一种用于固定翼无人机无损精确回收和自抗扰控制方法
本发明涉及无人机回收,尤其是涉及一种用于固定翼无人机无损精确回收和自抗扰控制方法。
背景技术:
1、无人机按照结构可分做固定翼无人机、无人直升机和多旋翼无人机三大类。其中,固定翼无人机是军用和多数民用无人机的主流平台,特点是飞行速度快,续航时间长,载重量大,适合远距离连续工作。为了改善固定翼无人机使用的效费比(效率/费用),固定翼无人机由早期的以一次性使用为主的情况(无人靶机),越来越趋向于多次性使用。固定翼无人机回收技术对于提高无人机可靠性和作战灵活性具有重大意义。如美国早期的先锋无人机(撞网回收)虽然在作战中发挥了一定的效能,但由于其在回收中存在不足促使美国采用扫描鹰无人机进行替代。由此可见,固定翼无人机回收时间的长短将直接影响无人机出动效率,从而影响作战效能,尤其是人员编制有限的情况下,更是要求回收工作的便捷。因此,固定翼无人机回收技术成为发展无人机国家十分重视的问题,也是衡量无人机发展成熟度的重要指标。针对固定翼无人机无损精确回收技术,本发明提出了一种用于固定翼无人机无损精确回收的rtk航迹指定和自抗扰控制方法,利用rtk获取无人机航迹,通过无人机与回收框架之间的位置误差调整航迹并利用自抗扰控制方法控制无人机进入回收区域。
技术实现思路
1、本发明的目的是提供一种用于固定翼无人机无损精确回收和自抗扰控制方法,解决了回收精度低、无人机整体结构容易损伤和干扰因素多的问题。
2、为实现上述目的,本发明提供了一种用于固定翼无人机无损精确回收和自抗扰控制方法,包括以下步骤:
3、s1、布置固定翼无人机回收区域及rtk基站;
4、s2、固定翼无人机绕飞并开始用rtk定位得到无人机实时位置;
5、s3、设定固定翼无人机初始航迹;
6、s4、利用自抗扰控制实现无人机沿既定航迹的飞行;
7、s5、调整固定翼无人机航迹,使无人机进入无人机回收区域。
8、优选的,在步骤s1中,固定翼无人机回收区域及rtk基站的布置包括以下步骤:
9、s1.1、依据回收所需的控制精度,在空中布置无人机回收所需的回收框架作为回收区域,无人机框架所在平面法线与竖直方向垂直,无人机的末端控制精度设定为±1.5m,试验用无人机翼展2m,高度0.5m,设置捕获区域水平方向和竖直方向长度分别为5m和3.5m,无人机回收区域顶端高度为10m;
10、s1.2、rtk基站布置在接近回收区域的位置,并且远离其他信号发送设备。
11、优选的,在步骤s2中,固定翼无人机绕飞并开始用rtk定位获取无人机实时位置包括以下步骤:
12、s2.1、固定翼无人机起飞,控制无人机环绕无人机回收区域飞行;
13、s2.2、基站建立与无人机和用户站的无线连接并开始传输测量数据,用户站获取到无人机的实时位置信息。
14、优选的,在步骤s3中,设定固定翼无人机初始航迹包括以下步骤:
15、s3.1、设定无人机航迹点,根据航迹点的连接得到无人机的飞行轨迹,航迹包括自由段、上升段和回收段;
16、s3.2、设定无人机飞行高度,无人机回收段飞行高度高于无人机回收区域的高度。
17、优选的,在步骤s3.1中,自由段为经过无人机回收区域后并且在上升段之前的飞行阶段,上升段为自由段和回收段之间的过渡段,回收段为无人机接近直线轨迹飞往无人机回收区域的飞行阶段。
18、优选的,在步骤s4中,利用自抗扰控制实现无人机沿既定航迹的飞行包括以下三个通道的控制律设计:
19、通道1:俯仰通道
20、俯仰方向二阶控制方程:
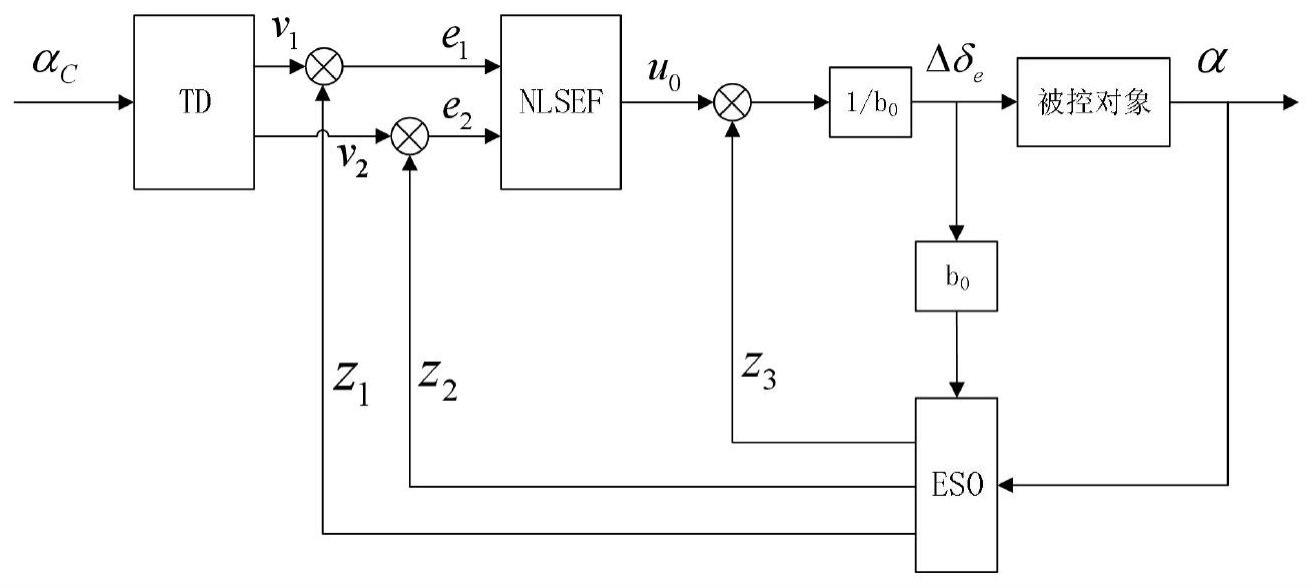
21、二阶自抗扰控制器如图1所示,αc为期望的迎角,即输入信号,v1和v2分别为输入信号的跟踪信号及其微分,z1和z2是状态观测器对系统状态α和的估计,z3是系统综合扰动的估计,且有e1=v1-z1,e2=v2-z2,u0是误差信号的非线性组合;
22、取x1(t)=α(t),x3(t)=fα,得到扩张状态方程为:
23、
24、设计扩张状态观测器:
25、
26、通过非线性状态误差反馈,可以得到误差信号的非线性组合为如下形式:
27、
28、其中kα1和kα2为可调参数,参数aα1、aα2的一般取值范围为0<aα1<1<aα2,
29、再考虑到状态观测器观测到的扰动信号z3,进行扰动补偿后可以得到迎角的控制律,也就是升降舵的控制指令为:
30、
31、通道2:偏航通道
32、偏航方向的二阶控制方程为:
33、与俯仰通道的形式类似,可以设计得到侧滑角的自抗扰控制器为如下形式:
34、侧滑角扩张状态观测器:
35、
36、侧滑角误差信号的非线性组合:
37、
38、扰动补偿后可以得到侧滑角的控制律,也就是方向舵的控制指令:
39、
40、通道3:滚转通道
41、滚转方向的二阶控制方程为:
42、与俯仰通道的形式类似,可以设计得到滚转角的自抗扰控制器为如下形式:
43、滚转角扩张状态观测器:
44、
45、滚转角误差信号的非线性组合:
46、
47、扰动补偿后可以得到滚转角的控制律,也就是副翼的控制指令:
48、
49、优选的,在步骤s5中,调整固定翼无人机航迹,使无人机进入无人机回收区域包括以下步骤:
50、s5.1、在回收段无人机经过回收框架时,利用独立于rtk装置与无人机的测量装置测量水平方向上无人机与回收框架的偏差;
51、s5.2、根据测量得到的偏差调整航迹点,更新无人机期望飞行轨迹;
52、s5.3、步骤s5.1和步骤s5.2经过2~3次的迭代后,使无人机在水平方向上准确进入无人机的回收区域,此时根据rtk和气压计得到无人机实际高度,降低无人机回收段飞行高度,使无人机进入无人机回收区域完成回收。
53、因此,本发明采用上述结构的一种用于固定翼无人机无损精确回收和自抗扰控制方法,具备的有益效果:
54、回收精度高并且保证了无人机整体结构不受损伤,在固定翼无人机无损精确回收的航迹规划和控制过程中,对固定翼无人机撞线撞网回收等具体应用具有重要意义和参考价值。解决了固定翼无人机回收过程中的航迹规划设计和在外界风力等干扰因素下的控制问题。
55、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,包括以下步骤:
2.根据权利要求1的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,在步骤s1中,固定翼无人机回收区域及rtk基站的布置包括以下步骤:
3.根据权利要求2的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,在步骤s2中,固定翼无人机绕飞并开始用rtk定位获取无人机实时位置包括以下步骤:
4.根据权利要求3的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,在步骤s3中,设定固定翼无人机初始航迹包括以下步骤:
5.根据权利要求4的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于:在步骤s3.1中,自由段为经过无人机回收区域后并且在上升段之前的飞行阶段,上升段为自由段和回收段之间的过渡段,回收段为无人机接近直线轨迹飞往无人机回收区域的飞行阶段。
6.根据权利要求5的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,在步骤s4中,利用自抗扰控制实现无人机沿既定航迹的飞行包括以下三个通道的控制律设计:
7.根据权利要求6的一种用于固定翼无人机无损精确回收和自抗扰控制方法,其特征在于,在步骤s5中,调整固定翼无人机航迹,使无人机进入无人机回收区域包括以下步骤:
技术总结
本发明公开了一种用于固定翼无人机无损精确回收和自抗扰控制方法,属于无人机回收技术领域。包括以下步骤:布置固定翼无人机回收区域及RTK基站;固定翼无人机绕飞并开始用RTK定位得到无人机实时位置;设定固定翼无人机初始航迹;利用自抗扰控制实现无人机沿既定航迹的飞行;调整固定翼无人机航迹,使无人机进入无人机回收区域。本发明提供的一种用于固定翼无人机无损精确回收和自抗扰控制方法,回收精度高并且保证了无人机整体结构不受损伤,对固定翼无人机撞线撞网回收等具体应用具有重要意义和参考价值。解决了固定翼无人机回收过程中的航迹规划设计和在外界风力等干扰因素下的控制问题。
技术研发人员:金如浩,范子琛,霍明英,李铮,于泽,齐乃明
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!