一种电动高空作业平台爬坡安全控制方法与流程
本发明涉及高空作业平台,特别涉及一种电动高空作业平台爬坡安全控制方法。
背景技术:
1、随着社会的发展与进步,高空产品的应用也越来越广泛,自行走式高空作业平台作为一种特殊的工程机械,在行业中扮演了越来越重要的作用。随着高空产品的规模不断增加,安全可靠性显得尤为重要,车辆爬坡时制动可靠是高空产品爬坡过程中安全和稳定的重要保证。
2、目前高空产品按动力源分类主要有柴动、混动、电动三种类型。柴动机型减速机内置液压制动相对可靠,混动机型减速机同柴动因此制动可靠。电动机型驱动系统采用新能源动力电池-电驱-电机三电架构,特点是应用轮边驱动方式,四轮均配置行驶电机,车辆行走动力由电机带动减速机提供,车辆制动通过电机内部电磁抱闸实现停车制动,此种制动方式广泛应用于电动工程机械,但是由于工程机械存在吨位大、高负荷运转等客观因素,导致电机制动力不足出现车辆溜坡或者电机失速问题,造成重大生命、财产损失。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种电动高空作业平台爬坡安全控制方法,以解决电动高空作业平台爬坡时出现的溜坡、电机失速等问题。
2、为达到上述目的,本发明是采用下述方案实现的:
3、本发明提供了一种电动高空作业平台爬坡安全控制方法,包括:
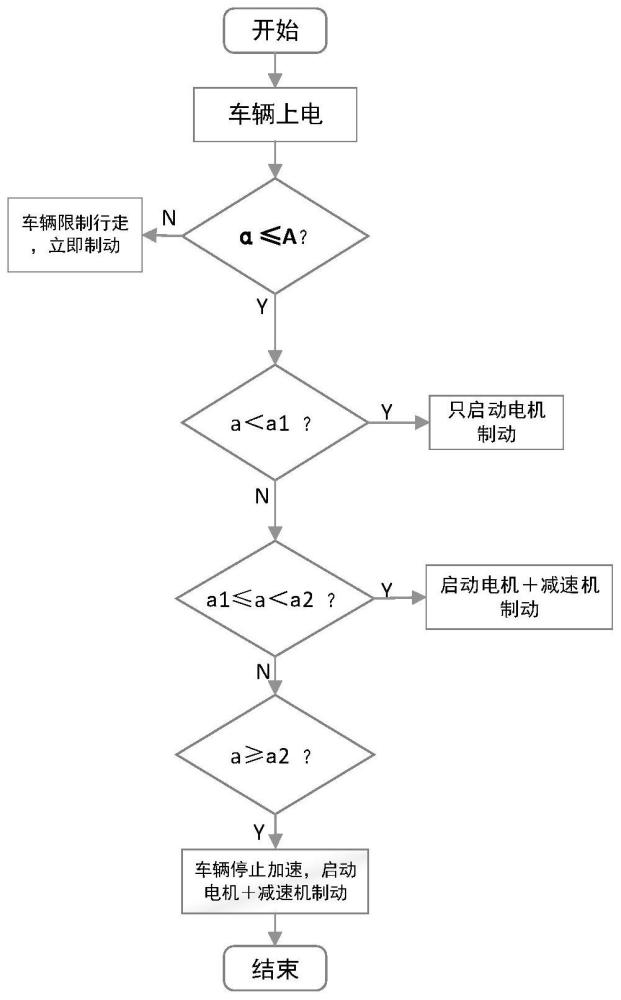
4、获取电动高空作业平台的爬坡角度α和下坡加速度a;
5、根据电机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a1,根据电机制动力和减速机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a2;
6、当a<a1时,执行电机制动,当a1≤a<a2时,执行电机制动和减速机制动,当a≥a2时,电动高空作业平台停止加速,执行电机制动和减速机制动。
7、进一步地,获取电动高空作业平台的爬坡角度α,包括:
8、采用角度传感器检测获得电动高空作业平台的爬坡角度α;
9、其中,角度传感器配置在电动高空作业平台上,角度传感器与电动高空作业平台的ecu电信号连接。
10、进一步地,获取电动高空作业平台的下坡加速度a,包括:
11、采用加速度传感器检测获得电动高空作业平台的下坡加速度a;
12、其中,加速度传感器配置在电动高空作业平台上,加速度传感器与电动高空作业平台的ecu电信号连接。
13、进一步地,根据电机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a1,包括:
14、电动高空作业平台的ecu根据电机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a1;
15、计算公式为:
16、fd=-ff+fi+f
17、=-mgfcosα+mgsinα+ma1
18、其中,fd为电机制动力,ff为电动高空作业平台行驶所受摩擦阻力,fi为电动高空作业平台重力在坡度方向的分力,fa为电动高空作业平台的加速驱动力,m为电动高空作业平台的质量,g为重力加速度,f为滚动阻力系数。
19、进一步地,根据电机制动力和减速机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a2,包括:
20、电动高空作业平台的ecu根据电机制动力和减速机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a2;
21、计算公式为:
22、fd+fj=-ff+fi+f
23、=-mgfcosα+mgsinα+ma2
24、其中,fd为电机制动力,fj为减速机制动力,ff为电动高空作业平台行驶所受摩擦阻力,fi为电动高空作业平台重力在坡度方向的分力,fa为电动高空作业平台的加速驱动力,m为电动高空作业平台的质量,g为重力加速度,f为滚动阻力系数。
25、进一步地,电机制动包括:
26、电动高空作业平台的ecu发送制动命令给电机驱动器;
27、电机驱动器输出高电位信号至电磁抱闸的电磁线圈;
28、电磁线圈产生电磁力使铁芯吸合,带动电磁抱闸完成制动;
29、其中,ecu、电机驱动器和电磁抱闸电信号连接,电磁抱闸安装在电机内。
30、进一步地,减速机制动包括:
31、电动高空作业平台的ecu发送制动命令给液压制动主缸;
32、液压制动主缸将制动液输送至减速机内的制动器,完成制动;
33、其中,ecu和液压制动主缸电信号连接,制动器内置在减速机内,液压制动主缸通过油管输送制动液至制动器。
34、进一步地,当爬坡角度α>电动高空作业平台最大允许爬坡角度a,电动高空作业平台限制行走并执行制动。
35、进一步地,a为45°。
36、与现有技术相比,本发明所达到的有益效果:
37、1、本发明提出一种坡度+加速度匹配安全控制方法,根据车辆电机、减速机的最大制动力和所处坡度计算出车辆允许的最大下坡加速度,再将计算结果与实际车辆下坡加速度比较,判断车辆是否出现电机失速进而执行复合制动命令,避免电机超负荷运行,避免车辆发生溜坡,保证车辆安全爬坡。
38、2、本发明提出一种防溜坡电机+减速机冗余制动的安全制动架构,除电机本身自带的制动器,减速机内部嵌入液压制动器,在电机制动力不足的情况下,启动减速机制动,提高车辆爬坡安全、稳定性。
技术特征:
1.一种电动高空作业平台爬坡安全控制方法,其特征在于,包括:
2.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,获取电动高空作业平台的爬坡角度α,包括:
3.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,获取电动高空作业平台的下坡加速度a,包括:
4.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,根据电机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a1,包括:
5.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,根据电机制动力和减速机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a2,包括:
6.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,电机制动包括:
7.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,减速机制动包括:
8.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,当爬坡角度α>电动高空作业平台最大允许爬坡角度a,电动高空作业平台限制行走并执行制动。
9.根据权利要求1所述电动高空作业平台爬坡安全控制方法,其特征在于,a为45°。
技术总结
本发明公开了一种电动高空作业平台爬坡安全控制方法,包括:获取电动高空作业平台的爬坡角度α和下坡加速度a;根据电机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a1,根据电机制动力和减速机制动力计算出爬坡角度α下电动高空作业平台最大允许下坡加速度a2;当a<a1时,执行电机制动,当a1≤a<a2时,执行电机制动和减速机制动,当a≥a2时,电动高空作业平台停止加速,执行电机制动和减速机制动。本发明解决了电动高空作业平台爬坡或坡上作业出现的溜坡、电机失速问题。
技术研发人员:刘肖,王晓飞,靳翠军,程婷,唐玉晓,潘辉
受保护的技术使用者:徐工消防安全装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!