一种航空发动机环境下的机器人路径规划方法
本发明涉及一种航空发动机环境下的机器人路径规划方法,属于机器人路径规划技术。
背景技术:
1、航空发动机原位无损检测是指在发动机装配(不分解)状态下,对发动机内部结构,如叶片、轮盘、支板等采用无损检测的手段进行状态判断、故障提取的一种检测方法。最近几十年随着机器人技术的不断发展,将机器人应用于航空发动机检测逐渐受到国内外众多研究机构的关注。这其中的一个关键问题就是如何实现机器人在航空发动机内部的导航,而导航问题的核心环节正是机器人的路径规划问题。
2、对于移动机器人而言,路径规划是实现机器人自主导航及执行其他任务的基础,也是移动机器人技术最核心的研究内容之一。从机器人问世到现在,路径规划问题一直都是国内外机器人领域的热点话题。
3、不同于其它环境中的路径规划问题,航空发动机环境下的路径规划问题更加复杂,主要体现在:(1)非结构化。航空发动机内部存在各种不规则障碍,且排布规律性不强,极易出现障碍重叠遮挡导致障碍识别错误;(2)密闭不透光。航空发动机内部的这种密闭不透光的特殊环境给机器人的无线信号传输、视觉感知等都带来了极大困难;(3)障碍排布密集,停机叶片位置随机。发动机内部环境可通行区域较为狭窄,停机叶片位置无法确定。
4、现有的路径规划技术研究的工作环境与航空发动机环境有较大差别,没有考虑到航空发动机环境的特殊性,规划出的路径往往不是最优路径。此外,转子叶片停机位置的不确定也对传统路径规划方法提出了挑战。因此,研究一种针对航空发动机环境的机器人路径规划方法十分必要。
技术实现思路
1、针对现有技术方案的不足,本专利提供了一种适用于航空发动机环境下的机器人路径规划方法,将基于图搜索算法的全局路径规划方法与基于模糊逻辑推理的局部避障算法结合,可有效解决航空发动机环境下的机器人路径规划问题。
2、本发明技术方案为一种航空发动机环境下的机器人路径规划方法,包括如下步骤:
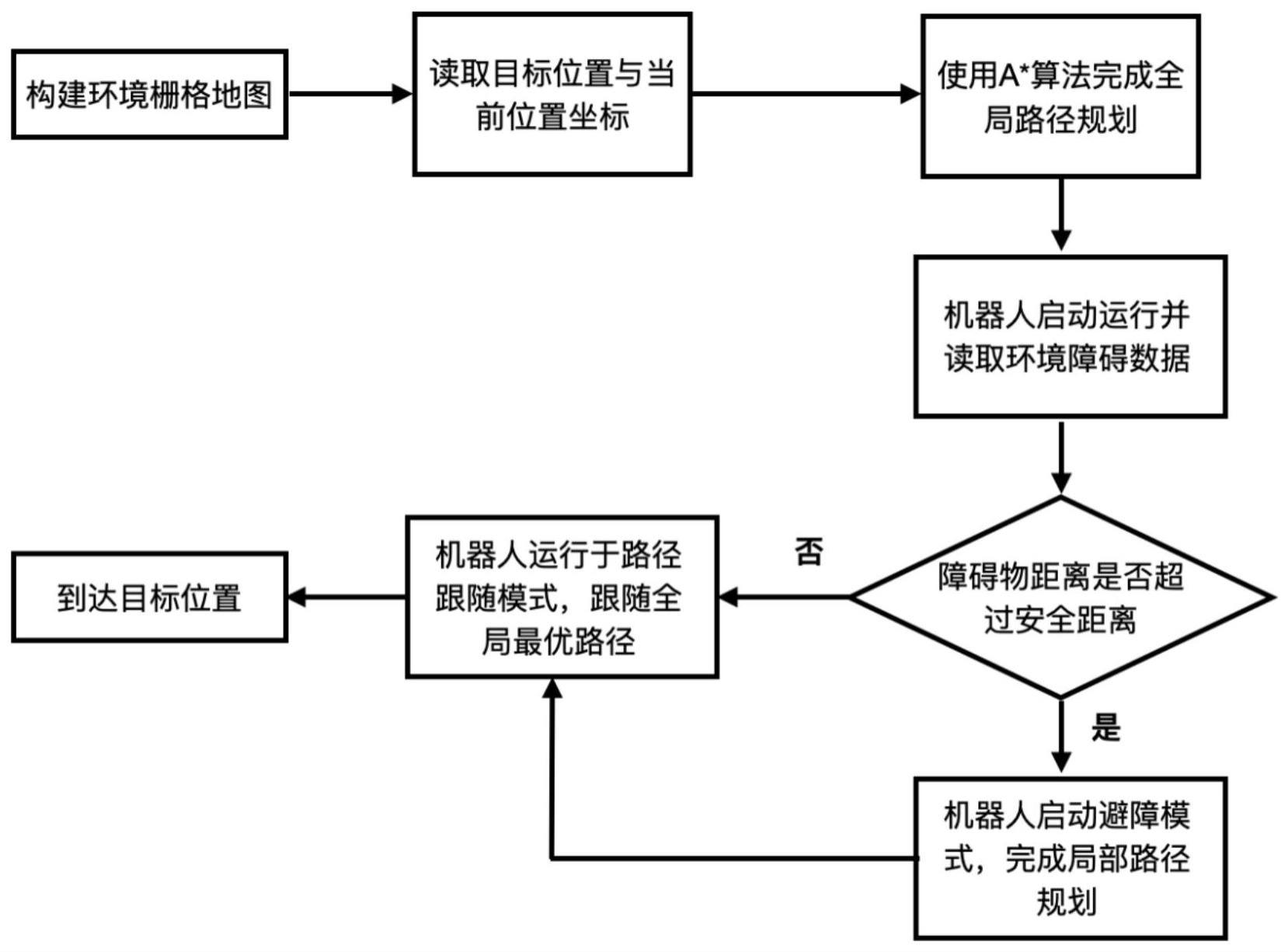
3、步骤1:栅格化环境地图:将航空发动机模型转化为栅格地图,根据机器人尺寸对障碍物进行膨胀处理,保证机器人的安全运行距离;使用一个二值占用变量表示该栅格单元是否被障碍物占用,机器人的工作空间被划分为两种区域:a)自由区域,即无障碍区域,占用变量值为“0”,机器人可以自由通过;b)障碍物区域,该区域被障碍物占据,占用变量值为“1”,机器人在进行路径规划时需要避开;
4、步骤2:机器人获取目标点以及当前位置坐标;
5、步骤3:全局路径规划:使用图搜索算法在栅格地图中搜索出一条从起点到终点之间的最优无障碍路径;
6、全局路径规划的具体过程为:机器人首先读取当前位置坐标和目标坐标;然后使用a*算法搜索出从当前位置到目标点之间的最短无障碍路径;最优路径是指在保证安全距离、路径满足机器人动力学限制的情况下路径长度最短;
7、步骤4:机器人运行模式自动切换:机器人启动运行后,会根据实时探测到的环境信息自动切换运行模式;机器人的运行模式有两种:路径跟随模式,避障模式;机器人通过搭载在机身上方的激光雷达实时确定路径方向上的障碍物距离;当障碍距离高于安全距离时,机器人运行于路径跟随模式,即跟随全局最优路径朝向目标移动;当障碍物距离小于安全距离时,机器人将切换至避障模式,此时机器人将会根据障碍物的方位调整运动方向;
8、步骤5:局部路径规划:在机器人沿全局路径向目标点移动过程中,当路径上存在障碍且障碍物的距离小于安全距离时,机器人将会切换至避障模式进行局部的路径修正,以避开突发的障碍;机器人使用避障模式越过障碍后将重回全局最优路径,运行模式也将自动切换至路径跟随模式;机器人在运行过程中自动完成运行模式切换,直至移动到目标位置。
9、所述步骤5中,机器人的局部路径规划采用基于模糊逻辑推理的方法,具体的规划过程包括以下步骤:
10、步骤5.1:机器人立即停止运行;
11、步骤5.2:局部环境地图更新;
12、步骤5.3:计算障碍物边界与机器人运行方向的夹角;
13、步骤5.4:根据所属区域将其转化为不同的模糊逻辑变量;
14、机器人以自身位置坐标为中心,以机器人前进方向为0°方向,左右每隔30°划分为一个区域,前进方向相邻的两个区域合并为正前区域,正前方60°夹角的区域,两侧向中间依次为左侧区域、左前区域、右侧区域、右前区域,即将机器人正前方划分为五个区域,每个区域对应一个模糊逻辑变量,构成一个模糊子集;机器人根据障碍物与0°方向的夹角判断障碍物所属区域;
15、步骤5.5:使用预先编制的模糊推理规则得出机器人的调整方向;
16、步骤5.6:机器人改变方向运行并判断是否通过障碍:若通过障碍,则执行步骤5.6;否则,返回步骤5.1;
17、步骤5.7:机器人重新回到全局最优路径上来,完成局部路径规划过程。
18、所述步骤5.2中,局部环境地图更新用于减少前期的栅格化误差,对栅格地图做进一步精确化分割,基本过程为:a)机器人通过机载传感器估计当前位置,通过粒子滤波方法与全局栅格地图匹配,确定当前位置坐标;b)机器人以0.25倍栅格距离沿障碍物横向移动,实时感知当前障碍物位置坐标。c)在全局地图中确定障碍附近全局规划路径关键点,以全局路径关键节点作为局部地图边界,完成局部环境地图的更新。
19、所述步骤5.5中,模糊推理规则结合机器人几何尺寸基于实际环境的测试得出,模糊推理规则用于将输入的模糊逻辑变量映射到模糊逻辑输出变量,再通过解模糊过程即可得到机器人的实际调整参数;所述模糊逻辑变量由障碍物所属区域确定。
20、有益效果:由上述本发明提供的技术方案可以看出,本发明提出的路径规划方法专门针对航空发动机环境,能够有效解决航空发动机无损检测任务中的机器人路径规划问题;采用a*图搜索算法可以保证机器人全局运行路径最优,采用基于模糊逻辑的避障算法能够有效避开随机障碍,路径安全性高;同时该路径规划方法便于部署实施。
技术特征:
1.一种航空发动机环境下的机器人路径规划方法,包括如下步骤:
2.如权利要求1所述的一种航空发动机环境下的机器人路径规划方法,其特征在于,所述步骤5中,机器人的局部路径规划采用基于模糊逻辑推理的方法,具体的规划过程包括以下步骤:
3.如权利要求2所述的一种航空发动机环境下的机器人路径规划方法,其特征在于,所述步骤5.2中,局部环境地图更新用于减少前期的栅格化误差,对栅格地图做进一步精确化分割,基本过程为:
4.如权利要求2所述的一种航空发动机环境下的机器人路径规划方法,其特征在于,所述步骤5.5中,模糊推理规则结合机器人几何尺寸基于实际环境的测试得出,模糊推理规则用于将输入的模糊逻辑变量映射到模糊逻辑输出变量,再通过解模糊过程即可得到机器人的实际调整参数;所述模糊逻辑变量由障碍物所属区域确定。
技术总结
本发明提供了一种航空发动机环境下的机器人路径规划方法,综合考虑航空发动机环境存在的大量不规则障碍以及停机位置随机的转子叶片障碍等因素,将全局路径规划与局部路径规划结合,其包括:将发动机环境栅格化,构建环境栅格地图;使用图搜索算法(A*算法等)搜索全局最优路径;使用基于模糊推理的方法实现机器人实时避障,进行局部路径规划。本发明原理简单、执行效率高,能够有效克服复杂航空发动机环境因素对机器人行进路线的不确定性影响,提高机器人的运动安全性,更好满足实际工作需求。
技术研发人员:牛夷,姜晶,马二琦,邹文婧,高山,王超
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!