一种无人机飞行参数自诊断方法及系统与流程
发明属于无人机,具体涉及一种无人机飞行参数自诊断方法及系统。
背景技术:
1、无人机由复杂的机械与电子系统构成,是一种由飞行器控制系统和地面的无人机控制中心综合控制运行的复杂设备。其中飞行器控制系统为无人机的主要系统,其包含执行机构、传感系统以及飞控计算机等,主要用来控制无人机的飞行姿态、飞行速度以及飞行路线等。
2、无人机承担着情报、监控、侦察、定点打击以及各类枯燥、肮脏或者危险任务,因此,如何保证无人机的运行可靠性和安全性,是当前研究的重中之重。飞行参数作为无人机的重要指标参数,真实的反应出无人机实际运行的情况与状态,并且通过对无人机的飞行参数进行分析,能够获取无人机潜在或早期的故障因素。
3、现有技术中,对无人机飞行参数与故障之间的内部联系研究较少,大多凭借技术人员的经验或专业知识对飞行参数进行人为处理和分析,导致人力成本投入大,故障诊断准确性差,并且往往在发生坠毁事故等意外情况后,才能得到飞行途中的飞行参数,故障诊断实时性差,导致无人机运行可靠性和安全性低。
技术实现思路
1、为了解决现有技术存在的人力成本投入大,准确性差,实时性差,以及无人机运行可靠性和安全性低的问题,本发明目的在于提供一种无人机飞行参数自诊断方法及系统。
2、本发明所采用的技术方案为:
3、一种无人机飞行参数自诊断方法,包括如下步骤:
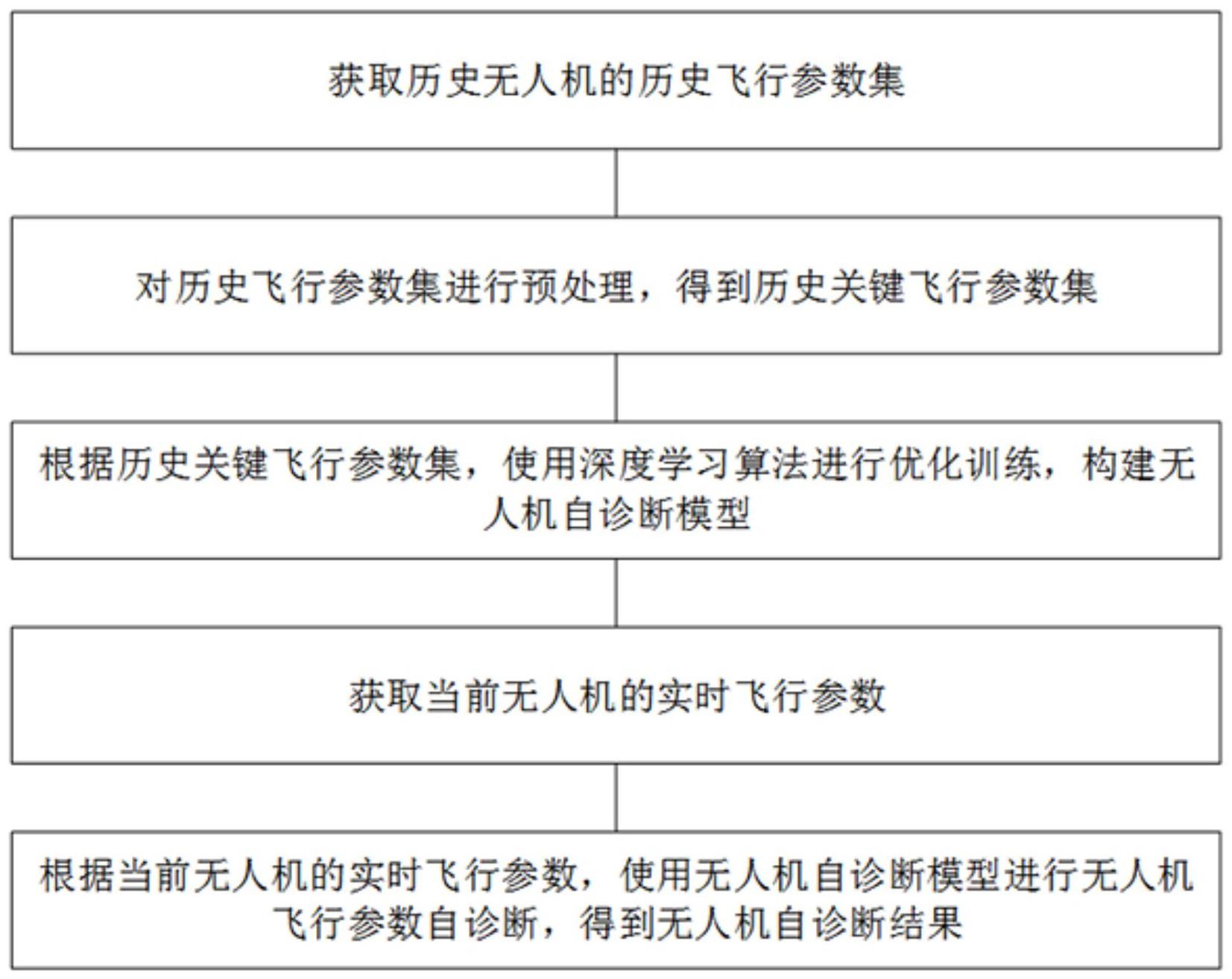
4、获取历史无人机的历史飞行参数集;
5、对历史飞行参数集进行预处理,得到历史关键飞行参数集;
6、根据历史关键飞行参数集,使用深度学习算法进行优化训练,构建无人机自诊断模型;
7、获取当前无人机的实时飞行参数;
8、根据当前无人机的实时飞行参数,使用无人机自诊断模型进行无人机飞行参数自诊断,得到无人机自诊断结果。
9、进一步地,历史飞行参数集中的每条历史飞行参数的数据类型包括实时飞行参数的数据类型;
10、历史飞行参数的数据类型包括无人机的升降舵参数、副翼参数、方向舵参数、俯仰角、俯仰角速率、滚转角、滚转角速率、偏航角、偏航角速率、飞行高度、飞行速度、工作电压、工作电流、工作功率、内部温度、经纬度参数以及故障参数;
11、实时飞行参数的数据类型包括无人机的升降舵参数、副翼参数、方向舵参数、俯仰角、俯仰角速率、滚转角、滚转角速率、偏航角、偏航角速率、飞行高度、飞行速度、工作电压、工作电流、工作功率、内部温度以及经纬度参数。
12、进一步地,对历史飞行参数集进行预处理,得到历史关键飞行参数集,包括如下步骤:
13、对历史飞行参数集进行数据清洗,得到去除冗余的历史飞行参数集;
14、对去除冗余的历史飞行参数集中的每条历史飞行参数添加故障标签,得到添加标签的历史飞行参数集;
15、对添加标签的历史飞行参数集进行数据降维,得到历史关键飞行参数集。
16、进一步地,对添加标签的历史飞行参数集进行数据降维,得到历史关键飞行参数集,包括如下步骤:
17、根据添加标签的历史飞行参数集中的所有历史飞行参数,使用keca算法进行主成分分析,得到历史飞行参数的数据类型与无人机故障相关的相关贡献值;
18、根据数据类型与无人机故障相关的相关贡献值,将若干数据类型进行降序排列,并选取前若干个数据类型,得到历史飞行参数的若干关键数据类型;
19、根据历史飞行参数的若干关键数据类型,对去除冗余的历史飞行参数集进行数据降维,得到历史关键飞行参数集。
20、进一步地,根据历史关键飞行参数集,使用深度学习算法进行优化训练,构建无人机自诊断模型,包括如下步骤:
21、对历史关键飞行参数集进行归一化处理,得到归一化处理的历史关键飞行参数样本集;
22、将归一化处理的历史关键飞行参数样本集划分为测试样本集和训练样本集;
23、根据训练样本集,使用iafsa-dbn算法进行优化训练,得到初始的无人机自诊断模型;
24、将测试样本集输入初始的无人机自诊断模型进行测试,若自诊断准确率达到预设阈值,则输出最优的无人机自诊断模型,否则,继续进行优化训练。
25、进一步地,引入tent混沌序列初始化、动态反向学习策略、粒子化搜索模式以及基于柯西分布的自适应人工鱼视野机制对人工鱼群寻优算法进行改进,得到iafsa寻优算法,使用iafsa寻优算法优化dbn网络的初始网络参数,得到iafsa-dbn算法。
26、进一步地,根据训练样本集,使用iafsa-dbn算法进行优化训练,得到初始的无人机自诊断模型,包括如下步骤:
27、使用iafsa寻优算法优化dbn网络的初始网络参数,即将dbn网络的隐含层数量、隐含层神经元数量、各隐含层之间的神经元连接的初始权值与初始阈值,以及初始学习率作为iafsa种群中人工鱼个体的位置;
28、获取iafsa种群中每条人工鱼个体的适应度值,并根据人工鱼个体的适应度值,保留最优的人工鱼个体;
29、若迭代次数处于迭代后半程,则使用基于柯西分布的自适应人工鱼视野机制对iafsa种群的人工鱼视野进行更新,得到更新后的人工鱼视野,并进入下一步骤,否则,直接进入下一步骤;
30、根据更新后的iafsa种群,进行动态反向学习,得到反向的iafsa种群,并获取更新后的iafsa种群和反向的iafsa种群的所有人工鱼个体的适应度值;
31、根据所有人工鱼个体的适应度值,更新最优的人工鱼个体,得到更新后的最优的人工鱼个体及对应的最优的适应度值;
32、若迭代次数或最优的适应度值满足要求,则输出更新后的最优的人工鱼个体对应的全局最优解,否则,继续更新iafsa种群;
33、将全局最优解作为dbn网络的最优的初始网络参数,将训练样本集输入dbn网络,进行优化训练,得到初始的无人机自诊断模型。
34、进一步地,根据当前无人机的实时飞行参数,使用无人机自诊断模型进行无人机飞行参数自诊断,得到无人机自诊断结果,包括如下步骤:
35、根据历史飞行参数的若干关键数据类型,对当前无人机的实时飞行参数进行数据降维,得到实时关键飞行参数;
36、对实时关键飞行参数进行归一化处理,得到归一化处理的实时关键飞行参数;
37、将归一化处理的实时关键飞行参数输入无人机自诊断模型,进行无人机飞行参数自诊断,得到对应的故障标签;
38、将故障标签作为无人机自诊断结果进行输出。
39、一种无人机飞行参数自诊断系统,用于实现无人机飞行参数自诊断方法,系统包括飞行参数采集单元、数据获取单元、数据预处理单元、模型构建单元以及自诊断单元,飞行参数采集单元设置于无人机,飞行参数采集单元与无人机的飞行器控制系统连接,且飞行参数采集单元与自诊断单元连接,数据获取单元、数据预处理单元、模型构建单元以及自诊断单元依次连接,且数据获取单元与无人机控制中心的数据服务器连接,自诊断单元与无人机控制中心的控制服务器连接;
40、飞行参数采集单元,用于在当前无人机的飞行器控制系统中实时采集当前无人机的实时飞行参数,并将当前无人机的实时飞行参数发送至自诊断单元;
41、数据获取单元,用于在无人机控制中心的数据服务器中获取历史无人机的历史飞行参数集,并将历史飞行参数集发送至数据预处理单元;
42、数据预处理单元,用于对历史飞行参数集进行预处理,得到历史关键飞行参数集,并将历史关键飞行参数集发送至模型构建单元;
43、模型构建单元,用于根据历史关键飞行参数集,使用深度学习算法进行优化训练,构建无人机自诊断模型,并将无人机自诊断模型的模型元数据发送至自诊断单元;
44、自诊断单元,用于根据无人机自诊断模型的模型元数据进行模型重构,得到重构的无人机自诊断模型,根据当前无人机的实时飞行参数,使用重构的无人机自诊断模型进行无人机飞行参数自诊断,得到无人机自诊断结果,并将无人机自诊断结果发送至无人机控制中心的控制服务器。
45、本发明的有益效果为:
46、1)本发明提供的一种无人机飞行参数自诊断方法,根据大量的历史飞行参数集,使用深度学习算法构建无人机自诊断模型,对无人机的飞行参数进行自动化的故障自诊断,避免了飞行参数的人为处理和分析,降低了人力成本投入,提高了故障诊断准确性,并且通过研究无人机故障与飞行参数的内在联系,获取关键飞行参数,在减轻数据处理压力的情况下,提高了无人机飞行参数自诊断的速度和效率。
47、2)本发明提供的一种无人机飞行参数自诊断系统,通过飞行参数采集单元对无人机的飞行器控制系统的实时监测,及时获取飞行参数使用自诊断单元进行自诊断,提高了故障诊断实时性,并将无人机自诊断结果实时发送至无人机控制中心的控制服务器,有利于工作人员及时掌握无人机的飞行状况和故障情况,采取下一步行动,提高了无人机运行可靠性和安全性。
48、本发明的其他有益效果将在具体实施方式中进一步进行说明。
- 还没有人留言评论。精彩留言会获得点赞!