一种激光切割数控系统的三维实体仿真构造的实现装置的制作方法
本发明涉及计算机技术,尤其涉及一种激光切割数控系统的三维实体仿真构造的实现装置。
背景技术:
1、目前,激光数控系统中普遍采用二维图形显示空间的运动轨迹,其存在的问题在于:图形可视性差,缺乏立体感,容易产生一些误解,并且难于向非专业技术人员展示,影响用户对加工运行动作的理解,从而影响生产效率。综上所述针对激光数控系统三维实体仿真,缺乏一种好的三维实体仿真构造方法,解决三维实体仿真构造和显示效率的问题。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种激光切割数控系统的三维实体仿真构造的实现装置。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种激光切割数控系统的三维实体仿真构造的实现方法,包括:
6、毛坯模型建立单元,用于根据voxel模型的构造方法和已知毛坯的长宽高信息,建立用于数控系统三维实体仿真的毛坯模型;
7、中间体模型获取单元,用于根据有效面绘制方式,绘制所述毛坯模型的外表面和有效切削面,得到中间体模型;
8、三维实体仿真构造获取单元,用于根据激光切割数控系统的刀具运动模式,获取所述中间体模型的切割包围体信息,将具有切割包围体信息的模型作为实现的三维实体仿真构造。
9、可选地,所述毛坯模型建立单元,具体用于,
10、根据voxel模型的构造方法将已知毛坯的长、宽、高分别以固定的显示精度在x轴、y轴和z轴上进行离散;nx、ny、nz分别为x轴、y轴以及z轴上以固定显示精度而离散的单元立方体个数;建立用于数控系统三维实体仿真的毛坯模型;n为大于等于0的整数;
11、毛坯模型的结构信息包括:作为最小单位元素的单元立方体、单元立方体的索引值key、上、下、前、后、左、右六个面的显示标志位、单元立方体是否发生切削的标志位。
12、可选地,中间体模型获取单元,具体用于,
13、初始化所述毛坯模型,获得所述毛坯模型用于显示的最外层的外表面;
14、根据毛坯模型的结构信息,判断每一个单元立方体是否发生切削;
15、针对当前单元立方体,若发生切削,则根据该当前单元立方体的索引值反算出与该当前单元立方体相邻的六个单元立方体;
16、根据毛坯模型的结构信息中反算出的六个单元立方体是否发生切削的信息,确定当前单元立方体的有效绘制面,
17、获得每一个单元立方体的有效绘制面作为有效切削面。
18、可选地,三维实体仿真构造获取单元,包括:
19、分别过刀尖点o2和刀轴顶点o1作垂直于xoy面的垂线,垂足分别为o”和o’,并连接两垂足;
20、过垂点o”作平行于x轴的平行线,同时过o’作垂直于o”o’的垂线,并与过o”点平行于x轴的平行线相交于点n;
21、过点o’做垂线垂直于o”n,垂足为m;
22、由已知参数刀尖点o2(x2,y2,z2)和刀轴矢量对刀轴顶点进行求解,可得到刀轴的顶点坐标为o1(x2+h·i,y2+h·j,z2+h·k);h为刀轴长度;
23、根据o1和o2的坐标分别可以直接得出o’和o”的坐标,即o'(x2+h·i,y2+h·j,z'),o”(x2,y2,z”),因为o’和o”在同一平面上,所以z'=z”,o’m和o”m的计算表达式:
24、
25、在平面o’o”n上,由o’m和o”m的值求出直线o”o’和直线o”n之间的夹角,该夹角的计算公式:
26、θ=arctan(j/i) (1.3)
27、在直角三角形o’o”n中,θ=θ',mn=tanθ'·o'm则点n的坐标为:n(x2+h·i+tanθ·h·j,y2,z');
28、计算n点坐标的目的在于需要求出垂直于平面o1o2o”o'的向量即该向量垂直于刀具包围体的左右侧表面;然后继续求解垂直于向量和相交所形成的平面的向量,即垂直于刀具包围体前后侧表面的向量;
29、设垂直于刀具包围体前后侧表面的向量为向量的计算公式:
30、
31、r为刀轴矢量的半径;
32、得到垂直于刀具包围体的前后、左右侧表面向量后,进行单位化,然后再对刀具包围体的八个顶点进行计算。
33、第二方面,本发明实施例还提供一种激光切割数控系统的三维实体仿真构造的实现方法,包括:
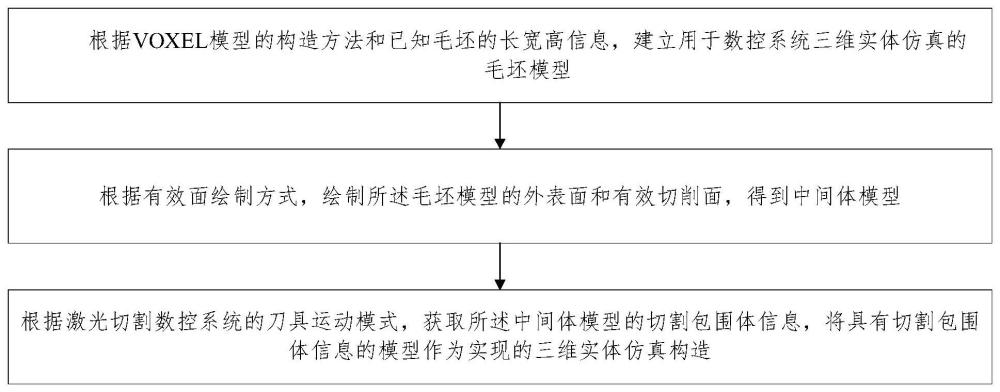
34、s10、根据voxel模型的构造方法和已知毛坯的长宽高信息,建立用于数控系统三维实体仿真的毛坯模型;
35、s20、根据有效面绘制方式,绘制所述毛坯模型的外表面和有效切削面,得到中间体模型;
36、s30、根据激光切割数控系统的刀具运动模式,获取所述中间体模型的切割包围体信息,将具有切割包围体信息的模型作为实现的三维实体仿真构造。
37、可选地,所述s10包括:
38、根据voxel模型的构造方法将已知毛坯的长、宽、高分别以固定的显示精度在x轴、y轴和z轴上进行离散;nx、ny、nz分别为x轴、y轴以及z轴上以固定显示精度而离散的单元立方体个数;建立用于数控系统三维实体仿真的毛坯模型;n为大于等于0的整数;
39、毛坯模型的结构信息包括:作为最小单位元素的单元立方体、单元立方体的索引值key、上、下、前、后、左、右六个面的显示标志位、单元立方体是否发生切削的标志位。
40、可选地,所述s20包括:
41、s21、初始化所述毛坯模型,获得所述毛坯模型用于显示的最外层的外表面;
42、s22、根据毛坯模型的结构信息,判断每一个单元立方体是否发生切削;
43、s23、针对当前单元立方体,若发生切削,则根据该当前单元立方体的索引值反算出与该当前单元立方体相邻的六个单元立方体;
44、s24、根据毛坯模型的结构信息中反算出的六个单元立方体是否发生切削的信息,确定当前单元立方体的有效绘制面,
45、s25、获得每一个单元立方体的有效绘制面作为有效切削面。
46、可选地,所述s23包括:
47、根据当前单元立方体的索引值,计算出该当前单元立方体关联的8个顶点,根据8个顶点中不同的顶点组合查找出相邻的每个具体的单元立方体表面。
48、可选地,所述s23包括:
49、假设任意一个单元立方体的索引值为voxel[k1+1][j1+1][i1+1],通过相邻查找算法搜索出该单元立方体关联的7个顶点的数组下标值;
50、
51、当前单元立方体上表面的顶点组合为voxel[k1+1][j1+1][i1+1],voxel[k1+1][j1+1][i1],voxel[k1+1][j1][i1],voxel[k1+1][j1][i1+1],绘制上表面的顶点组合结构;
52、当前单元立方体右表面的顶点组合为voxel[k1+1][j1+1][i1+1],voxel[k1+1][j1][i1+1],voxel[k1][j1][i1+1],voxel[k1][j1+1][i1+1],绘制右表面的顶点组合结构;
53、当前单元立方体下表面的顶点组合为voxel[k1][j1+1][i1],voxel[k1][j1][i1],voxel[k1][j1][i1+1],voxel[k1][j1+1][i1+1],绘制下表面的顶点组合结构;
54、当前单元立方体左表面的顶点组合为voxel[k1+1][j1+1][i1],voxel[k1+1][j1][i1],voxel[k1][j1][i1],voxel[k1][j1+1][i1],绘制左表面的顶点组合结构;
55、当前单元立方体前表面的顶点组合为voxel[k1+1][j1][i1],voxel[k1+1][j1][i1+1],voxel[k1][j1][i1],voxel[k1][j1][i1+1],绘制前表面的顶点组合结构;
56、当前单元立方体后表面的顶点组合为voxel[k1+1][j1+1][i1],voxel[k1+1][j1+1][i1+1],voxel[k1][j1+1][i1],voxel[k1][j1+1][i1+1],绘制后表面的顶点组合结构;
57、和/或,所述s24包括:
58、在确定当前单元立方体的各个面对应的顶点组合结构时,通过顶点组合结构所属单元立方体中各个面中是否发生切削的标志位确定是否发生切削的信息,进而实现当前单元立方体的有效绘制面。
59、可选地,所述s30包括:
60、s31、分别过刀尖点o2和刀轴顶点o1作垂直于xoy面的垂线,垂足分别为o”和o’,并连接两垂足;
61、s32、过垂点o”作平行于x轴的平行线,同时过o’作垂直于o”o’的垂线,并与过o”点平行于x轴的平行线相交于点n;
62、s33、过点o’做垂线垂直于o”n,垂足为m;
63、s34、由已知参数刀尖点o2(x2,y2,z2)和刀轴矢量对刀轴顶点进行求解,可得到刀轴的顶点坐标为o1(x2+h·i,y2+h·j,z2+h·k);h为刀轴的长度;
64、s35、根据o1和o2的坐标分别可以直接得出o’和o”的坐标,即o'(x2+h·i,y2+h·j,z'),o”(x2,y2,z”),因为o’和o”在同一平面上,所以z'=z”,o’m和o”m的计算表达式:
65、
66、s36、在平面o’o”n上,由o’m和o”m的值求出直线o”o’和直线o”n之间的夹角,该夹角的计算公式:
67、θ=arctan(j/i) (1.3)
68、s37、在直角三角形o’o”n中,θ=θ',mn=tanθ'·o'm则点n的坐标为:n(x2+h·i+tanθ·h·j,y2,z');
69、s38、计算n点坐标的目的在于需要求出垂直于平面o1o2o”o'的向量即该向量垂直于刀具包围体的左右侧表面;然后继续求解垂直于向量和相交所形成的平面的向量,即垂直于刀具包围体前后侧表面的向量;
70、s39、设垂直于刀具包围体前后侧表面的向量为向量的计算公式:
71、
72、s310、得到垂直于刀具包围体的前后、左右侧表面向量后,进行单位化,然后再对刀具包围体的八个顶点进行计算。
73、第三方面,本发明实施例还提供一种激光切割数控系统,包括:存储器和处理器,所述存储器存储计算机程序,所述处理器执行所述计算机程序,并执行上述第二方面任一所述的一种激光切割数控系统的三维实体仿真构造的实现方法的步骤。
74、(三)有益效果
75、采用本发明的方法在激光数控系统中实现了切割动作的实体仿真,解决了二维图形显示空间轨迹的可视性差、立体感缺乏、向非技术人员展示困难,用户理解困难及生产效率受影响等问题,提升了激光切割数控系统的使用体验和加工生产效率。
- 还没有人留言评论。精彩留言会获得点赞!