点时,根据计数误差设置编码器的起始计数值和校正计数值;当编码器的计数值达到校正计数值时,确认转盘处于相对真实零点,以便于基于相对真实零点控制转盘的旋转角度。由此可知,上述方案基于光电开关和编码器的组合使用,根据系统转盘的待校准虚拟零点与相对真实零点的角度偏差确定编码器的计数误差,进一步确定相对真实零点对应的编码器的校正计数值,使得当转盘旋转至编码器计数值达到校正计数值时,确认转盘达到相对真实零点位置,实现了对转盘角度的零位校准,消除了机械结构加工误差和传感器安装误差,以便于后续精准控制转盘的旋转角度。提高了系统的控制精度、稳定性、可靠性和安全性。
57、此外,本技术还提供了一种角度控制装置、设备及介质,效果同上。
- 还没有人留言评论。精彩留言会获得点赞!