一种适用于飞行器集群多目标观测与分配的方法
本发明涉及飞行器自主拦截/碰撞的关键技术,包括多视角信息整合、目标估计、蒙特卡罗定位、任务分配、自主拦截、自主碰撞。特别是引入了基于蒙特卡洛定位的集群状态估计和拓展匈牙利分配方法,以解决飞行器拦截/碰撞任务中的位置估计和任务分配问题。这涵盖了多视角处理、目标估计、蒙特卡罗定位、任务分配、自主拦截、自主碰撞等,旨在提高自主飞行器拦截/碰撞任务的成功率。
背景技术:
1、近年来,无人机,通俗地称为飞行器,在监视、侦察、交付和娱乐等各个领域迅猛发展。然而,这种扩张也凸显了对有效对策的紧迫需求,以应对未经授权或恶意飞行器操作可能带来的潜在安全威胁。针对这一不断增加的担忧,飞行器拦截/碰撞的概念在航空航天防御战略领域变得至关重要。
2、协同飞行器集群拦截/碰撞的基本理念在于,它能够提高拦截/碰撞操作的总体成功率,同时将单一平台拦截/碰撞扩展到飞行器集群情景。协同拦截/碰撞中,多个平台协同工作,不仅增加了成功中和目标飞行器的机会,还有助于管理在对抗性无人机集群提出重大挑战的情景下进行的复杂交战。
3、本发明采用陀螺仪和单目摄像头作为飞行器的感知传感器。捷联单目摄像头融合的拦截/碰撞效果在我们以前的工作中得到了验证。捷联单目摄像头融合有助于拦截/碰撞飞行器的紧凑性和小型化,以提高其灵活性。然而,单目摄像头感知缺乏目标的深度信息,通常使用的方法可以归类为几何方法和深度学习深度估计方法。但它们需要事先了解目标的实际尺寸,或者目标需要在训练数据中存在,这使得它们在估计未包含的目标时不准确。
4、在集群对抗情境中,一个潜在的挑战是飞行器数量与目标数量之间的潜在不匹配。直接使用整数规划来解决优化问题在计算上非常昂贵,难以保证实时响应。与此同时,基于共识的拍卖算法提供了一种替代方法,需要飞行器集群之间的多次通信。但需要注意的是,这种方法对带宽和飞行器集群的拓扑结构提出了更高的要求。
5、解决与飞行器拦截/碰撞相关的多方面挑战需要全面了解拦截/碰撞飞行器和目标飞行器之间错综复杂的动态关系。在这一努力中,两个关键方面突显出来作为重要挑战:(1)从单目摄像头精确估计目标的三维位置。(2)实时分配多个飞行器以与多个目标互动。
6、综合考虑这些挑战,成功实现飞行器拦截/碰撞任务需要集中关注如何提高目标的三维位置估计准确性以及如何有效地分配多个拦截/碰撞飞行器来应对多个目标,尤其是在集群对抗情境中。这涉及到计算机视觉、机器学习、优化算法和协同控制等多个领域的深入研究,以确保拦截/碰撞任务的高效和成功执行。
技术实现思路
1、本发明提出了一种协同拦截/碰撞方案,用于应对多个入侵的空中目标,将以往的单一目标拦截/碰撞方法扩展到多目标领域,从而提高了综合成功率。本发明引入了基于蒙特卡洛定位的集群状态估计和扩展匈牙利算法,作为支持协同拦截/碰撞的关键技术。本发明验证了算法在机载感知和控制下的有效性,巩固了其在实际应用中的可行性。这些贡献共同推动了多目标拦截/碰撞技术的发展,为有效应对多目标入侵威胁提供了重要的工具和方法。
2、首先介绍与本发明相关的飞行器运动模型、目标运动模型和相机成像模型。利用这些模型,本发明对拦截/碰撞飞行器和目标进行了建模。此外,本发明还提出了集群状态模型、测量模型(包括imu噪声测量模型和图像延迟测量模型)目标分配模型,进行了集群状态估计和任务分配问题的研究。
3、坐标系:对于拦截/碰撞飞行器集群中的第i架飞行器,本发明使用了四个坐标系,如图1所示,包括:
4、·{e}={oe-xeyeze}是地球固定坐标系(efcs),用于表示全局惯性系统中飞行器和目标的位置和速度;
5、·{bi}={obi-xbiybizbi}是第i架飞行器的机体坐标系(bcs),用于表示飞行器当前姿态的变量;
6、·{ci}={oci-xciycizci}是第i架飞行器的相机坐标系(ccs);
7、·{si}=s2是第i架飞行器的图像坐标系(ics),用于表示图像平面中目标特征的图像位置;
8、scs中的目标特征都位于一个2-球上。2-球的定义如下:
9、
10、矩阵表示坐标系f1到f2的旋转矩阵,其中3-d特征正交群定义如下:
11、
12、飞行器运动模型:拦截/碰撞飞行器的姿态由旋转矩阵表示,飞行器运动使用飞行控制刚体模型表示,如下所示:
13、
14、其中表示飞行器在efcs下的位置;表示efcs下的速度矢量;m是飞行器的质量;g是本地重力加速度,g=[0 0 g]t;是飞行器在efcs中的可控力;是bcs下的角速度;矩阵[bω]×是一个反对称矩阵,是角速度bω的叉乘映射。
15、叉乘映射[·]×:的定义如下,使得[x]×y=x×y,以及对于任意叉乘映射的逆映射由vex映射vex(·)表示:其中3×3反对称矩阵集合对于叉乘映射和vex映射可总结为
16、
17、对于多旋翼拦截/碰撞飞行器,可控力由螺旋桨的推力产生,如下所示:
18、
19、其中0≤f≤fm,fm是最大推力;rf∈so(3)是将推力矢量转换为bcs中obzb轴的旋转矩阵;
20、对于飞行器,rf是常数,因为螺旋桨以固定方向相对机体提供推力,而对于倾转旋翼飞机,它是可变的。矢量e3是3×3单位矩阵i的第三列,i=[e1 e2 e3],e3=[0 0 1]t。
21、目标运动模型:目标运动使用质点模型表示,如下所示:
22、
23、其中和分别表示目标在efcs下的位置、速度和推力加速度;噪声是零均值的高斯随机变量。
24、相机成像模型:如图1所示,透视投影执行从3d空间到图像球体的映射:假设ccs的原点与bcs的原点重合。即它们的平移向量且旋转矩阵是常数。本发明使用的摄像机与机体一体化,当摄像机与目标接触时,即视为成功拦截/碰撞。因此,光轴与飞行器头部方向存在恒定的旋转设cp为相机坐标系下可见的目标点,表示为相机坐标系中的向量,相机观测到的图像点表示为sp,通过重新缩放到相机的图像表面s2上得到。我们考虑一个带有球形图像平面的相机,因此,
25、
26、其中r=||cp||是目标的相对深度。在这里,使用球坐标表示目标成像特征点运动解决了传统的平面成像模型无法表示目标位于相机后方时的特征点问题。
27、飞行器运动模型和相机成像模型描述了单个拦截/碰撞飞行器的运动和感知,目标运动模型描述了单个目标的运动。下文中,本发明通过描述飞行器集群与目标集群之间关系的集群状态模型来描述协同拦截/碰撞任务。
28、拦截/碰撞集群和敌对集群:让和分别表示拦截/碰撞群中的飞行器集合和敌对集群中的入侵者集合,其中isi,i=1,…,n表示第i个拦截/碰撞飞行器,hsj,j=1,…,m表示第j个入侵者。拦截/碰撞飞行器集群和敌对集群的规模分别为n和m。考虑到n≠m,也就是说,当拦截/碰撞集群的规模与敌对集群的规模不匹配时,可以称之为多任务分配问题,可以分为以下两种情况。当n<m时,我们的拦截/碰撞飞行器配备了可重复使用的工具,如网枪。一个拦截/碰撞飞行器可以分配给多个入侵者。当n>m时,多个拦截/碰撞飞行器被分配给同一个入侵者,以提高拦截/碰撞成功率并充分利用资源。
29、集群状态模型:每个拦截/碰撞飞行器都维护着飞行器集群和目标集群的状态,估计全局信息以便后续的任务分配。飞行器的状态表示为:
30、
31、包括飞行器的旋转矩阵efcs中的位置ep和速度向量ev、陀螺仪偏置以及加速度计偏置所提出的状态表示xi位于流形m内,根据飞行器运动模型(3),拦截/碰撞飞行器i的状态方程可以表示为:
32、
33、其中运动命令是带噪声的imu测量。状态转移函数f(·)将前一状态和运动命令映射到从时间tk-1到时间tk的预测状态,类似地,目标的状态定义为:
34、
35、根据目标运动模型(6),目标j的状态方程可以表示为:
36、
37、集群状态被表示为:
38、
39、imu噪声测量模型:imu(惯性测量单元)提供了在bcs下的陀螺仪角增量和加速度计速度增量测量。将这些测量与飞行器运动模型(3)结合,可以得到状态和ev的递归表达式。·旋转矩阵的导数,即角速度bω,可以从陀螺仪测量中获得,如下所示:
40、bω=ωgyr-bgyr-ngyr (13)
41、其中,陀螺仪测量噪声ngyr是零均值的高斯随机变量;偏置bgyr遵循维纳过程,如下所示:
42、
43、·速度ev的导数,即加速度ea,可以从加速度计测量值中获得,如下所示:
44、
45、其中,加速度计测量噪声nacc是零均值的高斯随机变量;偏置bacc遵循维纳过程,如下所示:
46、
47、图像延迟测量模型:图像处理提供了目标点的图像坐标,得到了图像测量spm。由于相机成像、图像处理和网络传输都需要时间,所以得到的测量值是一段时间前的数据。假设基于imu更新频率,测量的延迟是d个周期,并且延迟时间td>0是已知的。那么在时间t的图像测量可以表示为
48、spm,k=spk-d+nimg (17)
49、其中,图像测量噪声nimg是零均值的高斯随机变量。请注意,这个飞行器的延迟时间td包括相机成像和图像处理时间,可以从相机参数和图像处理算法中的计时器获得。其他飞行器的延迟时间还包括网络传输时间,可以从消息时间戳计算得出。
50、目标分配模型:该问题涉及到n架拦截/碰撞飞行器,表示为其中a={0,1}m表示有限的纯策略集合。用si∈a表示isi的纯策略,用s=[s1,…,sm]t表示拦截/碰撞飞行器的纯策略配置。多目标分配问题的目标是最小化成本。在这个目标分配问题中,成本矩阵c=(cij)n×m由飞行器和目标之间的距离决定,cij=||epi-eptj||,i=1,…,n,j=1,...,m。因此,最优目标分配问题可以表示为
51、
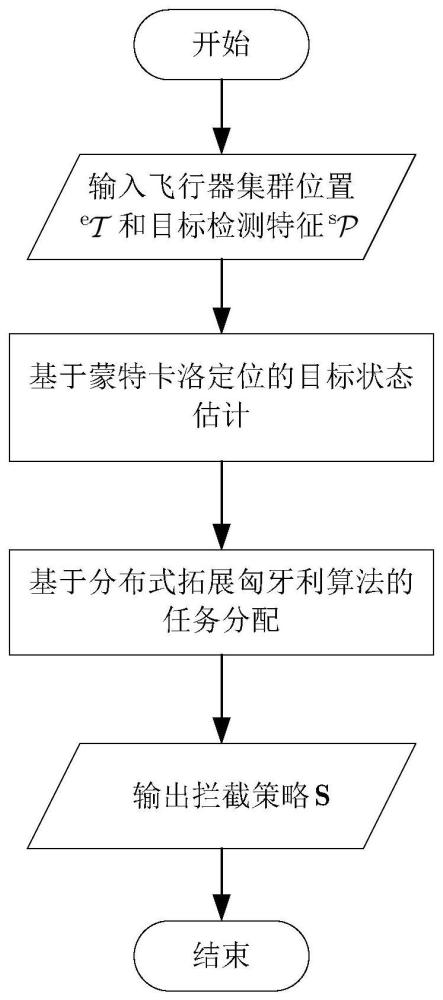
52、本发明提出了基于蒙特卡洛定位的集群状态估计和扩展匈牙利算法来解决协同拦截/碰撞的方法,其规划流程图如图2所示,在之前定义的基础上,其实现步骤具体如下:
53、步骤一:基于蒙特卡洛定位的集群状态估计
54、在给定时间tk上rgb图像上检测到的目标位置spm,k,以及时间tk-1到时间tk之间的运动估计uk,多视角估计器(mte)估计了拦截/碰撞飞行器在时间tk的状态χk。具体来说,mte使用粒子滤波器来估计后验概率其中z0:k和u0:k分别是从初始时间到当前时间tk收集的图像和运动测量的集合。
55、s11、集群状态表示
56、用k表示时间tk上imu测量的索引。根据集群状态模型,飞行器i的连续状态方程(9)可以在imu采样周期δt内离散化为:
57、
58、其中,函数f定义如下:
59、
60、类似地,目标j的连续状态方程(11)可以离散化为
61、xtj,k=xtj,k-1+ft(xtj,k-1)δt (21)
62、其中,函数ft定义如下:
63、
64、将后验分布建模为一组l个粒子的加权集合:
65、
66、其中,是第l个粒子的状态,是相应的权重。然后,粒子滤波器在每个时间点更新粒子集合(当接收到新的图像和测程测量时),并应用四个步骤:预测、更新、重采样和前向传播。
67、s12、飞行器运动预测
68、输入采样imu信息然后根据imu噪声测量模型进行状态更新如下所示:
69、
70、
71、
72、
73、其中,函数sample(σ2)在零均值σ方差的高斯分布中随机采样一个点。在本步骤中
74、
75、s13、飞行器量测更新
76、
77、其中,函数prob(a,σ2)计算其参数a在方差为σ2的零中心高斯分布下的概率,测量量spm由相机成像模型和图像延迟测量模型计算得到。式(29)比较收集到的目标特征spm与由飞行器运动预测的目标特征spk-d,并为两者不匹配的粒子分配较低的权重。
78、s14、蒙特卡洛定位
79、在更新步骤之后,我们使用带有替换的方式从集合中重新采样l个粒子,其中每个粒子都以概率被采样。设新的集合为
80、s141、对于每个粒子做如下更新:
81、
82、
83、
84、s142、对于每个粒子,以概率从中选择i,将加入到中。
85、s15、前向传播
86、对于延迟的图像测量,在时刻tk-d通过
87、
88、获得的概率分布多次应用带有拦截/碰撞飞行器运动的预测步骤,将概率分布更新到当前时刻tk:
89、
90、其中,dσ是md的微分面积,包括坐标χk-1,χk-2,...,χk-d。
91、步骤二:基于分布式拓展匈牙利算法的任务分配
92、s21、构建任务列表和工作者列表
93、将hs和is重新定义为任务列表(task list)和工作者列表(worker list)。根据目标分配模型,对于重要的目标,它们被细分为多个任务,可以分配给多个工作者。对于有能力进行拦截/碰撞的飞行器,我们将其构建为多个工作者,可以执行多个任务。具体的构建方法在下一小节中介绍。和分别代表任务列表集合和工作者列表集合。
94、s211、判断的大小。若则跳转步骤s212;若则跳转步骤s213;若则跳转步骤s214。
95、s212、
96、s213、
97、s214、
98、s22、拓展匈牙利算法
99、s221、输入拦截/碰撞者集群和目标集群的位置集合。
100、s222、根据拦截/碰撞集群和敌对集群定义创建集合
101、s223、跳转步骤s21构建任务列表和工作者列表,得到
102、s224、根据步骤一中估计的集群状态,计算代价矩阵。cij=||epi-eptj||,i=1,…,n,j=1,,m。
103、s225、使用匈牙利算法对构建的任务列表、工作者列表和代价矩阵计算最佳匹配。
104、s226、输出分配的目标位置集合。
105、本发明引入了基于蒙特卡洛定位的集群状态估计和扩展匈牙利算法,作为支持协同拦截/碰撞的关键技术。本发明验证了算法在机载感知和控制下的有效性,巩固了其在实际应用中的可行性。这些贡献共同推动了多目标拦截/碰撞技术的发展,为有效应对多目标入侵威胁提供了重要的工具和方法。
- 还没有人留言评论。精彩留言会获得点赞!