一种升压站巡检机器人路径引导方法与流程
本发明属于路径引导,具体是一种升压站巡检机器人路径引导方法。
背景技术:
1、升压站指的是一个使通过的电荷电压变换的整体系统。主要用来升压,目的是减小线路电流借以减小电能的损失。
2、升压站巡检机器人主要实现升压站内各种仪器、仪表以及刀闸开关等设备的智能巡检。在实际使用过程中,若升压站内需要检修作业,操作人员会设置安全区域。
3、该区域有时会与机器人巡检线路发生干涉,此时,工作人员需在机器人上位机控制平台中,手动划定限行区域,防止机器人误入作业禁区。
4、然而,上述方法较为繁琐,机器人的禁行区域需要人工设定,机器人无法实现自主禁行区域识别,无法满足人们的需求。
5、为此,我们提出一种升压站巡检机器人路径引导方法。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供一种升压站巡检机器人路径引导方法。
2、为实现上述目的,本发明采用了如下技术方案:
3、一种升压站巡检机器人路径引导方法,包括以下步骤:
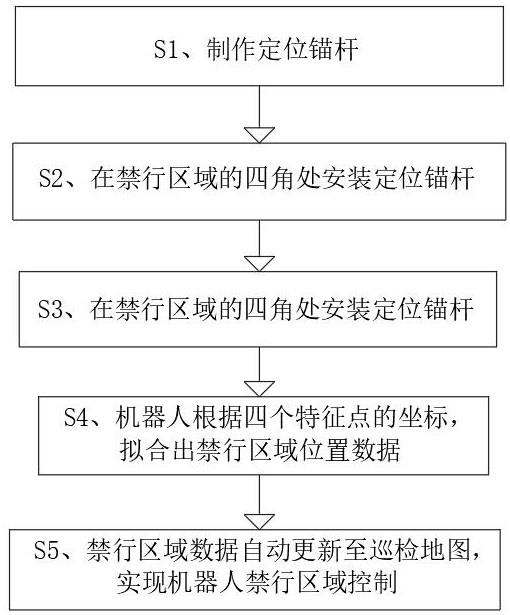
4、s1、制作若干组定位锚杆;
5、s2、在禁行区域的四角处安装定位锚杆;
6、s3、定位锚杆向机器人控制系统发送相应位置坐标;
7、s4、机器人根据四个特征点的坐标,拟合出禁行区域位置数据;
8、s5、禁行区域数据自动更新至巡检地图,实现机器人禁行区域控制。
9、优选的,所述步骤s1中定位锚杆使用锂电池供电。
10、优选的,所述步骤s1中定位锚杆包括杆主体、设置在杆主体外壁上部的光伏发电组件和设置在杆主体顶端的控制器,所述光伏发电组件可对锂电池进行供电。
11、优选的,所述步骤s1中控制器的顶端设置有天线。
12、优选的,所述步骤s1中定位锚杆的内部安装有集成gps定位模块。
13、优选的,所述步骤s1中在光伏发电组件可设置为柔性光伏。
14、优选的,所述步骤s2中定位锚杆的底端呈尖头结构,便于垂直安装在禁行区域的四角处。
15、优选的,所述步骤s3中定位锚杆通过集成gps定位模块定时向机器人控制系统发送坐标数据。
16、与现有技术相比,根据本发明的一种升压站巡检机器人路径引导方法具有如下有益效果:
17、采用本发明方法对升压站巡检机器人路径的进行引导,能够使得升压站巡检机器人不会行驶到设定的禁行区域,能够快速实现升压站内各种仪器、仪表以及刀闸开关等设备的智能巡检,且禁行区域数据自动更新至巡检地图,实现机器人禁行区域控制。
技术特征:
1.一种升压站巡检机器人路径引导方法,其特征在于,包括以下步骤:
2.如权利要求1的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s1中定位锚杆(1)使用锂电池供电。
3.如权利要求2的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s1中定位锚杆(1)包括杆主体(4)、设置在杆主体(4)外壁上部的光伏发电组件(5)和设置在杆主体(4)顶端的控制器(6),所述光伏发电组件(5)可对锂电池进行供电。
4.如权利要求3的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s1中控制器(6)的顶端设置有天线(7)。
5.如权利要求4的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s1中定位锚杆(1)的内部安装有集成gps定位模块。
6.如权利要求5的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s1中在光伏发电组件(5)可设置为柔性光伏。
7.如权利要求6的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s2中定位锚杆(1)的底端呈尖头结构,便于垂直安装在禁行区域(2)的四角处。
8.如权利要求7的一种升压站巡检机器人路径引导方法,其特征在于:所述步骤s3中定位锚杆(1)通过集成gps定位模块定时向机器人(3)控制系统发送坐标数据。
技术总结
本发明公开了一种升压站巡检机器人路径引导方法,属于路径引导技术领域;包括以下步骤制作定位锚杆、在禁行区域的四角处安装定位锚杆、定位锚杆向机器人控制系统发送相应位置坐标、机器人根据四个特征点的坐标,拟合出禁行区域位置数据、禁行区域数据自动更新至巡检地图。本发明公开了一种升压站巡检机器人路径引导方法,采用本发明方法对升压站巡检机器人路径的进行引导,能够使得升压站巡检机器人不会行驶到设定的禁行区域,能够快速实现升压站内各种仪器、仪表以及刀闸开关等设备的智能巡检,且禁行区域数据自动更新至巡检地图,实现机器人禁行区域控制。
技术研发人员:李继伟,盖科成,邱林年,张斐,葛军,王兴盛,曹昱冲,徐永宁,马国荣,梁红超,程斌,黄涛,李亚龙,罗英春,郭辉,郑宏阳,李践,杨婷婷,胡嘉琪,金龙,赵霞
受保护的技术使用者:华能平凉发电有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!