一种结合改进秃鹰搜索算法的超临界机组模糊建模方法
本发明涉及火力发电机组灵活性运行的协调控制系统建模,更具体地,涉及一种结合改进秃鹰搜索算法的超临界机组模糊建模方法。
背景技术:
1、在全球化石能源环境危机下,我国电力行业仍主要依托火力发电,亟待推进电力系统的新能源消纳以促进化石能源的清洁替代。而风、光等可再生新能源对环境变化敏感,表现出明显的随机性和间歇性,为电网安全稳定带来隐患。急需提高作为稳定电能供应资源的火电机组的灵活性运行能力平抑新能源接入下的电网波动。超临界机组以安全高效等突出优势在电力生产领域受到广泛关注,不仅要求其具有较高的运行灵活性,还应表现出一定的经济性能。火电机组灵活运行主要借助灵活性改造、优化调度和控制策略优化来实现深度调峰和快速负荷调控。
2、为应对新能源并网带来的负荷扰动,必须提升火电机组的灵活性运行能力,以适应电网多重形式的调度。国内外专家学者针对提升火电机组灵活性运行能力的研究成果主要有两个方向:一是提升火电机组的调峰深度,二是提升机组的快速负荷响应能力。
3、火电机组一般将水作为参与循环的工质,根据其存在的状态可以将火电机组划分为亚临界机组和超临界机组,当工质的温度超过374.15℃,压力超过22.129mpa时便称为超临界机组。超临界机组是目前在我国火力发电厂中大规模应用的一种先进设备,其功率容量大、发电热效率高、污染排放低等诸多优点倍受赞誉,而且其可靠性、可用率以及机组寿命等方面也达到了极高的标准。我国能源结构不断调整,新能源大规模化并网,电网波动性日益增强,因此电力系统对火电机组深度调峰的需求越来越迫切。而超临界机组的灵活性运行技术可提升机组调峰的快速性和深度,并保持平稳安全运行,因此深入推进超临界机组灵活性运行技术的发展和应用对于提升电力系统调控能力、保障电网的安全稳定运行具有重要的意义。然而,灵活性运行工况下的锅炉汽轮机系统的动态特性十分复杂,常规的控制手段难以满足要求。为了保证其安全稳定运行,需要研究先进的控制策略。因此,目前对超临界机组进行的灵活性运行的研究也是主要针对超临界机组协调控制系统。一个先进的控制系统必须依托于一个精确、简洁的动态数学模型。由此可知,建立灵活性运行工况下的协调控制系统模型是对超临界机组进行灵活性运行研究的重要前提。因此,本文将超临界机组的协调控制系统作为被控对象,为其设计一种结合改进秃鹰搜索算法的超临界机组模糊建模方法,对提高大型火力发电机组的灵活性运行能力具有重要意义。
技术实现思路
1、本发明旨在提供一种结合改进秃鹰搜索算法的超临界机组模糊建模方法,为超临界机组协调控制系统提供一种精确的模型,以便于先进控制器的设计,从而提高机组的负荷快速响应能力。该方法充分考虑了超临界机组的结构以及其运行特点,并得到了精度较高的协调控制系统的三入三出模型。
2、本发明所提出的一种结合改进秃鹰搜索算法的超临界机组模糊建模方法,由以下4个步骤组成:
3、s1:分析超临界机组协调控制系统的动态特性和建模难点;
4、s2:实现基于混沌自适应秃鹰搜索算法的数据自动聚类;
5、s3:完成基于指数加权最小二乘法的模型辨识;
6、s4:依托仿真平台分析并验证所建立模型的可行性。
7、s1:超临界机组工作步骤一般为:首先原煤经过送煤机送入制粉系统,研磨成细度合适的煤粉并由预热器带来的一次风烘干后,送入炉膛内使其燃烧,加热锅炉給说水使其变为高温高压的蒸汽流进汽轮机系统驱动汽轮机叶片旋转做功,完成热能至机械能的转变。汽轮机旋转会带动发电机的转子转动,此时驱汽机做功后的乏汽会排入凝汽器,依次通过低压加热器、除氧器、给水泵、高压加热器后,通过省煤器将预热后的给水送入水冷壁,受来自炉膛火焰辐射加热后送入过热系统,开启新一轮循环。
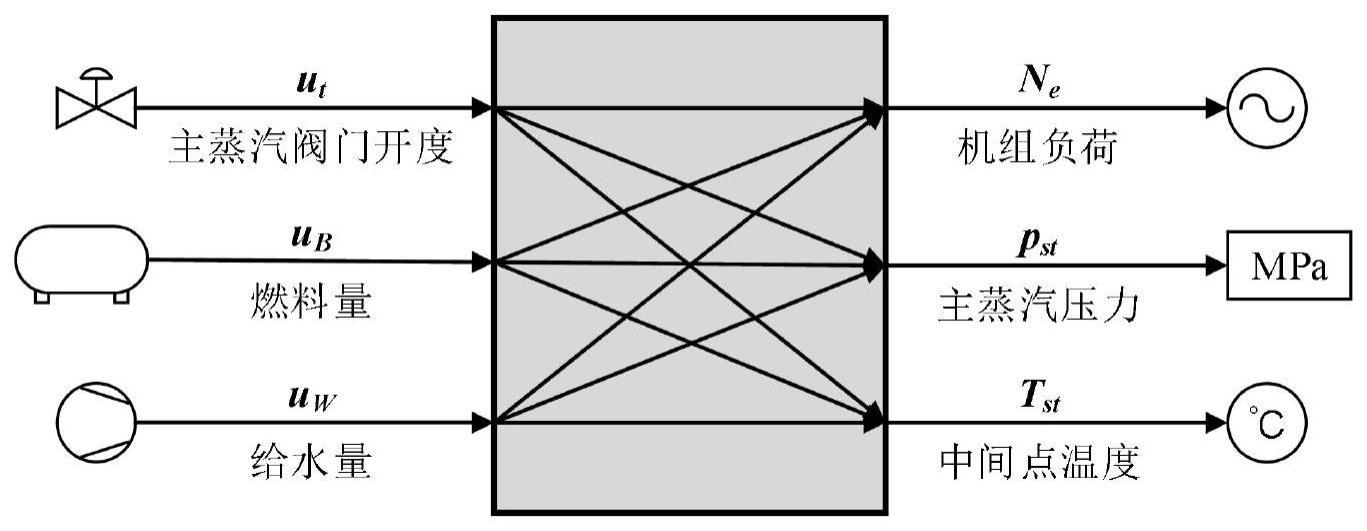
8、超临界机组的协调控制系统一般选择分层结构来完成整体的控制任务,上层的主控系统由负荷指令控制中心和机炉协调控制器组成,首先上层负荷指令控制中心接收操作员指令、电网调度指令和频率偏差信号,并对它们进行初步的分析处理,将得到的实际负荷指令传递给机炉协调控制器,再根据机组实际运行的输出反馈信号及指令信号,计算出相应的子系统的主控指令并分别传递给相应子系统。由锅炉和汽轮机子系统组成下层的子控制系统,接收上层主控系统传递来的控制指令并转化为实际的控制量,通过控制锅炉系统中燃料量、送风量、给水量与汽机系统中阀门开度等关键参数实现协调控制。这种分层协调控制结构,既能保证对电网侧负荷指令响应的快速性,也能保证机组稳定、安全的运行。超临界机组的协调控制系统可以简化为三输入三输出的系统。该耦合系统中,三个控制量分别是主蒸汽阀门开度、燃料量和给水量,三个被控量分别是机组的负荷、主蒸汽压力和中间点温度。相比于亚临界机组,超临界机组协调控制系统具有更高的耦合程度与非线性程度,在灵活性运行过程中,负荷在大范围变工况时会发生超临界和亚临界状态的切换,此时的动态特性也会发生巨大变化,提升了建立系统模型与设计控制策略的难度。被控量与控制输入量之间相互强耦合且伴随着时变、大延迟、非线性等复杂动态特性,加之电网随机性的波动,使机组的协调控制系统很难获取满意的控制品质。
9、基于s1的分析可知,超临界机组协调控制系统因其复杂的动态特性,传统的控制器较难达获取满意的控制性能,要想使用先进的控制器,首先我们需要一个精确的超临界机组模型。因此提出了一种结合改进秃鹰搜索算法的超临界机组模糊建模方法获取机组的精确模型为先进控制器的设计奠定基础,致力于提高机组的灵活性运行能力。首先,对获取的大量机组实际运行数据进行处理,采用混沌自适应秃鹰搜索算法实现数据的自动聚类,则步骤s2可具体化为:
10、s2.1:相较于其他智能优化算法,秃鹰搜索算法在收敛速度和精度性能上略胜一筹,但算法本身仍存在容易陷入局部最优和收敛精度低的问题。因此提出了一种改进的秃鹰搜索算法(cabes)。主要从三个方面对原始的秃鹰搜索算法进行改进,首先,使用tent混沌映射对种群进行初始化,有效保持种群的多样性,提高秃鹰的全局搜索能力;其次在搜索阶段通过融入自适应惯性权重来提高秃鹰的局部搜索能力;最后使用柯西变异提升算法的整体寻优能力。
11、tent混沌映射:
12、
13、式(1)中,xi表示随机生成的第i个取值范围在0到1之间的数字;
14、自适应惯性权重:
15、
16、式(2)中,w表示自适应惯性权重;t表示当前迭代数;tmax是设置的种群最大迭代次数;wmax是初始惯性权重;wmin是秃鹰种群最大迭代次数时的惯性权重。将惯性权重因子引入秃鹰搜索优化算法中,在探索阶段,秃鹰的位置更新为:
17、pi,new=w×pi+x(i)×(w×pi-pmean)+y(i)(w×pi-pi+1) (3)
18、式(3)中,x(i)与y(i)表示在极坐标下秃鹰的位置;pi表示第i只秃鹰的位置;pi+1表示第i只秃鹰下一更新的位置;pmean表示秃鹰在经过前次搜索后所在的平均分布位置;
19、柯西变异:
20、pnew,best=pbest+pbest×cauchy(0,1) (4)
21、式(4)中,pbest表示秃鹰目前根据其先前的搜索中确定的最佳搜索位置;cauchy表示标准的柯西分布概率密度函数公式;
22、s2.2:对于一个多输入多输出的系统,可以将其看作是由多个多输入单输出的系统组成,且火电机组实际运行数据增量的线性度高于变量本身,对于一个有个min个输入和mout个输出的非线性系统,可以由如下的模糊规则描述:
23、
24、其中,ri表示第i个模糊规则,k表示参与数据聚类的个数,n为聚类训练中的采样点个数,表示示采样间隔为t的包括待辨识模型的所有输入输出的变量,ci和ri分别表示第i个规则的聚类中心和聚类半径,yvi(t)是第i个数据对应的局部模型的输出,θ是结论部分的参数向量,v(t)是x(t)的增量,表示为:
25、
26、式(6)中,和分别表示输入向量和输出向量在第i个聚类中的稳态值,可以从聚类中心中得到。在第i个规则下对应的局部模型的输出可以表示为:
27、
28、模糊模型的全局输出可以通过对各局部模型进行模糊加权获得:
29、
30、其中的ωi是隶属度函数,通过式(9)计算得到:
31、
32、由于数据有限,无法覆盖整个输入空间,如果有一个数据不属于任何聚类,则寻找距离其最近的聚类中心cs,并将该聚类所对应的子模型的输出作为当前的全局输出。为了得到模型的输出,基于混沌自适应秃鹰搜索算法对数据进行聚类以获得聚类中心。
33、s2.3:混沌自适应秃鹰搜索算法的数据自动聚类步骤为:
34、步骤1:输入数据集并初始化聚类数目。输入待聚类的数据集合,并记做x=[x(1),…,x(n)],n为输入数据的总数,设置初始化聚类数k=1。
35、步骤2:计算数据相似度并归一化处理。首先将当前的聚类中心选为数据集中的第一项,即ck=x(1),再计算其他数据与当前聚类中心的相似度s0:
36、
37、式(10)中ζ表示相似常数,d[ck,x(t)]表示两者间的距离。由于不同的数据变量量级差异较大,因此进行归一化操作消除其影响:
38、
39、式(11)中smax和smin分别代表相似度的最大值和最小值。
40、步骤3:确定当前的聚类规模。首先引入相似度决策变量η用以判断数据x(t)(t=2,3,…,n)是否属于当前聚类,若归一相似度s[ck,x(t)]>η,那么判定该数据属于以ck为中心的聚类,将属于此聚类的所有数据总数记做ac。
41、步骤4:获取初始聚类中心。引入阈值va,聚类规模的下限ln设置为阈值与数据总数的乘积,即ln=va·n。若ac>ln,那么确定ck为当前的聚类中心且将该聚类内的所有数据从原数据空间内删除,然后继续进行下一步操作;否则标记ck不是当前的聚类中心并将x(1)移至数据末尾,返回步骤2。
42、步骤5:使用cabes修正聚类中心。将聚类中心为ck的数据集合记作xk={xk(1),xk(2),…,xk(ac)},基于cabes对聚类中心进行修正,首先产生一个待选择的聚类中心,搜索维度d代表聚类中心中容纳元素的个数,将cabes中的位置以mi(t)表示,由于在聚类中k表示聚类的个数,因此cabes中当前的迭代次数以t表示,其他参数定义不变。给定聚类中心修正的目标函数作为cabes的适应值函数:
43、
44、通过式(12)适应值函数,使用cabes进行聚类中心的修正,将最终所得的秃鹰的全局最优位置作为最优聚类中心
45、步骤6:计算聚类半径。首先将聚类半径rk设为0,计算聚类k中所有的元素和最优聚类中心的距离,选择其中最大距离以更新聚类半径:
46、
47、步骤7:终止条件判断。上述运算完成后,原始数据空间中剩余的数据个数为n=n-ac,如果此时n比聚类规模的下限ln小,说明满足聚类结束条件,所得结果为所有聚类中心和聚类半径的最优解,否则令k=k+1,返回步骤2继续进行聚类运算。
48、s3:基于指数加权最小二乘的模型辨识具体化为:
49、最小二乘法是较为成熟的一种数据驱动建模方法,通过将模型的输出和待辨识数据的误差最小化得到模型最佳参数。因此在经典最小二乘法的基础上引入指数项,提高算法参数的收敛速度,得到更高的辨识精度。
50、通过s2的自动聚类方法将实际数据划分为多个不同工况下的k个子数据空间,基于指数加权最小二乘(ewls)的方法获得子模型参数,首先通过以下步骤计算待辨识的参数矩阵θi=(i=1,2,…,k):
51、初始化回归矩阵引入回归矩阵pi,并进行初始化:
52、pi(0)=εi(i=1,2,…,k) (15)
53、式(15)中的ε是一个远大于1的常数,i是维度为mout×mout的单位阵。
54、辨识模型参数:如果即当前的数据x(t)属于聚类i,则对参数矩阵进行迭代计算:
55、
56、
57、ξi(t+1)=ξ0ξi(t)+1-ξ0 (18)
58、上式中,系数ξi的初值ξ0=ξi(1)=0.6,v(t)代表数据向量的增量,为模型输出的估计,为稳态时的模型输出(此处与相应聚类中心值相等),q为指数加权因子:q=e-t/q(t=1,2,…,n),q=50为指数加权常数。
59、如果说明当前的数据x(t)不属于聚类i,则回归矩阵和参数矩阵不变,保留上一步计算所得的值:
60、
61、迭代终止判断:当t≥n时,说明迭代计算过程已经将所有的数据遍历完成,此时结束参数估计过程,并记录当前的最优参数矩阵,否则返回第(2)步继续运算。
62、到此,完成了在t-s模糊规则下,基于cabes的数据自动聚类算法和ewls算法的超临界机组协调控制系统的模型辨识。
63、基于步骤s2和s3所建立的超临界机组模型,为后续先进控制器的设计和使用奠定了基础。在步骤s4中依托仿真平台验证并分析所建立模型的可行性,具体过程如下:
64、s4.1:以我国北方某660mw超临界机组的5300组历史实际运行数据为基础,选用s2和s3所设计的结合改进秃鹰搜索算法的t-s建模方法获取超临界机组协调控制系统的模型并进行验证。
65、s4.2:将超临界协调控制系统简化为三个三输入一输出的子系统,三个子系统的输入量均为主蒸汽阀门开度、燃料量和给水量,输出变量分别为机组的负荷、主蒸汽压力和中间点温度;随后基于所提建模算法获取三个子系统的模型,并绘制出三个子系统的实际输出与机组实际运行输出数据的拟合曲线以及误差曲线;
66、s4.3:通过s3完成模型辨识后,对建立后模型输出的平均绝对误差(mae),均方根误差(rmse)和拟合精度(r2)进行计算,确定模型的精度。
67、
68、
69、
70、s4.4:为了量化对比辨识结果的性能,将s3计算出的结果与另外两种算法辨识(熵_t-s、秃鹰搜索算法_t-s)的性能进行对比。
71、s4.5:为了检验模型的通用性,选择在不同负荷段中机组的其他数据集进行测试,因此将机组在30%额定工况、50%额定工况和90%额定工况运行的数据作为测试集进行验证,每个验证集包含500组数据,并绘制其仿真结果图。
72、本发明有益效果:
73、本发明结合我国电力生产领域逐步提升新能源电力消纳能力的发展趋势,从建模的角度出发,为超临界机组协调控制系统提供了一种基于数据驱动并融合改进秃鹰搜索算法的t-s建模方法,为后续先进控制器的设计和使用奠定了基础,从而可以提高大型火力发电机组机组负荷快速控制能力。
74、本发明基于数据驱动并融合改进秃鹰搜索算法的t-s建模过程中,充分考虑了超临界机组协调控制系统的复杂动态特性及建模难点,在模糊建模过程中,前件部分使用先进的混沌自适应秃鹰搜索算法对机组运行的数据进行自动聚类,后件部分采用指数加权最小二乘法对模型参数进行辨识,从而使所建立的超临界机组模型具有较高的精度。
75、本发明将被控对象简化为一个三入三出的系统,更能准确地描述大型火力发电机组锅炉-汽轮机单元的动态特性。此外,根据每一个输出分别建立关于三个输入的子模型,从而获得准确的机组的有功功率、主蒸汽压力、分离器出口温度的变化趋势和模型参数,实现了机组深度快速响应负荷指令的同时保证其安全稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!