轨道虚拟场的航天器姿态主动自稳控制方法与流程
本发明属于航天器姿态控制,具体涉及轨道虚拟场的航天器姿态主动自稳控制方法。
背景技术:
1、目前航天器姿轨控设计是依据星敏、太敏、陀螺等星上测量仪器的实时测量数据监测,发现航天器的姿态发生变化,再经星载计算机的计算,将需修正的量输出至执行机构如磁力矩器、推力器等。这种方法对测量仪器的测量值的准确度依赖性较强,若星上测量装置受磁场、单粒子等干扰,测量出现偏差,则航天器姿态、位置很容易出现偏差,影响载荷使用。
技术实现思路
1、本发明的目的是提供轨道虚拟场的航天器姿态主动自稳控制方法,解决了现有的控制方法对测量仪器的测量值依赖性较强,导致航天器姿态、位置很容易出现偏差的问题。
2、本发明所采用的技术方案是,轨道虚拟场的航天器姿态主动自稳控制方法,具体按照以下步骤实施:
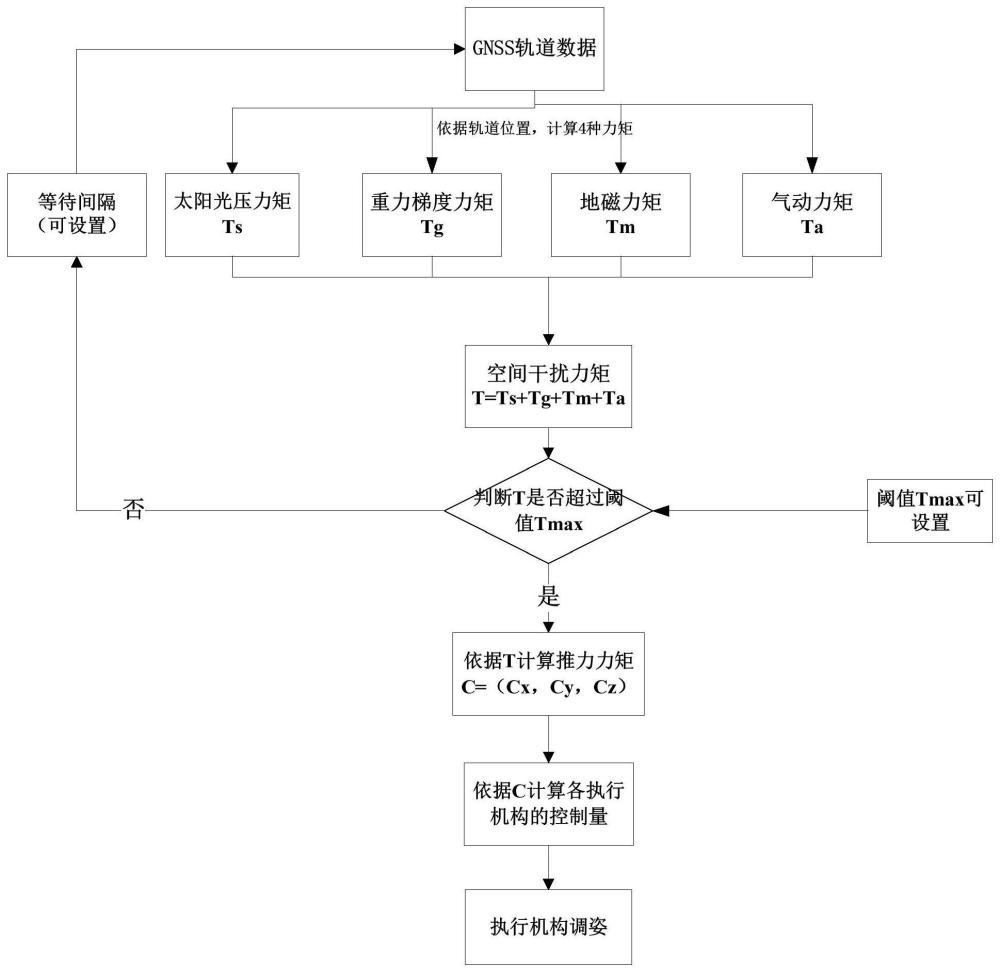
3、步骤1、利用当前航天器的gnss数据,外推航天器轨道位置、速度;
4、步骤2、根据外推的航天器轨道位置、速度和航天器的相关常数,计算航天器的空间干扰力矩τ;
5、步骤3、判断空间干扰力矩τ是否到达门限阈值,确定航天器需要进行主动姿态调整;
6、步骤4、通过空间干扰力矩τ,计算航天器姿态调整策略;
7、步骤5、依据航天器姿态控制航天器在特定时刻进行姿态调整。
8、步骤1具体过程为:
9、当前航天器gnss接收机从gnss系统获得准确的utc授时信息t和航天器当前gnss轨道位置、速度后,进行轨道外推,外推时长为δt,得到推期航天器外间的位置、速度。
10、步骤2中空间干扰力矩包括太阳光压力矩、重力梯度力矩、地磁力矩和气动力矩。
11、步骤2具体过程为:
12、计算太阳光压力矩τs:
13、在航天器本体坐标中太阳光压产生的力矩τs=(τsxτsyτsz)统一表示为:
14、
15、其中,kt为切向光压系数,kn为法向光压系数,σ为太阳光与帆板法向夹角,ηs为航天器天顶对太阳的角距,ξ为帆板转轴偏离的方位角,ω0为航天器运动角速度,rx、rz分别为太阳帆板转轴在航天器本体系x、z轴方向的偏离量,ry1、ry2分别为单个帆板中心沿航天器本体y轴方向的距离;
16、计算重力梯度力矩τg:
17、地球中心引力场对航天器产生的重力梯度力矩不仅与姿态有关,更与航天器的质量特性有密切关系,在航天器小量偏离轨道系零姿态的情况下,重力梯度力矩τg=(tgx tgytgz)表示为:
18、
19、其中,为航天器的惯量张量,由地面测量得出,ψ,θ,分别为航天器的偏航、滚动和俯仰角;
20、计算地磁力矩τm:
21、根据外推航天器轨道位置确定航天器所在位置的地磁感应强度b;
22、航天器磁矩与地球磁场会相互作用并产生力矩,表示为:
23、τm=μm×β (3)
24、其中,μm为航天器的磁矩,且
25、
26、其中,be为地球磁矩总强度,θm是航天器向径与地磁赤道的夹角,er为航天器位置矢量单位向量,zm为磁偶极子矢量单位向量;
27、计算气动力矩τa:
28、根据外推航天器轨道速度确定航天器迎风面相对大气的速度矢量vs;
29、对于一定高度范围的航天器,气动力矩τa是主要的干扰力矩,假设入射分子在碰撞中丧失其全部能量,则:
30、τa=ρs×fs (5)
31、其中,ρs为航天器迎风面的压力中心相对航天器质心的位置向量,且
32、
33、其中ρ是大气密度,s是航天器的迎风面积,n是与迎风面垂直的单位矢量,且
34、vs=vo-we×rs (7)
35、其中vo是航天器轨道速度,rs是航天器的地心位置矢量,航天器的地心位置矢量根据外推航天器轨道位置确定,we为地球自转的角速度矢量;
36、太阳光压力矩τs、重力梯度力矩τg、地磁力矩τm和气动力矩τa之和为航天器的空间干扰力矩,表示为:
37、τ=τs+τg+τm+τa。
38、步骤3具体过程为:
39、设置门限阈值|τmax|,判断空间干扰力矩|τ|是否到达门限阈值|τmax|,若|τ|≥|τmax|,需要进行姿态调整,进入步骤4;否则,不需要进行姿态调整,返回步骤1。
40、步骤4具体过程为:
41、将轨道坐标系下的空间干扰力矩τ转换为航天器本体系下的空间干扰力矩;
42、在航天器没有动量控制装置的情况下,完全依靠小推力进行姿态稳定控制,航天器系统的角动量hs表示为:
43、hs=ιω (8)
44、其中,i表示轨道坐标系下航天器的惯量张量,w表示航天器的角速度矢量;
45、航天器姿态动力学方程为:
46、
47、取航天器的主惯量轴为航天器本体坐标系,此时惯量阵为对角阵,i=diag(ix iyiz);m表示在航天器本体坐标系下航天器所受力矩矢量;
48、航天器在轨道坐标系中的姿态由滚动角俯仰角θ和偏航角ψ表示,在三轴稳定性控制中,航天器姿态角均为小量,此时姿态矩阵表示为:
49、
50、航天器轨道坐标系在空间中的转速为(0 -ω0 0),则航天器的转速在航天器本体坐标系中表示为:
51、
52、将ω的表达式带入航天器姿态动力学方程中,得到基于微小推力的姿态稳定动力学方程为:
53、
54、其中,c=(cx cy cz)为星上小量控制力矩;取星上小量控制力矩c为航天器本体系下的空间干扰力矩。
55、步骤5具体过程为:根据步骤4得到的航天器姿态调整策略驱动航天器小推力器姿态调整。
56、本发明的有益效果是:
57、本发明轨道虚拟场的航天器姿态主动自稳控制方法,根据航天器星载gnss数据等轨道信息,分别计算航天器在后续轨位所受的太阳光压力矩、重力梯度力矩、地磁力矩和气动力矩,当预计空间干扰合力矩到达预先设定的最大阈值时,航天器开启姿态主动稳定,将轨道坐标系下的力矩转换至航天器本体坐标系后,利用执行机构主动将空间干扰力矩平衡。该方法实现了在无测量机构或测量机构不可信的时候,完成姿轨控的航天器控制;对于超低成本微小航天器,可实现压缩成本的同时完成对其姿态控制。
技术特征:
1.轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,具体按照以下步骤实施:
2.根据权利要求1所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤1具体过程为:
3.根据权利要求1所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤2中所述空间干扰力矩包括太阳光压力矩、重力梯度力矩、地磁力矩和气动力矩。
4.根据权利要求3所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤2具体过程为:
5.根据权利要求1所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤3具体过程为:
6.根据权利要求1所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤4具体过程为:
7.根据权利要求1所述轨道虚拟场的航天器姿态主动自稳控制方法,其特征在于,步骤5具体过程为:根据步骤4得到的航天器姿态调整策略驱动航天器小推力器姿态调整。
技术总结
本发明公开了轨道虚拟场的航天器姿态主动自稳控制方法,具体按照以下步骤实施:利用当前航天器的GNSS数据,外推航天器轨道位置、速度;根据外推的航天器轨道位置、速度和航天器的相关常数,计算航天器的空间干扰力矩Τ;判断空间干扰力矩Τ是否到达门限阈值,确定航天器需要进行主动姿态调整;通过空间干扰力矩Τ,计算航天器姿态调整策略;依据航天器姿态控制航天器在特定时刻进行姿态调整。本发明航天器姿态主动自稳控制方法实现了在无测量机构或测量机构不可信的时候,完成姿轨控的航天器控制;对于超低成本微小航天器,可实现压缩成本的同时完成对其姿态控制。
技术研发人员:安源,姜宇,邰能建,陈丹,杨彪,伍升钢,张琢,孔博,朱永杰,沈世禄
受保护的技术使用者:中国西安卫星测控中心
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!