车辆轨迹跟踪控制器参数自学习方法及装置
本技术涉及自动驾驶,特别涉及一种车辆轨迹跟踪控制器参数自学习方法及装置。
背景技术:
1、运动控制是自动驾驶系统的核心和必不可少的模块,传统的运动控制算法种类有很多,例如pid控制、预瞄控制、前向预览控制等,但存在一个普遍的问题,即算法参数的调整十分繁琐、耗时。
2、以pid算法为例,如图1所示,其包含比例调节系数kp、积分调节系数ki和微分调节系数kd,且系数对速度的变化敏感,当速度发生一定变化后需要对参数进行调整,若考虑30个车速数据,则需人工确定九十个参数,需要大量的人力和时间进行参数标定;以前向预览控制为例,其具有典型的前馈-反馈结构,通常反馈系数为4个,前馈系数30-80个(与前向预测时域选择有关),若考虑30个车速数据,则需调整1200-2500个参数。
3、在实际控制器设计中,一般不会直接调整上述参数,通常可先辨识车辆的参数,如车辆质心位置、相对于质心的转动惯量、轮胎转向刚度等参数,进而设计性能函数,通过预览控制理论计算出对应的反馈系数和前馈系数
4、针对具有前馈-反馈结构的智能车辆轨迹跟踪控制器,比如前向预览控制算法,该算法可分为反馈控制量和前馈控制量两部分,两个控制部分均受到行驶速度的影响,对于前向预览控制算法而言,使用基于模型的控制器设计方法主要存在如下难点:
5、(1)该方法需了解车辆的精确参数,例如整车转动惯量、轮胎转向刚度,但车辆参数测量难度大,需通过昂贵的设备和一系列复杂的实验才能确定;
6、(2)在已经测得相关参数的情况下,该算法控制律的状态量权重矩阵和控制量权重矩阵需人为确定,因而在获取车辆基本参数后,依然需要经过大量实验确定合适的状态量权重矩阵和控制量权重矩阵,调参过程十分繁杂。
7、此外,在控制器的设计或学习过程中,需要用到车辆实际轨迹与参考轨迹的偏差信息,但自然驾驶数据并没有可见或可记录的参考轨迹,而仅存在于驾驶员头脑中,无法记录控制误差数据,因此难以学习具体的控制器参数。
8、综上所述,现有的车辆轨迹跟踪控制器参数学习过程,需要繁杂的人为调参过程,控制器的参数调优和标定的效率低、成本高。一种更好的方式是通过数据驱动的参数自学习,但是自然驾驶状态下系统无法知道、记录控制误差数据,因此难以学习具体的控制器反馈参数。以上原因导致自动驾驶算法控制器部署耗时耗力,亟待优化。
技术实现思路
1、本技术提供一种车辆轨迹跟踪控制器参数自学习方法及装置,以解决控制器传统部署方法效率低、成本高等问题。
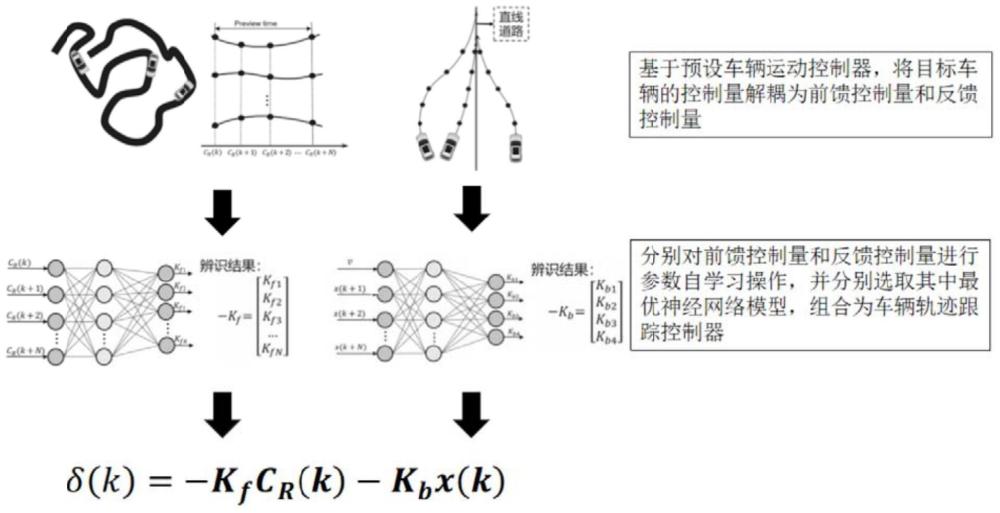
2、本技术第一方面实施例提供一种车辆轨迹跟踪控制器参数自学习方法,包括以下步骤:基于预设车辆运动控制器,将目标车辆的控制量解耦为前馈控制量和反馈控制量;分别对所述前馈控制量和所述反馈控制量进行参数自学习操作,得到所述目标车辆的最优方向盘控制量,并通过所述最优方向盘控制量控制所述目标车辆行驶。
3、可选地,在本技术的一个实施例中,所述基于预设车辆运动控制器,将目标车辆的控制量解耦为前馈控制量和反馈控制量,包括:基于预设车辆运动控制器,将目标车辆自由驾驶对应的随机曲线路径设置为所述目标车辆的第一目标行驶路径;根据所述第一目标行驶路径和预设的前向预览算法的控制律,通过预设前馈系数深度学习算法计算前馈控制系数向量;根据所述前馈控制系数向量计算所述前馈控制量。
4、可选地,在本技术的一个实施例中,所述基于预设车辆运动控制器,将目标车辆的控制量解耦为前馈控制量和反馈控制量,还包括:基于所述预设车辆运动控制器,将预设的直线轨迹设置为所述目标车辆的第二目标行驶路径;根据基于所述第二目标行驶路径和所述控制律,通过预设反馈系数深度学习算法计算反馈控制系数向量;根据所述反馈控制系数向量计算所述反馈控制量。
5、可选地,在本技术的一个实施例中,所述分别对所述前馈控制量和所述反馈控制量进行参数自学习操作,包括:将所述目标车辆自由驾驶对应的随机曲线路径设置为所述目标车辆的第一目标行驶路径;采集所述第一目标行驶路径对应的所有自由驾驶数据;基于预览时域,划分所述所有自由驾驶数据,得到多个数据片段;将每个数据片段作为一个训练样本,以所述每个数据片段中各离散时刻的车速、路径曲率作为第一输入状态,以所述每个数据片段起始时刻的方向盘转角作为第一监督信号,训练所述前向预览算法,得到前馈控制系数或前馈转角量。
6、可选地,在本技术的一个实施例中,所述分别对所述前馈控制量和所述反馈控制量进行参数自学习操作,得到所述目标车辆的最优方向盘控制量,包括:设置预设直线轨迹为所述目标车辆的第二目标行驶路径;根据不同的所述目标车辆的初始状态,控制所述目标车辆驶向所述第二目标行驶路径,生成多条驾驶员反馈控制路径;记录每条驾驶员反馈控制路径中各个时刻对应的自由驾驶数据,其中,所述自由驾驶数据包括所述目标车辆的车速和方向盘转角;基于所述第二目标行驶路径和驾驶员行驶路径,计算所述目标车辆各个时刻的跟踪误差数据;将所述跟踪误差数据和所述车速作为第二输入状态,将所述方向盘转角作为第二监督信号,训练所述前向预览算法,得到反馈控制系数或反馈转角量;基于所述前馈控制系数或所述前馈转角量以及所述反馈控制系数或反馈转角量,根据预设计算策略计算所述最优方向盘控制量。
7、本技术第二方面实施例提供一种车辆轨迹跟踪控制器参数自学习装置,包括:解耦模块,用于基于预设车辆运动控制器,将目标车辆的控制量解耦为前馈控制量和反馈控制量;控制模块,用于分别对所述前馈控制量和所述反馈控制量进行参数自学习操作,得到所述目标车辆的最优方向盘控制量,并通过所述最优方向盘控制量控制所述目标车辆行驶。
8、可选地,在本技术的一个实施例中,所述解耦模块包括:第一设置单元,用于基于预设车辆运动控制器,将目标车辆自由驾驶对应的随机曲线路径设置为所述目标车辆的第一目标行驶路径;第一计算单元,用于根据所述第一目标行驶路径和预设的前向预览算法的控制律,通过预设前馈系数深度学习算法计算前馈控制系数向量;第二计算单元,用于根据所述前馈控制系数向量计算所述前馈控制量。
9、可选地,在本技术的一个实施例中,所述解耦模块还包括:第二设置单元,用于基于所述预设车辆运动控制器,将预设的直线轨迹设置为所述目标车辆的第二目标行驶路径;第三计算单元,用于根据基于所述第二目标行驶路径和所述控制律,通过预设反馈系数深度学习算法计算反馈控制系数向量;第四计算单元,用于根据所述反馈控制系数向量计算所述反馈控制量。
10、可选地,在本技术的一个实施例中,所述控制模块包括:第三设置单元,用于将所述目标车辆自由驾驶对应的随机曲线路径设置为所述目标车辆的第一目标行驶路径;采集单元,用于采集所述第一目标行驶路径对应的所有自由驾驶数据;划分单元,用于基于预览时域,划分所述所有自由驾驶数据,得到多个数据片段;第一训练单元,用于将每个数据片段作为一个训练样本,以所述每个数据片段中各离散时刻的车速、路径曲率作为第一输入状态,以所述每个数据片段起始时刻的方向盘转角作为第一监督信号,训练所述前向预览算法,得到前馈控制系数或前馈转角量。
11、可选地,在本技术的一个实施例中,所述控制模块包括:第四设置单元,用于设置预设直线轨迹为所述目标车辆的第二目标行驶路径;生成单元,用于根据不同的所述目标车辆的初始状态,控制所述目标车辆驶向所述第二目标行驶路径,生成多条驾驶员反馈控制路径;记录单元,用于记录每条驾驶员反馈控制路径中各个时刻对应的自由驾驶数据,其中,所述自由驾驶数据包括所述目标车辆的车速和方向盘转角;第五计算单元,用于基于所述第二目标行驶路径和驾驶员行驶路径,计算所述目标车辆各个时刻的跟踪误差数据;第二训练单元,用于将所述跟踪误差数据和所述车速作为第二输入状态,将所述方向盘转角作为第二监督信号,训练所述前向预览算法,得到反馈控制系数或反馈转角量;第六计算单元,用于基于所述前馈控制系数或所述前馈转角量以及所述反馈控制系数或反馈转角量,根据预设计算策略计算所述最优方向盘控制量。
12、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆轨迹跟踪控制器参数自学习方法。
13、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的车辆轨迹跟踪控制器参数自学习方法。
14、由此,本技术的实施例具有以下有益效果:
15、本技术的实施例可通过预设车辆运动控制器,将控制量解耦为前馈和反馈控制,分别设计实验和算法进行数据驱动的参数自学习,实验和算法设计为:将自由驾驶对应的随机曲线路径设置为第一目标行驶路径,采集不同速度下的路径曲率、方向盘转角、车速等信息,作为无跟踪误差数据以学习前馈控制;预设直线为第二目标轨迹,采集驾驶员从不同初始状态驶向目标轨迹的数据,包括跟踪误差、车速、方向盘转角,作为无前馈量跟踪数据以学习反馈控制;设计深度神经网络并分别学习得到前馈、反馈控制系数或转角量,实现控制器参数自学习,从而可在较短的时间内确定车辆轨迹跟踪控制器的各个参数,极大降低了控制器参数学习的复杂度,有助于实现自动驾驶算法控制器在车辆上的快速部署。由此,解决了控制器传统部署方法效率低、成本高等问题。
16、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!