异构无人机集群多任务分配与航迹规划联合优化方法
本发明涉及雷达信号处理技术,具体涉及一种异构无人机集群多任务分配与航迹规划联合优化方法。
背景技术:
1、异构无人机集群由多种不同类型的无人机组成,可以适应不同环境和任务需求,利用信息交互与反馈、激励与响应,实现相互间行为协同,完成更加复杂和高效的飞行任务,即使集群中少部分无人机发生故障,其他无人机仍然能够继续完成任务。因此,可以对异构无人机集群的航程、价值收益、被威胁概率进行优化设计,形成满足特定任务需求的目标函数。此外,通过对异构无人机集群航迹进行在线规划,不断优化其实时前进方向,可以有效提升多任务侦察打击作战效能。
2、针对多任务场景,在异构无人机集群任务载荷、航程和任务需求的约束下,需要对任务分配与航迹规划进行联合优化设计,使得航程最小化,价值收益最大化,被威胁概率最小化。
3、目前,对无人机集群任务分配与航迹规划方面的研究成果较为丰富,然而大部分研究将任务分配与航迹规划分别求解,削弱或忽略了二者之间的耦合性。在任务分配时,仅考虑任务本身的时序约束和任务之间的相互影响关系,而不考虑无人机自身运动学约束、环境威胁等;航迹规划则将任务分配的输出作为其输入,只考虑无人机自身约束、环境威胁等。这样的处理方式降低了问题的复杂度,但在实际作战中无法满足需求。
技术实现思路
1、发明目的:本发明的目的是提供一种异构无人机集群多任务分配与航迹规划联合优化方法。
2、技术方案:本发明的异构无人机集群多任务分配与航迹规划联合优化方法,包括以下步骤:
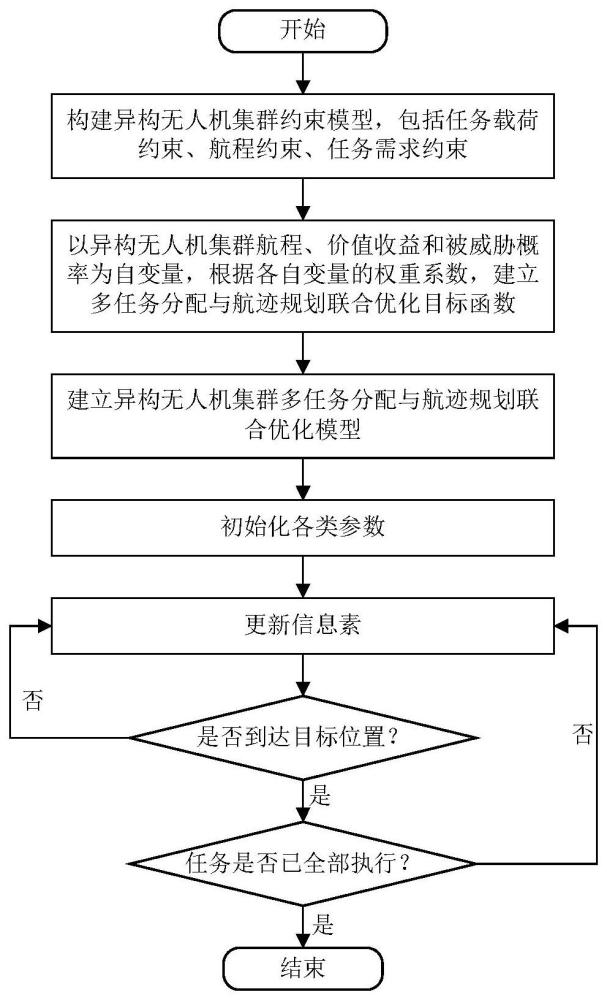
3、构建异构无人机集群约束模型,包括任务载荷约束、航程约束、任务需求约束;以异构无人机集群航程、价值收益和被威胁概率为自变量,根据各自变量的权重系数,建立多任务分配与航迹规划联合优化目标函数;建立异构无人机集群多任务分配与航迹规划联合优化模型,该优化模型通过协同优化无人机航程、价值收益和被威胁概率,在满足任务载荷、航程和任务需求约束条件下,最大限度地提升无人机集群的作战效能;最后采用改进的蚁群算法对优化模型进行求解;
4、其中,改进的蚁群算法在蚁群算法的基础上引入轮盘赌选择原则和精英策略,首先将群体中每个个体被选择的概率的和组成一个轮盘,其中每个个体被选择的概率相同,最后计算累积概率,根据累积概率用rand()产生一个[0,1]之间的随机数r,根据r所在区间确定选择的个体;其次在每次循环结束时将精英蚂蚁的解取出来,对精英蚂蚁的路径进行局部信息素调整,使得目前为止找出的最优解在下一次循环中更具吸引力。
5、进一步的,任务载荷约束表示为:
6、
7、其中,表示无人机ui执行任务tj所需要的载荷资源;表示无人机ui携带的总任务载荷资源;ta表示无人机ui的任务集合;
8、航程约束表示为:
9、
10、其中,表示无人机ui执行任务tj所耗费的航程;表示无人机ui的总任务航程;
11、任务需求约束表示为:
12、
13、且
14、
15、其中,xij表示任务决策变量,n表示异构无人机集群中包含的无人机数量。
16、进一步的,建立的多任务分配与航迹规划联合优化目标函数f为:
17、
18、其中,δ1、δ2、δ3分别表示异构无人机集群航程、价值收益和被威胁概率的权重系数;ltmax表示所有无人机航程中的最大值;vtmax表示所有无人机执行任务获得的价值收益中的最大值;ptmax表示所有无人机受到威胁概率中的最大值;lt表示无人机ui执行任务的总航程;vt表示无人机ui执行任务获得的价值收益之和;pt表示无人机ui执行任务的过程中受到威胁的概率。
19、更进一步的,无人机ui执行任务的过程中受到威胁的概率pt表示为:
20、
21、其中,ω1表示无源威胁权重系数;ω2表示有源威胁权重系数;ta表示无人机ui的任务集合;tj表示m个任务组成的总任务集合t中第j个任务;
22、pp表示无人机进入无源威胁区域的概率:
23、
24、pa表示无人机受到有源威胁的概率:
25、
26、其中,rij表示无人机ui与任务tj之间的距离;rj表示任务tj的作用范围;ka表示比例常数,与有源威胁和无人机之间的距离有关。
27、进一步的,建立的异构无人机集群多任务分配与航迹规划联合优化模型为:
28、
29、
30、其中,f为多任务分配与航迹规划联合优化目标函数;lt表示第i个无人机ui执行任务的总航程;vt表示第i个无人机ui执行任务获得的价值收益之和;pt表示第i个无人机ui执行任务的过程中受到威胁的概率;δ1、δ2、δ3分别表示异构无人机集群航程、价值收益和被威胁概率的权重系数;ltmax表示所有无人机航程中的最大值;vtmax表示所有无人机执行任务获得的价值收益中的最大值;ptmax表示所有无人机受到威胁概率中的最大值;xij表示任务决策变量;n表示异构无人机集群中包含的无人机数量;表示第i个无人机ui执行任务tj所需要的载荷资源;表示第i个无人机ui携带的总任务载荷资源;ta表示第i个无人机ui的任务集合;tj表示m个任务组成的总任务集合t中第j个任务。
31、进一步的,将轮盘赌选择原则引入蚁群算法中,具体为:
32、群体中每个个体被选择的概率p(xi)为:
33、
34、其中,xi为个体,i=1,2,...,ant,ant为蚂蚁个数,f(xi)为个体xi的适应度值,由p(x1)+p(x2)+...+p(xant)=1组成一个轮盘。
35、进一步的,将精英策略引入蚁群算法中,其中,信息素调整参数如下:
36、
37、其中,表示精英蚂蚁引起节点m与n之间的信息素增量;tbest表示组成最优路径的节点集;lbest表示截至目前找到的最优解的路径长度;q表示信息素增强系数;e表示调整参数,与精英路径的长度有关。
38、基于相同的发明构思,本发明的异构无人机集群多任务分配与航迹规划联合优化系统,包括:
39、约束模型构建模块,用于构建异构无人机集群约束模型,包括任务载荷约束、航程约束、任务需求约束;
40、目标函数建立模块,用于以异构无人机集群航程、价值收益和被威胁概率为自变量,根据各自变量的权重系数,建立多任务分配与航迹规划联合优化目标函数;
41、优化模型构建模块,用于建立异构无人机集群多任务分配与航迹规划联合优化模型,该优化模型通过协同优化无人机航程、价值收益和被威胁概率,在满足任务载荷、航程和任务需求约束条件下,最大限度地提升无人机集群的作战效能;
42、模型求解模块,用于采用改进的蚁群算法对优化模型进行求解;
43、其中,改进的蚁群算法在蚁群算法的基础上引入轮盘赌选择原则和精英策略,首先将群体中每个个体被选择的概率的和组成一个轮盘,其中每个个体被选择的概率相同,最后计算累积概率,根据累积概率用rand()产生一个[0,1]之间的随机数r,根据r所在区间确定选择的个体;其次在每次循环结束时将精英蚂蚁的解取出来,对精英蚂蚁的路径进行局部信息素调整,使得目前为止找出的最优解在下一次循环中更具吸引力。
44、基于相同的发明构思,本发明的一种异构无人机集群多任务分配与航迹规划联合优化设备,所述设备包括:
45、存储有可执行程序代码的存储器;
46、与所述存储器耦合的处理器;
47、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如上述的异构无人机集群多任务分配与航迹规划联合优化方法。
48、基于相同的发明构思,本发明的一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行如上述的异构无人机集群多任务分配与航迹规划联合优化方法。
49、有益效果:与现有技术相比,本发明的异构无人机集群多任务分配与航迹规划联合优化方法,考虑二维威胁环境中异构无人机之间相互协调配合,对空间上分散部署的多个任务进行侦察打击;构建了约束模型;在此基础上,定义包含无人机航程、价值收益和被威胁概率的目标函数;以任务载荷、航程和任务需求为约束条件,以最小化航程、最大化价值收益和最小化被威胁概率为优化目标,建立异构无人机集群多任务分配与航迹规划联合优化模型,对无人机航程、价值收益和被威胁概率进行协同优化设计,以证明所提方法的优越性;通过对多任务场景中异构无人机集群航程、价值收益和被威胁概率等参数进行协同优化,在满足任务载荷、航程和任务需求的约束条件下,实现了较优的异构无人机集群多任务分配和较优的航迹规划,最大限度地提升无人机集群的作战效能。
- 还没有人留言评论。精彩留言会获得点赞!