一种烹饪温度控制方法及智能锅具与流程
本技术涉及烹饪控制,特别是涉及一种烹饪温度控制方法及智能锅具。
背景技术:
1、在日常烹饪过程中,用户不能准确控制烹饪温度,且烹饪过程中不同区域的温度差异较大,当达到目标烹饪温度时,部分区域的烹饪温度偏高,易产生油烟,同时,烹饪过程中,用户需手动不断的搅拌锅内食物,让其受热均匀,增加了油烟吸入的几率。
2、在烹饪过程中,如何准确控制火力,并使食物受热均匀,避免产生大量油烟和有害物质成为人们亟需解决的问题。
3、因此,亟需一种烹饪温度控制方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种烹饪温度控制方法及智能锅具。
2、第一方面,提供了一种烹饪温度控制方法,所述方法应用于智能锅具,所述智能锅具包括搅拌装置和多个温度传感器,多个所述温度传感器分别设置于所述搅拌装置的高度方向上的多个不同高度的预设位置上,所述方法包括:
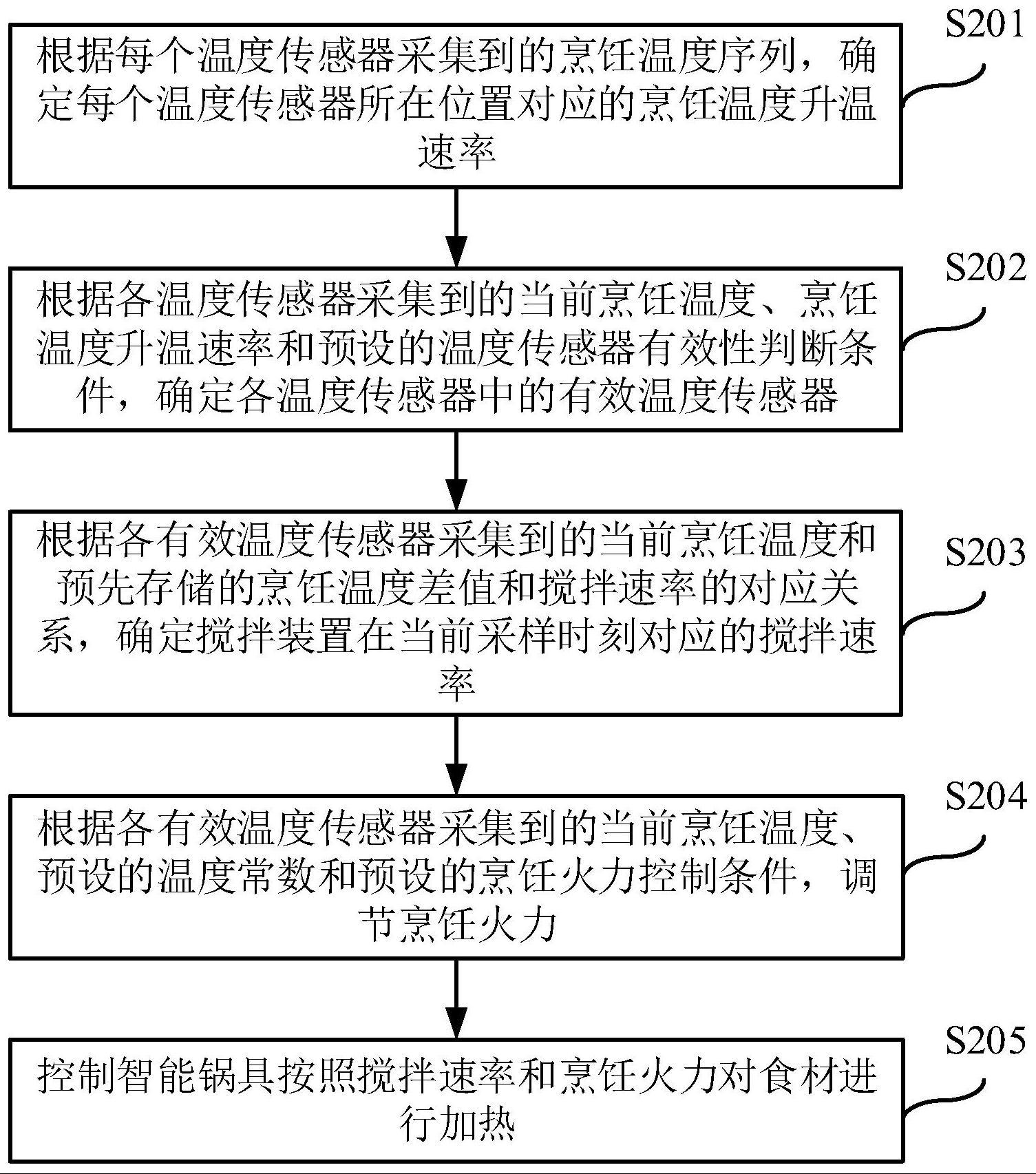
3、根据每个所述温度传感器采集到的烹饪温度序列,确定每个所述温度传感器所在位置对应的烹饪温度升温速率;
4、根据各所述温度传感器采集到的当前烹饪温度、所述烹饪温度升温速率和预设的温度传感器有效性判断条件,确定各所述温度传感器中的有效温度传感器;
5、根据各所述有效温度传感器采集到的当前烹饪温度和预先存储的烹饪温度差值和搅拌速率的对应关系,确定所述搅拌装置在当前采样时刻对应的搅拌速率;
6、根据各所述有效温度传感器采集到的当前烹饪温度、预设的温度常数和预设的烹饪火力控制条件,调节烹饪火力;
7、控制所述智能锅具按照所述搅拌速率和所述烹饪火力对食材进行加热。
8、作为一种可选的实施方式,所述根据每个所述温度传感器采集到的烹饪温度序列,确定每个所述温度传感器所在位置对应的烹饪温度升温速率,包括:
9、对每个所述温度传感器采集到的烹饪温度序列进行线性拟合,分别得到每个所述温度传感器采集到的烹饪温度序列对应的线性拟合曲线;
10、将每个所述温度传感器采集到的烹饪温度序列对应的线性拟合曲线的斜率,分别确定为各所述温度传感器所在位置对应的烹饪温度升温速率。
11、作为一种可选的实施方式,所述根据各所述温度传感器采集到的当前烹饪温度、所述烹饪温度升温速率和预设的温度传感器有效性判断条件,确定各所述温度传感器中的有效温度传感器,包括:
12、将距离所述搅拌装置末端最近的温度传感器采集到的烹饪温度,确定为基准烹饪温度,将该温度传感器对应的烹饪温度升温速率,确定为基准烹饪温度升温速率;
13、针对每个所述温度传感器,如果采集到的烹饪温度与所述基准烹饪温度的差值的绝对值大于预设的温差阈值;或,
14、所述基准烹饪温度升温速率与所述烹饪温度升温速率的差值大于预设的第一升温速率阈值;或,
15、所述烹饪温度升温速率小于预设的第二升温速率阈值,则将所述温度传感器确定为无效温度传感器,并将位置高于所述无效温度传感器的其他温度传感器,均确定为无效温度传感器;
16、在所述各温度传感器中,淘汰所述无效温度传感器,确定所述有效温度传感器。
17、作为一种可选的实施方式,所述根据各所述有效温度传感器采集到的当前烹饪温度和预先存储的烹饪温度差值和搅拌速率的对应关系,确定所述搅拌装置在当前采样时刻对应的搅拌速率,包括:
18、针对各所述有效温度传感器采集到的当前烹饪温度,确定最大当前烹饪温度与最小当前烹饪温度的当前烹饪温度差值;
19、在所述预先存储的烹饪温度差值和搅拌速率的对应关系中,查询所述当前烹饪温度差值对应的目标搅拌速率,并将所述目标搅拌速率确定为所述搅拌装置在当前采样时刻对应的搅拌速率。
20、作为一种可选的实施方式,所述根据各所述有效温度传感器采集到的当前烹饪温度、预设的温度常数和预设的烹饪火力控制条件,调节烹饪火力,包括:
21、根据各所述有效温度传感器采集到的当前烹饪温度和预设的温度常数,确定所述智能锅具的当前锅具温度;
22、根据所述智能锅具的当前锅具温度和所述预设的烹饪火力控制条件,确定所述烹饪火力;
23、实时计算所述智能锅具的实时锅具温度升温速率,并根据所述实时锅具温度升温速率、预设的目标锅具温度升温速率和锅具温度升温速率阈值,调节所述烹饪火力。
24、作为一种可选的实施方式,所述根据各所述有效温度传感器采集到的当前烹饪温度和预设的温度常数,确定所述智能锅具的当前锅具温度的公式为:
25、
26、其中,ttotal为智能锅具的当前锅具温度,a为温度常数,ti为第i个有效温度传感器采集到的当前烹饪温度,n为有效温度传感器的数量。
27、作为一种可选的实施方式,所述预设的烹饪火力控制条件为:
28、如果预设的目标锅具温度与所述当前锅具温度的差值大于预设的第五温差阈值,则按照预设的升温阶段烹饪火力档位进行加热;
29、如果预设的目标锅具温度与所述当前锅具温度的差值小于或等于所述预设的第五温差阈值,且大于预设的第六温差阈值,则按照预设的最低烹饪火力档位进行加热,并按照所述预设的最低烹饪火力档位加热预设烹饪时长;
30、如果预设的目标锅具温度与所述当前锅具温度的差值小于或等于所述预设的第六温差阈值,且大于或等于预设的第七温差阈值,则将所述烹饪火力的档位调至关闭档位。
31、作为一种可选的实施方式,所述锅具温度升温速率阈值包括第一锅具温度升温速率阈值和第二锅具温度升温速率阈值,所述根据所述实时锅具温度升温速率、预设的目标锅具温度升温速率和锅具温度升温速率阈值,调节所述烹饪火力,包括:
32、根据所述实时锅具温度升温速率和所述预设的目标锅具温度升温速率,确定相对锅具温度升温速率;
33、如果所述相对锅具温度升温速率大于所述第一锅具温度升温速率阈值,则将所述烹饪火力的档位降低预设数目个档位;
34、如果所述相对锅具温度升温速率小于或等于所述第一锅具温度升温速率阈值,且大于或等于所述第二锅具温度升温速率阈值,则维持所述烹饪火力的档位;
35、如果所述相对锅具温度升温速率小于所述第二锅具温度升温速率阈值,则将所述烹饪火力的档位升高预设数目个档位。
36、作为一种可选的实施方式,所述方法还包括:
37、当总烹饪时长达到预设的目标烹饪时长,控制所述智能锅具停止烹饪。第二方面,提供了一种智能锅具,其特征在于,所述智能锅具包括搅拌装置、加热装置、主控装置和多个温度传感器;其中,所述主控装置控制所述搅拌装置和所述加热装置,以实现如第一方面任一项所述的烹饪温度控制方法。
38、本技术提供了一种烹饪温度控制方法及智能锅具,本技术的实施例提供的技术方案至少带来以下有益效果:根据每个温度传感器采集到的烹饪温度序列,确定每个温度传感器所在位置对应的烹饪温度升温速率。根据各温度传感器采集到的当前烹饪温度、烹饪温度升温速率和预设的温度传感器有效性判断条件,确定有效温度传感器。根据各有效温度传感器采集到的当前烹饪温度和预先存储的烹饪温度差值和搅拌速率的对应关系,确定搅拌装置在当前采样时刻对应的搅拌速率。根据各有效温度传感器采集到的当前烹饪温度、预设的温度常数和预设的烹饪火力控制条件,调节烹饪火力。控制智能锅具按照搅拌速率和烹饪火力对食材进行加热。本技术通过搅拌装置上不同高度上预设位置处设置的温度传感器,采集不同智能锅具内不同高度的烹饪温度,从而判断是否存在温度分布不均的情况,并根据烹饪温度的温差,按照不同的搅拌速率进行搅拌,使锅具内烹饪温度分布均匀,无需用户人工搅拌。并根据锅具温度变化,及时调整火力,避免锅具温度突变,温控更精确。另外,为了避免温度传感器采集的数据不可用,从而影响锅具整体温度的判断,本技术加入了温度传感器有效性判断逻辑,及时剔除无效数据,保证锅具温度计算的准确性。
39、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!