一种系留无人装备及其配套装置的控制方法和系统与流程
本发明属于系留无人装备及其配套装置控制,具体涉及一种系留无人装备及其配套装置的控制方法和系统。
背景技术:
1、无人装备主要为无人机、无人水下机器人等,无人机悬停空中或者无人水下机器人水下作业,电源是否稳定是其工作状态是否稳定的必要保障,对于这一类无人设备而言,一方面需要为无人设备提供动力,以支持无人机飞行或者无人水下机器人在水下的行进和探测;另一方面,提供额外的动力或提供升力来负载水带、水管及其内部的介质来进行喷晒灭火、清洗等作业,或提供牵引力来使水下机器人完成拖拽等作业;另一方面,用于照明的无人机和无人水下机器人还需要进一步的完成照明任务,也需要电能来完成。因此,需要结合无人装备的执行任务的状态参数、以及环境条件参数,建立动力电源与照明电源分配的方法,以及配套装配的控制,实现电源供电的合理分配和无人装备负重的灵活调节,对于无人装备顺利完成任务,保障装备和任务安全,具有重要意义。
2、长续航无人装备,如照明无人机或无人水下机器人,一般采用系留电缆输送高压直流电作为电源,给飞行器、无人水下机器人提供动力和照明灯组供电,为简化系统设计及控制,无人机动力电源和照明灯组电源一般采用同一组系留电缆供电,在无人装备端在分为动力电源回路和照明灯组回路。在野外应用的场景下,通常会使用发电机为其提供能源,发电机输出功率一般按无人装备及灯具最大功率配置,并且由于是野外环境,对发电机无人装备都要进行轻量化改进,以便于野外携带。
3、对于系留供电无人机在不同的系留电缆长度、飞行海拔高度、环境风速等情况下,动力功耗差异较大,一般情况下动力功耗仅为电机最大功率的30-40%。当飞行遭风切变、线缆被意外拉拽等情况,飞行器会出现侧倾、急坠等情况,为了控制姿态,动力功耗会激增至电机最大功率80%以上,甚至100%,此时如果发电机响应不及时,极有可能导致飞行时因动力不足而坠毁。因此,一方面由于轻量化设计,发电机的输出功率无法做到更大(例如只能做到2kw),最大值受到限制,另一方面,并非发电机一直提供最大功率就能保证无人机照明系统稳定的工作,需要根据无人机的状态及时调整动力电源和照明灯组电源的电源分配,以保证系统的安全和稳定。
4、对于系留水带、水管供给流体介质的无人机,如系留水带喷晒灭火机的灭火无人机,系留水管喷晒清洗剂的清洗无人机,在不同的系留水带或水管长度、流体介质密度、飞行海拔高度、环境风速等情况下,动力功耗差异更大,一般情况下,在进行喷晒作业时动力功耗仅可达到电机最大功率的50-60%。当飞行遭风切变、水带、水管或线缆被意外拉拽等情况,飞行器会出现侧倾、急坠等情况,此外从机载的喷口的喷射而出流体会对无人机产生反作用力,因此,供液泵的突然启停都会的无人机的平衡造成影响,为了控制姿态,动力功耗会激增至电机最大功率80%以上,甚至100%,极有可能导致飞行时因动力不足而坠毁,因此,供液稳定、开启关闭柔和,以及及时减轻无人机负重对于飞行和作业安全至关重要的。
5、系留无人水下机器人,为岸基系留供电的自航式水下机器人,不采用注水或排水的方式控制其下潜或上浮,而是采用多个螺旋桨推进推进器,其操控方式与多旋翼无人机类似,通过调节推进器偏转方向及转速控制其下潜、上浮及航行,用于水下侦察、检查、取样、以及夹持拖拽等等作业,也有为水下施工、救援提供大面积、高亮度水下照明的的需求。当期在水下悬浮时,动力需求较小,但在湍急水流,或脱困时,动力功耗较大,也需要根据其所处的水下环境,确定动力电源与任务电源分配的方法,以及实现电源供电的合理分配。
技术实现思路
1、本发明针对无人设备供电分配的需求、执行任务增加的负重与其所处的环境和自身状态关系密切的情况,提出了一种系留无人装备及其配套装置的控制方法和系统,给出针对不同环境状况、以及无人装备自身参数,确定无人装备及其配套装置的控制方法,实现动力电源与任务电源合理分配、实现配套装置的联动控制、及时调整无人装备的负重以减少动力需求,提高无人装备的完成任务的可靠性与安全性。
2、为了实现上述目的,本发明采用的技术方案为:
3、一种系留无人装备及其配套装置的控制方法,包括以下步骤:
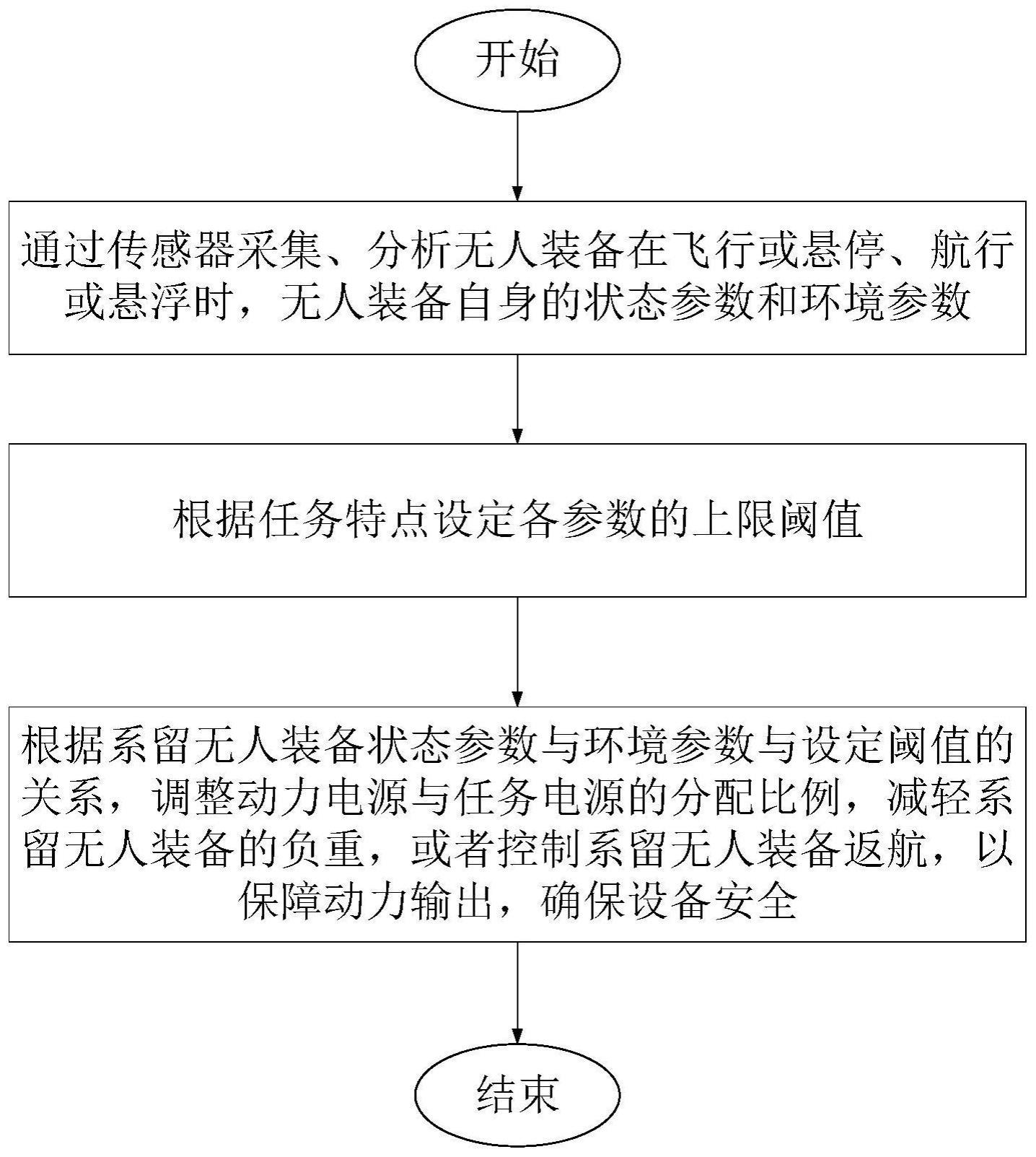
4、通过传感器采集、分析无人装备在飞行或悬停、航行或悬浮时,无人装备自身的状态参数和环境参数,所述状态参数包括速度、姿态、动力参数,所述环境参数包括环境风速和水流速度参数,
5、根据任务特点设定各参数的上限阈值;
6、根据无人装备状态参数与环境参数与设定阈值的关系,调整动力电源与任务电源的分配比例,以保障动力输出,或联动控制配套装置、减少动力需求,确保设备安全。
7、作为优选方案,所述无人装备包括无人机、无人水下机器人、无人船。
8、作为优选方案,所述无人装备自身的状态参数,对于无人机包括:飞行速度、爬升速度、下降速度、倾角、动力电流、电压和剩余电量;对于无人水下机器人包括:航行速度、下潜速度、上浮速度、倾角和动力功耗;对于无人船包括:航向速度、倾角和动力功耗。
9、作为优选方案,所述环境参数,对于无人机包括:风速,对于无人机水下机器人和无人船包括:水流速度。
10、作为优选方案,无人装备执行任务载荷功能所需的动力功率占系统总功率比例为50%-60%,载荷:悬挂的物资,拖拽的物资、人员,系留供水的水带。
11、作为优选方案,对于无人机,若无人机用于照明,在照明无人机飞行或悬停时,根据所述照明无人机的飞行速度、倾角或动力电流,确定照明灯具的开启或关闭;
12、若所述无人机下降速度大于或等于速度阈值,则所述照明灯具关闭;
13、若所述无人机倾角大于或等于倾角阈值,则所述照明灯具关闭;
14、若所述无人机动力电流大于或等于电流阈值,则所述照明灯具关闭。
15、作为优选方案,所述无人机下降速度阈值的取值范围是1~5m/s。
16、作为优选方案,所述无人机倾角阈值的取值范围是15°~50°。
17、作为优选方案,所述无人机电流阈值的取值范围是额定电流的40%~额定电流的100%。
18、作为优选方案,对于水下无人机器人,用于无人机机器人用于照明,在水下机器人潜航或悬浮时,根据所述水流与无人机机器人相对速度、下潜速度、倾角或动力电流,确定照明灯具的开启或关闭;
19、若所述水下无人机器人与水流相对速度大于或等于速度阈值,则所述照明灯具关闭;
20、若所述水下无人机器人下潜速度大于或等于速度阈值,则所述照明灯具关闭;
21、若所述水下无人机器人倾角大于或等于倾角阈值,则所述照明灯具关闭;
22、若所述水下无人机器人动力电流大于或等于电流阈值,则所述照明灯具关闭。
23、作为优选方案,对于水下无人机机器人所述水下无人机器人与水流相对速度阈值的取值范围是1~5m/s。
24、作为优选方案,对于水下无人机机器人所述倾角阈值的取值范围是10°~45°。
25、作为优选方案,对于水下无人机机器人所述电流阈值的取值范围是额定电流的40%~额定电流的75%。
26、作为优选方案,对于无人机,若无人机用于系留水带喷灭火剂灭火或系留水管喷清洁剂进行清洗作业,在无人机飞行或悬停时,根据所述无人机的下降速度、倾角或动力电流,确定照明配套灭火剂供给装置或清洗剂供给装置的启动或停止供液泵,并确定关闭或开启供液阀门以及确定开启或关闭排液阀门;以减轻管路内流体的重量,减轻无人机负重;进一步的,控制无人机下降高度、抛掉水带或水管,进一步的,控制无人机返航或降落。
27、若所述无人机下降速度大于或等于速度阈值,则所述供液泵停止、所述供液阀关闭、所述排放阀开启;
28、若所述无人机倾角大于或等于倾角阈值,则所述供液泵停止、所述供液阀关闭、所述排放阀开启;
29、若所述无人机动力电流大于或等于电流阈值,则所述供液泵停止、所述供液阀关闭、所述排放阀开启。
30、若所述配套装置供液泵停止、所述供液阀关闭、所述排放阀开启后,无人机飞行速度、倾角、动力电流仍大于或等于阈值,则控制无人机下降高度,进一步减轻重量,以利于无人机稳定姿态。
31、若所述无人机下降高度后,无人机飞行速度、倾角、动力电流仍大于或等于阈值,则控制无人机抛掉水管或水带,进一步减轻重量,以利于无人机稳定姿态。
32、若所述无人机抛掉水管或水带后,无人机飞行速度、倾角、动力电流仍大于或等于阈值,则控制降落或返航。
33、作为优选方案,所述无人机下降速度阈值的取值范围是1~2m/s。
34、作为优选方案,所述无人机倾角阈值的取值范围是15°~30°。
35、作为优选方案,所述电流阈值的取值范围是额定电流的40%~额定电流的70%。
36、作为优选方案,若无人水下机器人用于拖拽作业,根据所述无人机器人与水流与相对速度、下潜速度、倾角或动力电流,确定无人水下机器人停止潜航或上浮,或进一步的,控制无人水下机器人抛掉夹持或拖拽的物体,减轻无人机负重。
37、若所述无人水下机器人上浮速度小于或等于速度阈值,则停止上浮;
38、若所述无人水下机器人动力电流大于或等于电流阈值,则停止航行;
39、若所述无人水下机器人动力电流大于或等于电流阈值,且上浮速度<0m/s,或无人机器人与水流与相对速度<0m/s,则控制水下机器人释放夹持或拖拽的物体。
40、作为优选方案,所述无人水下机器人上浮速度阈值的取值范围是0.1~1m/s。
41、作为优选方案,所述无人水下机器人动力电流阈值的取值范围是额定电流的60%~额定电流的90%。
42、基于相同的构思,还提出了一种系留无人装备及其配套装置的控制系统,包括至少一个处理器,以及与所述至少一个处理器通信连接的存储器;所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述任一项所述的一种无人装备的电源管理方法。
43、综上所述,由于采用了上述技术方案,本发明的有益效果是:
44、本发明提供的一种系留无人装备及其配套装置的控制方法和系统,给出针对不同环境状况、以及无人装备自身参数,确定无人装备及其配套装置的控制方法,实现动力电源与任务电源合理分配、实现配套装置的联动控制、及时调整无人装备的负重以减少动力需求,提高无人装备的安全性。
- 还没有人留言评论。精彩留言会获得点赞!