一种出行辅助系统的制作方法
本发明涉及辅助出行,尤其涉及一种出行辅助系统。
背景技术:
1、地铁站通常有多层结构,其内部空间复杂,人流量大,且经常需要上下楼梯或电梯,为一些行动不便的乘客或携带较多物品的乘客带来了困难。而传统自主导航移动机器人多用于乘客问询,站内巡检或其他的运维功能,少有地铁站内可以直接用于乘客辅助运输或物品辅助运输的机器人装备或系统,使用工作人员的人工帮助与指引又会带来人力成本的提升。
技术实现思路
1、本发明提供一种出行辅助系统,用以解决现有技术中地铁站内缺乏成熟的出行辅助系统和解决方案的缺陷,实现地铁站内直接点到点导航与运输辅助。
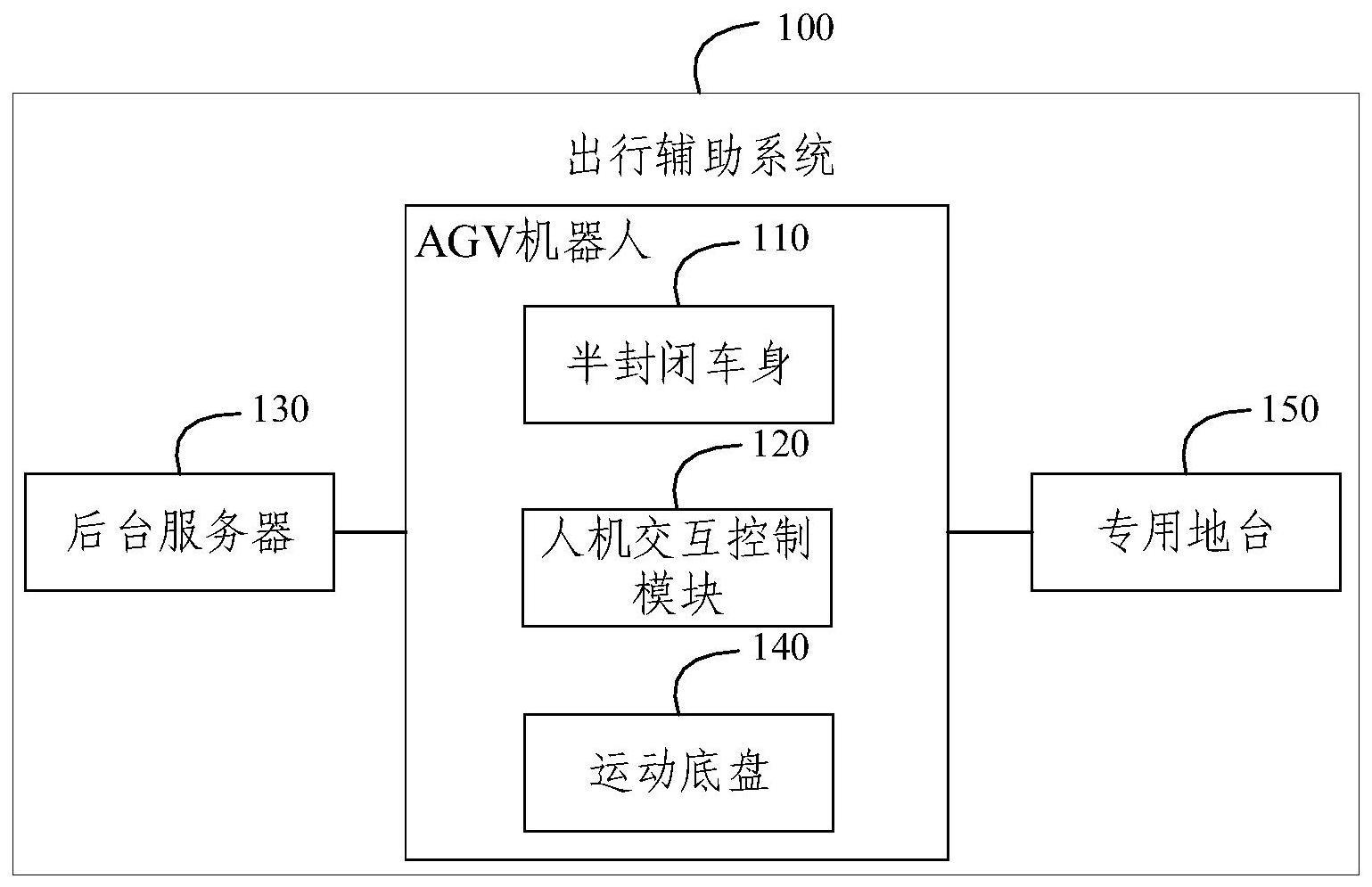
2、本发明提供一种出行辅助系统,包括:自动导向agv机器人、与所述agv机器人通信连接的后台服务器和专用地台;所述agv机器人包括:半封闭车身、人机交互控制模块和运动底盘;
3、其中,所述半封闭车身用于容纳物理承载;
4、所述人机交互控制模块用于接收用户的输入,所述输入至少包括用户设置从始发地到目的地的操作;
5、所述后台服务器用于从所述人机交互控制模块获取所述始发地和目的地,基于所述始发地和目的地,规划所述agv机器人的磁轨迹行动路线;
6、所述运动底盘用于基于规划的所述agv机器人的磁轨迹行动路线,驱动所述agv机器人移动至所述目的地;
7、所述专用地台设置于至少一个预设地点,所述至少一个预设地点包括所述始发地和所述目的地,所述专用地台用于在所述agv机器人行驶至所述专用地台上的情况下,装载或卸下所述物理承载;
8、其中,所述专用地台包括无障碍坡道,所述无障碍坡道用于在所述agv机器人行驶至所述专用地台上的情况下,使所述物理承载通过所述无障碍坡道移动至所述半封闭车身内,或使所述物理承载通过所述无障碍坡道离开所述半封闭车身。
9、根据本发明提供的一种出行辅助系统,所述出行辅助系统还包括设置在磁轨迹路线沿线上至少一个特殊点位的二维码标识,所述二维码标识用于辅助所述agv机器人识别所述agv机器人当前所位于的特殊点位,并基于所述特殊点位的类型调整所述agv机器人的运动模式;
10、其中,所述特殊点位的类型包括以下一项或多项:磁轨迹路线的分支、电梯口、闸机,不同的类型对应agv机器人的不同运动模式;
11、所述磁轨迹路线是预先铺设的至少连接多个专用地台和/或至少一个特殊点位的路线。
12、根据本发明提供的一种出行辅助系统,所述运动底盘至少包括驱动装置和环境感知传感器,所述环境感知传感器包括摄像头和激光雷达;
13、其中,所述摄像头用于读取二维码标识以识别所述二维码标识所处的特殊点位;
14、所述激光雷达用于对所述agv机器人周围的障碍物进行实时识别,以使所述agv机器人在行驶过程中避开所述障碍物。
15、根据本发明提供的一种出行辅助系统,所述运动底盘还用于:
16、在所述agv机器人行驶至所述至少一个特殊点位的情况下,扫描所述agv机器人当前所位于的特殊点位处的二维码,以识别所述agv机器人当前所位于的特殊点位,并基于所述特殊点位的类型调整所述agv机器人的运动模式,以使所述agv机器人通过当前所位于的特殊点位。
17、根据本发明提供的一种出行辅助系统,所述系统还包括:
18、定位模块,用于在所述agv机器人移动至所述目的地的途中,确定所述agv机器人的实时位置;
19、校正模块,用于在所述agv机器人移动至所述目的地的途中,确定所述agv机器人的实时位置是否偏离规划的所述磁轨迹行动路线,若是,基于所述agv机器人的实时位置、所述磁轨迹行动路线和所述目的地,规划局部行驶路径使所述agv机器人回到距离所述agv机器人最近的磁轨迹行动路线上以继续按照所述磁轨迹行动路线行驶。
20、根据本发明提供的一种出行辅助系统,所述定位模块还用于:
21、在所述agv机器人出现故障的情况下,发送所述agv机器人的故障报警信息,所述故障报警信息中包括所述agv机器人的实时位置。
22、根据本发明提供的一种出行辅助系统,所述系统还包括:
23、建筑信息模型bim建模模块,用于存储所有铺设的所述磁轨迹路线的建模坐标集合和所有所述二维码标识对应的特殊点位信息,所述特殊点位信息包括特殊点位的类型和特殊点位的位置坐标;
24、所述后台服务器具体用于:从所述人机交互控制模块获取所述始发地和目的地,基于所述bim中存储的所有铺设的所述磁轨迹路线的建模坐标集合、所述始发地、和所述目的地,规划所述agv机器人的磁轨迹行动路线。
25、根据本发明提供的一种出行辅助系统,所述专用地台还包括无线充电装置,所述无线充电装置用于在所述agv机器人位于所述专用地台上的情况下,为所述agv机器人充电。
26、根据本发明提供的一种出行辅助系统,所述人机交互控制模块包括:触控屏和/或语音模块;
27、其中,所述触控屏用于接收用户的触摸输入,所述触摸输入为用户通过触摸所述触控屏实现的输入;
28、所述语音模块用于接收用户的语音输入,所述语音输入为用户通过语音实现的输入。
29、根据本发明提供的一种出行辅助系统,所述人机交互控制模块还用于:
30、接收用户的第二输入,所述第二输入为用户需要人工援助的操作;
31、接收用户的第三输入,所述第三输入为用户查看所述agv机器人的状态和/或设置所述agv机器人的参数的操作;
32、响应所述第三输入,显示所述agv机器人的状态和/或参数;
33、所述出行辅助系统还包括:
34、输出模块,用于响应所述第二输入,输出求助信号。
35、本发明提供的一种出行辅助系统,通过在多个点位设置专用地台,使出行人员顺利登上agv机器人,出行人员通过人机交互模块可以自由选择目的地,后台服务器根据目的地可以自动计算出合理的行驶路线,使运动底盘驱动agv机器人自动行驶至目的地,半封闭车身可以在行驶过程中保护出行人员,可以实现地铁站内点到点的运输,节省人力成本。
技术特征:
1.一种出行辅助系统,其特征在于,包括:自动导向agv机器人、与所述agv机器人通信连接的后台服务器和专用地台;所述agv机器人包括:半封闭车身、人机交互控制模块和运动底盘;
2.根据权利要求1所述的出行辅助系统,其特征在于,所述出行辅助系统还包括设置在磁轨迹路线沿线上至少一个特殊点位的二维码标识,所述二维码标识用于辅助所述agv机器人识别所述agv机器人当前所位于的特殊点位,并基于所述特殊点位的类型调整所述agv机器人的运动模式;
3.根据权利要求2所述的出行辅助系统,其特征在于,所述运动底盘至少包括驱动装置和环境感知传感器,所述环境感知传感器至少包括摄像头和激光雷达;
4.根据权利要求3所述的出行辅助系统,其特征在于,所述运动底盘还用于:
5.根据权利要求1所述的出行辅助系统,其特征在于,所述系统还包括:
6.根据权利要求5所述的出行辅助系统,其特征在于,所述定位模块还用于:
7.根据权利要求4所述的出行辅助系统,其特征在于,所述系统还包括:
8.根据权利要求1所述的出行辅助系统,其特征在于,所述专用地台还包括无线充电装置,所述无线充电装置用于在所述agv机器人位于所述专用地台上的情况下,为所述agv机器人充电。
9.根据权利要求1所述的出行辅助系统,其特征在于,所述人机交互控制模块包括:触控屏和/或语音模块;
10.根据权利要求1所述的出行辅助系统,其特征在于,所述人机交互控制模块还用于:
技术总结
本发明提供一种出行辅助系统,包括:自动导向AGV机器人、后台服务器和专用地台;AGV机器人包括:半封闭车身用于容纳物理承载、人机交互控制模块用于接收用户的输入,所述输入至少包括用户设置从始发地到目的地的操作,运动底盘用于基于所述AGV机器人的磁轨迹行动路线,驱动所述AGV机器人移动至所述目的地;后台服务器用于从所述人机交互控制模块获取所述始发地和目的地,规划AGV机器人的磁轨迹行动路线;专用地台设置于至少一个预设地点,用于在所述AGV机器人行驶至所述专用地台上的情况下,装载或卸下所述物理承载;其中,所述专用地台包括无障碍坡道用于使物理承载通过无障碍坡道进入或离开半封闭车身内。
技术研发人员:张辉,吴正中,马博璋,刘喆,王晓东,张东东,邓能文
受保护的技术使用者:北京城建智控科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!