一种双余度EHA驱动桨扇发动机变距系统的建模方法与流程
本发明涉及桨扇发动机变距控制系统,具体涉及一种双余度eha驱动桨扇发动机变距系统的建模方法。
背景技术:
1、桨扇发动机(propfan)是一种结合了涡桨发动机(turboprop)与涡扇发动机(turbofan)特点的一种新型高亚音速发动机。它兼具涡扇发动机螺旋桨距可调与涡桨发动机无外涵道的特征,在巡航马赫数0.7以上运行时不仅能做到燃油消耗效率显著优于当前先进的涡扇发动机,还能使飞机的推进动力也优于涡桨发动机,被视为世界上最具前景的飞机推进系统之一。
2、桨扇发动机为了在同样飞行状态下获得更大的推进力,桨距角通常可以调节。目前桨扇发动机变距技术主要分为三大类,分别为机械式变距技术、液压式变距技术和多电式变距技术。其中采用电静液作动系统的桨叶变距技术式近年来桨叶伺服作动的优选方案。电静液作动器具有功率大、易冗余等优点。与液压作动器(hydraulic actuator,ha)相比可以避免阀芯堵塞等故障,与机电作动器(electro-mechanical actuator,ema)相比可以有效避免机械传动结构卡死故障。电静液作动器同时具备液压驱动和电驱动等特点,设计过程中采用双余度eha方法提高整体变距作动系统可靠性和安全性。电静液作动器驱动桨扇变距技术具有更高可靠性和安全性,是未来实现桨扇发动机变距控制系统的优选技术方案。
3、液压变桨距系统由电动液压泵提供工作动力来源,液压油作为传递介质,电磁阀作为控制单元,通过将液压缸活塞杆的径向运动变为桨叶的圆周运动来实现桨叶的变桨距。液压变桨距系统由液压缸、控制阀块、液压缸液压水泵站、蓄能器和管路构成。可使变桨控制器根据功率或者转速信号给出1个电压信号,再通过电液比例阀控制器转换成一定范围的电流信号,并控制流量的大小和方向。液压变桨距控制系统由信号给定、比较器、非线性pi控制、速率限制器、d/a转换器、电液比例阀、变桨距机构和反馈回路组成。
4、现在主流的发动机液压变距系统存在以下几个缺陷:液压管路占用空间面积大,液压油易泄漏,能源利用率低;与电静液作动技术相比,动态特性较差;管路复杂,不便于维护;液压系统重量较大,功重比低;不满足未来多电/全电飞机的分布式控制技术要求。
5、为了便于研究上述问题,就需要对建立相应的仿真模型,如何建立一个计算复杂度大幅降低的精准双余度eha驱动桨扇发动机桨距角控制模型,是本领域亟待解决的重要问题之一。
技术实现思路
1、本发明的目的是提供一种双余度eha驱动桨扇发动机变距系统的建模方法,以解决现有技术中的不足,本发明提出了一种复杂度大幅降低的精准的双余度eha驱动桨扇发动机桨距角控制模型。
2、本发明提供了一种双余度eha驱动桨扇发动机变距系统的建模方法,其中,包括以下步骤:
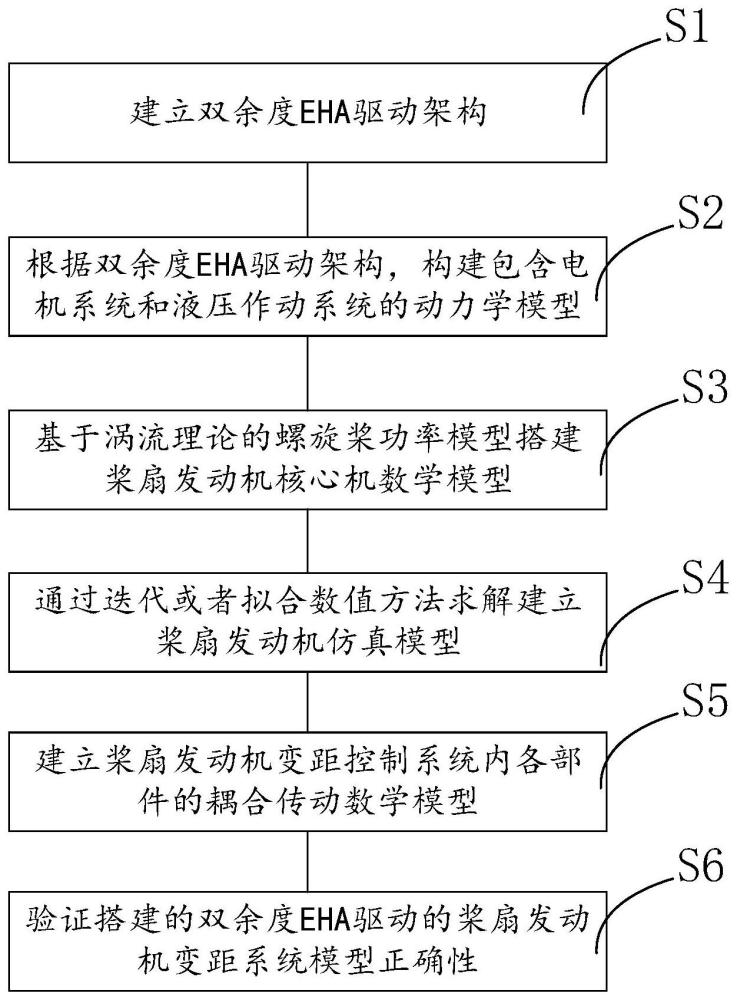
3、s1,建立双余度eha驱动架构;
4、s2,根据双余度eha驱动架构,构建包含电机系统和液压作动系统的动力学模型;
5、s3,基于涡流理论的螺旋桨功率模型搭建桨扇发动机核心机数学模型;
6、s4,通过迭代或者拟合数值方法求解建立桨扇发动机仿真模型;
7、s5,建立桨扇发动机变距控制系统内各部件的耦合传动数学模型。
8、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,还包括,
9、s6,验证搭建的双余度eha驱动的桨扇发动机变距系统模型正确性。
10、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,双余度eha驱动架构为,通过伺服控制驱动器通过位置、转速、电流反馈信息实现闭环控制伺服电机泵转向和转速的控制。
11、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,电机系统的动力学模型包括永磁同步电机变换dq轴的定子电压方程和永磁同步电机转矩方程。
12、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,液压作动系统的动力学模型包括液压缸输出力与负载力的平衡方程;
13、液压缸输出力与负载力的平衡方程为,
14、
15、其中,ap为作动筒活塞有效面积,pl为活塞上的负载压力,mt为液压缸活塞及所连接扇面负载折算后总质量,bp为液压部分中液压缸活塞的黏性阻尼系数,k为扇面负载的弹性刚度,fe为活塞上负载力。
16、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,桨扇发动机核心机数学模型包括升力相关关系方程:
17、
18、其中,cl为升力系数,σ为螺旋桨实度,为几何入流角度,γ为阻升角,β为桨叶尾涡产生的干涉角度。
19、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,步骤s4为,
20、设待插值函数为f(β),已知节点β0,β1...,βn处的函数值,将相邻的节点进行分段,获得n个插值小区间,在每个区间内使用k次多项式si(β)插值,使其满足插值条件与k-1阶平滑性:
21、si(βi)=f(βi),si(βi+1)=f(βi+1),0≤i≤n-1;
22、
23、对于已有数据进行拟合,得到其桨扇发动机核心机各部件的仿真模型。
24、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,已有数据包括不同单转或对转桨扇的外形构造,以及在不同状态参数下的性能;所述状态参数包括拉力系数、功率系数、效率和噪声。
25、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,步骤s4采用三次样条插值。
26、如上所述的双余度eha驱动桨扇发动机变距系统的建模方法,其中,可选的是,其特征在于:步骤s5为根据动力学传递关系依次建立电机驱动柱塞泵传动模型、柱塞泵驱动作动筒传动模型、作动筒驱动发动机桨扇传动模型和eha驱动桨扇动力学模型。
27、与现有技术相比,依据本发明方法所建立桨扇发动机变距系统数学模型,可以准确模拟双余度eha驱动的桨扇发动机在飞行包线范围内发动机变距系统内部参数和性能参数的变化,为该类型发动机变距系统的研究提供理论依据和数据支持。
28、依据本发明方法所建立的桨扇发动机变距系统数学模型,考虑桨扇与空气之间的动力学关系,包括了拉力系数、功率系数、效率、噪声等,并利用相似理论建立桨扇在不同工作状况下的拉力、功率、效率模型,实现了变工况下的桨扇发动机性能指标计算。
29、通过本发明提出的模型进行仿真,获得了桨扇发动机在不同工况点下的工作特性及eha驱动下的变距控制性能,从而在常规桨扇发动机部件级模型的基础上建立双余度eha驱动桨扇发动机变距系统的部件级模型。
技术特征:
1.一种双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:还包括,
3.根据权利要求2所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:双余度eha驱动架构为,通过伺服控制驱动器通过位置、转速、电流反馈信息实现闭环控制伺服电机泵转向和转速的控制。
4.根据权利要求1所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:电机系统的动力学模型包括永磁同步电机变换dq轴的定子电压方程和永磁同步电机转矩方程。
5.根据权利要求1所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:液压作动系统的动力学模型包括液压缸输出力与负载力的平衡方程;
6.根据权利要求1所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:桨扇发动机核心机数学模型包括升力相关关系方程:
7.根据权利要求1所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:步骤s4为,
8.根据权利要求7所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:已有数据包括不同单转或对转桨扇的外形构造,以及在不同状态参数下的性能;所述状态参数包括拉力系数、功率系数、效率和噪声。
9.根据权利要求7所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:步骤s4采用三次样条插值。
10.根据权利要求1-9任一项所述的双余度eha驱动桨扇发动机变距系统的建模方法,其特征在于:步骤s5为根据动力学传递关系依次建立电机驱动柱塞泵传动模型、柱塞泵驱动作动筒传动模型、作动筒驱动发动机桨扇传动模型和eha驱动桨扇动力学模型。
技术总结
本发明公开了一种双余度EHA驱动桨扇发动机变距系统的建模方法,包括以下步骤:S1,建立双余度EHA驱动架构;S2,根据双余度EHA驱动架构,构建包含电机系统和液压作动系统的动力学模型;S3,基于涡流理论的螺旋桨功率模型搭建桨扇发动机核心机数学模型;S4,通过迭代或者拟合数值方法求解建立桨扇发动机仿真模型;S5,建立桨扇发动机变距控制系统内各部件的耦合传动数学模型。本发明能够解决现有技术中的不足,提出一种建立复杂度大幅降低的精准的双余度EHA驱动桨扇发动机桨距角控制模型的方法。
技术研发人员:王兴坚,樊思明,王启扬,王少萍,张育玮
受保护的技术使用者:天目山实验室
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!