一种多智能体系统规模可变的分布式编队控制方法及装置
本发明涉及多智能体系统编队控制领域,尤其涉及一种多智能体系统规模可变的分布式编队控制方法及装置。
背景技术:
1、多智能体系统编队控制是人工智能-群体智能领域重要的研究方向。多无人机、无人车、无人船等无人集群系统都属于多智能体系统的概念范畴,其编队控制在军事和民用领域均有着广泛的运用,例如多无人潜航器编队执行水下侦察任务,多无人机编队空中喷洒农药等。在实际应用中,集群中的智能体可能会丢失,或者是新增了一些智能体。比如无人机集群协同作战时,部分无人机被击毁或者又增援了一些无人机,此时无人机需要形成新的编队队形,完成作战任务;太空多卫星集群协同工作时,如若部分卫星突然失效或新增了卫星加入集群,也需要自主调整编队队形,维持系统正常运转,发挥最大效能。然而现有的编队控制方法大多假定集群中的智能体个数在任务执行过程中始终保持不变,没有考虑集群系统规模发生变化时,编队如何自适应的进行调整。当智能体数量发生变化时,容易引发集群系统队形紊乱,依赖于队形结构的功能模块失效等问题,导致多智能体系统协同作业能力大幅减弱,同时,由于控制器相关参数设计一般也依赖于事先已知的某几类通信拓扑结构,当拓扑节点个数变化也会导致控制器系统失稳。为了增强多智能体系统应对规模变化时的自适应编队控制能力,应考虑节点丢失或增加时的拓扑重建策略,并设计多智能体系统拓扑变化自适应的编队控制方法,从已有的研究成果来看,尚未见到关于多智能体系统规模可变的分布式编队控制方法的研究。
技术实现思路
1、针对目前多智能体系统面对规模发生变化时,编队自适应控制能力不足的问题,本发明提供了一种多智能体系统规模可变的分布式编队控制方法,旨在构建智能体丢失或增加时的通信拓扑重建机制,给出多智能体系统拓扑节点增减自适应的完全分布式编队控制方法,从而设计出多智能体系统规模可变的分布式编队控制策略;本发明的目的主要是通过下述方案得以实现的:
2、一种多智能体系统规模可变的分布式编队控制方法,其特征在于,包括以下步骤:
3、s1:构建多智能体系统动力学模型;
4、s2:基于多智能体系统动力学模型,确定通信拓扑节点自动分级策略;
5、s3:基于通信拓扑节点自动分级策略,确定智能体增减自适应编队控制策略。
6、进一步的,步骤s1的具体操作为:
7、多智能体系统包含的智能体个数随时间序列t1,t2,...,tk,tk+1,…变化,记时间区段[tk,tk+1)内的智能体个数为n(tk),以第i个智能体为例,其动力学模型建立如下:
8、
9、其中,xi(t)表示智能体的状态向量,为xi(t)的导数,i表示智能体的编号,t表示时间变量,a表示系统特征矩阵,b表示系统输入矩阵,ui(t)表示系统控制输入。
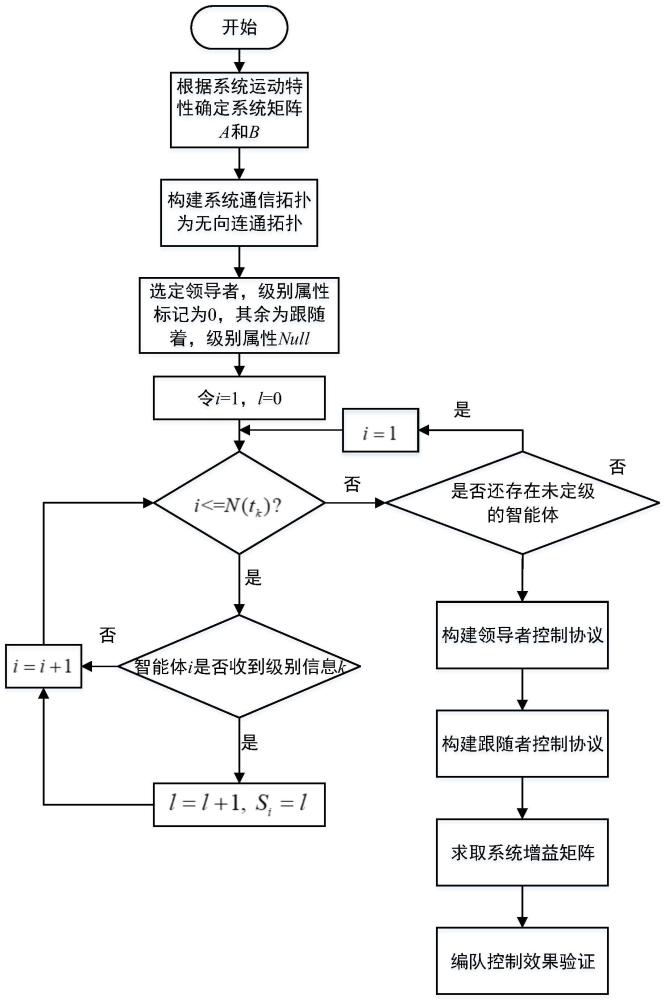
10、进一步的,步骤s2的具体操作包括以下步骤:
11、s201:构建多智能体系统的通信网络,确保智能体间的通信拓扑是无向连通的,同时每个智能体均有一个级别属性值,记为si(i=0,1,...,n(tk));
12、s202:任意选定一个智能体作为系统的领导者,并将自身级别属性标记为s0=0,其余智能体为跟随者,级别属性标记为null;定义级别变量l=0,将变量l值传输至其所有邻居;
13、s203:跟随者检测是否能收到级别变量l值信息,是则将自身级别属性值由null改为si=l+1级,并令l=l+1,将更新后的l值信息传输到其邻居智能体;否则级别属性值仍为null;
14、s204:判断是否还存在级别属性为null的智能体,是则返回步骤s203,否则继续步骤s3。
15、进一步的,步骤s3的具体操作包括以下步骤:
16、s301:设计领导者的控制协议为
17、
18、其中序号0表示领导者的编号,u0(t)为领导者控制输入,x0(t)为领导者的状态向量,km表示领导者的控制增益,c(t)为需要跟踪的编队中心运动轨迹,为c(t)的导数;
19、s302:设计跟随机的控制协议为
20、ui(t)=ui1(t)+ui2(t) (3)
21、其中,
22、
23、其中,ui1(t)为协同误差反馈项,ui2(t)为输入补偿项;kf表示跟随者的控制增益,表示智能体i在[tk,tk+1)时间段内的邻居集,wij(tk)为智能体i和j在[tk,tk+1)时间段内的通信权重,wim(tk)为智能体i和领导者在[tk,tk+1)时间段内的通信权重,fi(t,n(tk))和fj(t,n(tk))分别为智能体i和j的时变编队函数,b1为能够使得b1b=i的矩阵,其中i为单位矩阵,表示领导者控制输入的2-范数上界,sgn(ui1(t))为ui1(t)的符号向量函数,该函数计算结果为一个和ui1(t)同维的向量,且当ui1(t)中的元素分别为正数、零和负数时,sgn(ui1(t))中对应元素的值分别为1,0和-1;
24、s303:求取满足系统稳定性要求的增益矩阵km和kf,并将其代入式子(3)和(4)中,验证多智能体系统规模可变编队控制效果。
25、进一步的,步骤s303中求取增益矩阵kf的具体操作包括以下步骤:
26、s3031:任选一个正实数σ,求取满足以下线性矩阵不等式的正定矩阵q:
27、qa+atq-bbt+σq<0;
28、s3032:取kf=-0.5btq-1。
29、一种多智能体系统规模可变的分布式编队控制装置,其特征在于,包括多智能体系统动力学模型建立模块,通信拓扑节点自动分级模块和智能体增减自适应编队控制模块;所述多智能体系统动力学模型建立模块用于构建多智能体系统动力学模型;
30、通信拓扑节点自动分级模块用于构建通信网络、选定领导者、设计跟随者分级策略,以及判断级别传递信息;
31、智能体增减自适应编队控制模块用于设计领导者控制协议、跟随者控制协议,以及求取增益矩阵和验证多智能体系统规模可变编队控制效果。
32、一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的方法。
33、一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行上述的方法。
34、与现有技术相比,本发明的有益效果是:
35、如仿真结果所示,本发明可实现多智能体系统规模可变的分布式时变编队控制;通过设计多智能体系统控制流拓扑自动分级策略,以及节点增减自适应的编队控制协议,使得多智能体系统具备了队形结构随规模变化而自适应调整的功能,提高了其对于节点资源的重组和复用能力,增强了系统对于部分节点突发故障丢失和冗余节点应急接入的自我管理和修复功能,进而提升了系统的可靠性和容错性能。本发明潜在的应用涵盖多无人机系统、多机器人集群系统、多卫星系统等多智能体系统的规模可变分布式编队控制。
- 还没有人留言评论。精彩留言会获得点赞!