自动驾驶测试仿真系统、方法及本地实时机与流程
本发明涉及自动驾驶,特别涉及一种自动驾驶测试仿真系统、方法及本地实时机。
背景技术:
1、自动驾驶算法的仿真测试目前主要有两种实现方式:一种是基于云端的大规模并发仿真,仿真和算法都部署在云端,仿真云平台负责基于高精地图模拟动静态场景、车辆动力学、传感器和v2x(车对外界的信息交换)等仿真数据,自动驾驶算法基于云平台模拟的仿真数据生成车辆控制信号,反向控制仿真云平台的车辆动力学模型,从而形成仿真闭环。另一种是基于单机的在环仿真,被测件为adas(高级驾驶辅助系统)或ad控制器,仿真工作站模拟动静态场景、动力学和传感器等仿真数据,与控制器中的算法形成仿真闭环。由于云端计算资源的弹性扩展机制,云仿真适合于对自动驾驶算法进行大规模并发测试,用于自动驾驶系统开发v流程的模型开发(mil)和代码开发(sil)阶段;而在环仿真则更适合于v流程的硬件在环(hil)和整车在环(vil)阶段。
2、云仿真方案主要适用于模型开发和代码开发阶段,但无法对真实的控制器硬件进行测试;而在环仿真方案可以对控制器进行测试,但对于每一个被测控制器都需要配置一套独立的高性能仿真工作站,当需要同时测试多个adas/ad控制器时,需要配置大量的高性能仿真工作站和实时系统,测试成本高,且不同仿真工作站之间的高精地图和场景库的同步也是个问题,因此现在主机厂的hil和vil测试一般都无法像云仿真那样,进行大量的并发测试,测试效率比较低。
技术实现思路
1、本发明的目的是提供一种既能够对真实的控制器硬件进行测试,又能够降低测试成本,提高测试效率的自动驾驶测试仿真系统、方法及本地实时机。
2、为达到上述目的,本发明提供了一种自动驾驶测试仿真系统,其包括:
3、仿真云平台,用于根据预设的动力学参数,在云端配置虚拟主车和对应的传感器;基于虚拟主车状态,进行虚拟主车运行的仿真,得到实时传感器数据和实时v2x仿真数据,向本地实时机下发实时传感器数据和实时v2x仿真数据;接收本地实时机上送的车辆运行数据,根据所述车辆运行数据,更新虚拟主车状态;测试时段结束后,根据预设的原子判定条件,对虚拟主车状态进行原子判定,得到原子结果;结合所述原子结果和虚拟主车状态,得到自动驾驶测试评价结果;
4、本地实时机,用于接收仿真云平台下发的实时传感器数据和实时v2x仿真数据,将所述实时传感器数据和实时v2x仿真数据转化为控制器对应的输入协议,传输给控制器;接收控制器发送的控制指令,根据所述控制指令,得到车辆运行数据,将所述车辆运行数据上送给仿真云平台;
5、控制器,用于接收本地实时机通过对应的输入协议传输的实时传感器数据和实时v2x仿真数据,利用预设的自动驾驶算法对实时传感器数据和实时v2x仿真数据进行分析,得到控制车辆驾驶的控制指令,将所述控制指令发送给本地实时机。
6、具体实施时,所述仿真云平台,包括:
7、车辆与传感器配置模块,用于根据预设的动力学参数,配置虚拟主车和对应的传感器;接收本地实时机上送的车辆运行数据,根据所述车辆运行数据,更新虚拟主车状态;
8、地图和静态场景仿真模块,用于基于预设的仿真场景所需的静态高精地图和场景,以及虚拟主车状态,对所述虚拟主车运行时的道路数据和静态场景进行仿真,得到虚拟主车运行时的实时道路数据和实时静态场景数据,发送给动态场景仿真模块;
9、动态场景仿真模块,用于根据虚拟主车运行时的实时道路数据和实时静态场景数据,进行交通流仿真和场景仿真,得到虚拟主车运行时的动态场景数据,发送给传感器和v2x仿真模块;
10、传感器和v2x仿真模块,用于根据虚拟主车运行时的动态场景数据,模拟虚拟主车对应的传感器探测和虚拟主车的v2x通信功能,得到实时传感器数据和实时v2x仿真数据;
11、测试评价模块,用于根据预设的原子判定条件,对测试时段内的虚拟主车状态进行原子判定,得到原子结果;对测试时段内的虚拟主车状态进行分析,得到车辆状态;结合所述原子结果和所述车辆状态,得到自动驾驶测试评价结果。
12、进一步地,为了丰富测试例,具体实施例中,用户能够配置或管理测试所用的地图和场景,相应地,所述仿真云平台,还包括:
13、地图和场景库管理模块,用于配置仿真场景所需的静态高精地图;配置和管理仿真测试所需的场景,将配置好的仿真场景所需的静态高精地图和场景,传输给所述地图和静态场景仿真模块。
14、具体实施例中,若所述控制器位于真实车辆,所述本地实时机通过5g空口与所述仿真云平台通信连接;
15、若所述控制器并未位于真实车辆,所述本地实时机通过以太网与所述仿真云平台通信连接。
16、本发明实施例中,通过设置仿真云平台,根据预设的动力学参数,在云端配置虚拟主车和对应的传感器;基于虚拟主车状态,进行虚拟主车运行的仿真,得到实时传感器数据和实时v2x仿真数据,向本地实时机下发实时传感器数据和实时v2x仿真数据;接收本地实时机上送的车辆运行数据,根据车辆运行数据,更新虚拟主车状态;测试时段结束后,根据预设的原子判定条件,对虚拟主车状态进行原子判定,得到原子结果;结合原子结果和虚拟主车状态,得到自动驾驶测试评价结果;设置本地实时机接收仿真云平台下发的实时传感器数据和实时v2x仿真数据,将实时传感器数据和实时v2x仿真数据转化为控制器对应的输入协议,传输给控制器;接收控制器发送的控制指令,根据控制指令,得到车辆运行数据,将车辆运行数据上送给仿真云平台;设置控制器接收本地实时机通过对应的输入协议传输的实时传感器数据和实时v2x仿真数据,利用预设的自动驾驶算法对实时传感器数据和实时v2x仿真数据进行分析,得到控制车辆驾驶的控制指令,将控制指令发送给本地实时机。与现有技术中云仿真和在环仿真分开测试的技术方案相比,利用本地实时机将仿真云平台和控制器联系在一起,在对真实的控制器硬件进行测试的基础上,使得硬件在环仿真能够重用云仿真的高性能服务器和海量测试场景库,大大提高了硬件资源的利用率,降低测试成本,无需重新配置,减少测试人员的工作,从而提高测试效率。
17、本发明实施例中还提供一种既能够对真实的控制器硬件进行测试,又能够降低测试成本,提高测试效率的本地实时机,该本地实时机应用于自动驾驶测试仿真系统中,其包括:
18、动力学仿真模块,用于接收数据接口层发送的动力学参数,构建车辆动力学模型;在进行硬件在环测试时,根据数据接口层接收的控制器发送的控制指令,驱动预先构建的车辆动力学模型,得到车辆运行数据;所述车辆运行数据,包括:车辆的全球导航卫星系统信号、惯性测量信号和车辆底盘状态数据;
19、数据接口层,用于向仿真云平台获取动力学参数,发送给动力学仿真模块;接收仿真云平台下发的实时传感器数据和实时v2x仿真数据,将所述实时传感器数据和实时v2x仿真数据转化为控制器对应的输入协议,传输给控制器;接收控制器发送的控制指令,在进行硬件在环测试时,将所述控制指令发送给动力学仿真模块,接收动力学仿真模块确定的车辆运行数据,上送给仿真云平台;在进行整车在环测试时,将所述控制指令发送给真实车辆,获取真实车辆的车辆运行数据,上送给仿真云平台。
20、具体实施例中,为了支持多在环控制器能并发仿真,不同的控制器在仿真云平台同时进行虚拟主车的仿真时不互相干扰,所述本地实时机,还包括:
21、云端注册模块,用于利用守护进程给动力学仿真模块和数据接口层设置唯一标识符,以所述唯一标识符为标识,将动力学仿真模块和数据接口层注册进仿真云平台,以绑定本地实时机和虚拟主车及对应的传感器。
22、本发明实施例中,通过设置动力学仿真模块,接收数据接口层发送的动力学参数,构建车辆动力学模型;在进行硬件在环测试时,根据数据接口层接收的控制器发送的控制指令,驱动构建的车辆动力学模型,得到车辆运行数据;通过设置数据接口层,向仿真云平台获取动力学参数,发送给动力学仿真模块;接收仿真云平台下发的实时传感器数据和实时v2x仿真数据,将实时传感器数据和实时v2x仿真数据转化为控制器对应的输入协议,传输给控制器;接收控制器发送的控制指令,在进行硬件在环测试时,将控制指令发送给动力学仿真模块,接收动力学仿真模块确定的车辆运行数据,上送给仿真云平台;在进行整车在环测试时,将控制指令发送给真实车辆,获取真实车辆的车辆运行数据,上送给仿真云平台。利用动力学仿真模块和数据接口层的配合,将仿真云平台和控制器联系在一起,不仅能够对真实的控制器硬件进行测试,也使得硬件在环仿真能够重用云仿真的高性能服务器和海量测试场景库,大大提高了硬件资源的利用率,降低测试成本,无需重新配置,减少测试人员的工作,从而提高测试效率。
23、本发明实施例中还提供了一种自动驾驶测试仿真方法,应用于自动驾驶测试仿真系统,其包括:
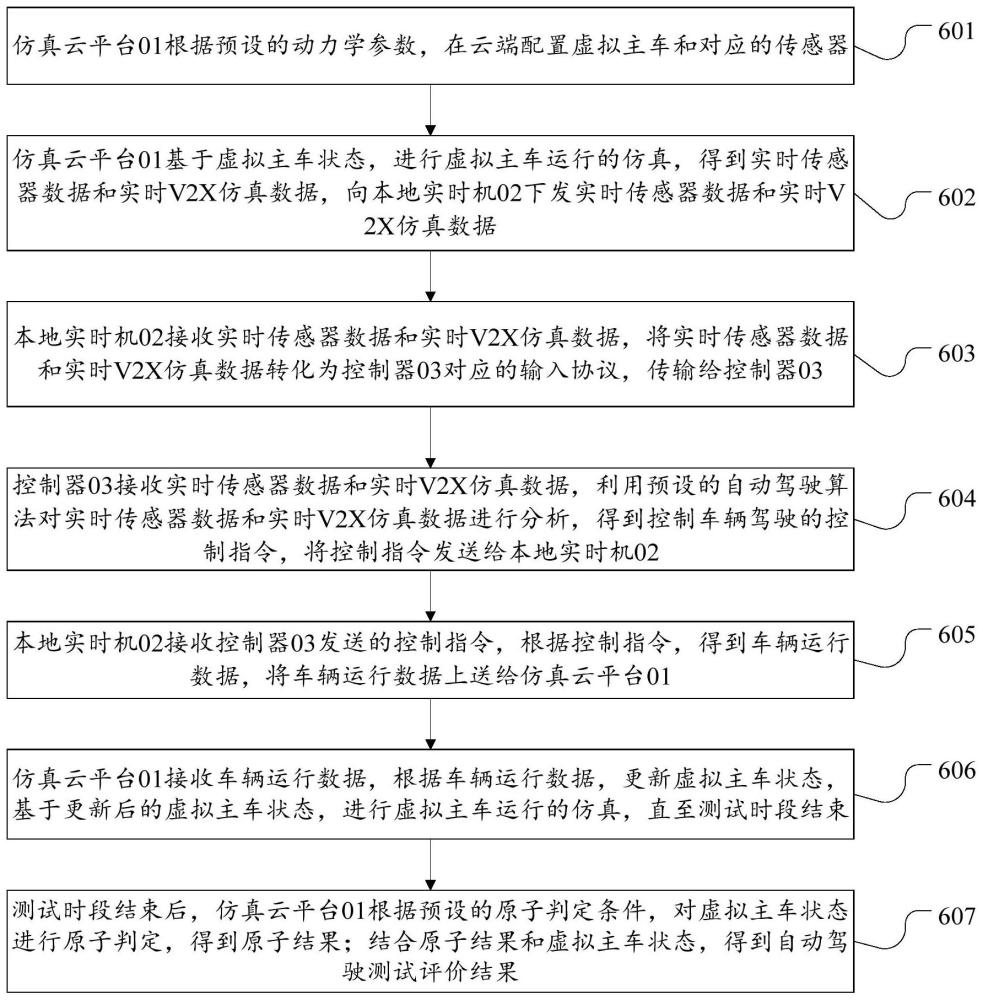
24、仿真云平台根据预设的动力学参数,在云端配置虚拟主车和对应的传感器;
25、仿真云平台基于虚拟主车状态,进行虚拟主车运行的仿真,得到实时传感器数据和实时v2x仿真数据,向本地实时机下发实时传感器数据和实时v2x仿真数据;
26、本地实时机接收实时传感器数据和实时v2x仿真数据,将所述实时传感器数据和实时v2x仿真数据转化为控制器对应的输入协议,传输给控制器;
27、控制器接收所述实时传感器数据和实时v2x仿真数据,利用预设的自动驾驶算法对实时传感器数据和实时v2x仿真数据进行分析,得到控制车辆驾驶的控制指令,将所述控制指令发送给本地实时机;
28、本地实时机接收控制器发送的控制指令,根据所述控制指令,得到车辆运行数据,将所述车辆运行数据上送给仿真云平台;
29、仿真云平台接收车辆运行数据,根据所述车辆运行数据,更新虚拟主车状态,基于更新后的虚拟主车状态,进行虚拟主车运行的仿真,直至测试时段结束;
30、测试时段结束后,仿真云平台根据预设的原子判定条件,对虚拟主车状态进行原子判定,得到原子结果;结合所述原子结果和虚拟主车状态,得到自动驾驶测试评价结果。
31、具体实施时,仿真云平台基于虚拟主车状态,进行虚拟主车运行的仿真,得到实时传感器数据和实时v2x仿真数据,包括:
32、地图和静态场景仿真模块基于预设的仿真场景所需的静态高精地图和场景,以及虚拟主车状态,对所述虚拟主车运行时的道路数据和静态场景进行仿真,得到虚拟主车运行时的实时道路数据和实时静态场景数据,发送给动态场景仿真模块;
33、动态场景仿真模块根据虚拟主车运行时的实时道路数据和实时静态场景数据,进行交通流仿真和场景仿真,得到虚拟主车运行时的动态场景数据,发送给传感器和v2x仿真模块;
34、传感器和v2x仿真模块根据虚拟主车运行时的动态场景数据,模拟虚拟主车对应的传感器探测和虚拟主车的v2x通信功能,得到实时传感器数据和实时v2x仿真数据。
35、具体实施例中,测试时段结束后,仿真云平台根据预设的原子判定条件,对虚拟主车状态进行原子判定,得到原子结果;结合所述原子结果和虚拟主车状态,得到自动驾驶测试评价结果,包括:
36、测试评价模块根据预设的原子判定条件,对测试时段内的虚拟主车状态进行原子判定,得到原子结果;对测试时段内的虚拟主车状态进行分析,得到车辆状态;结合所述原子结果和所述车辆状态,得到自动驾驶测试评价结果。
37、另一具体实施例中,为了通过增加仿真场景提高测试仿真的适应度,仿真云平台基于虚拟主车状态,进行虚拟主车运行的仿真,得到实时传感器数据和实时v2x仿真数据,还包括:
38、地图和场景库管理模块配置仿真场景所需的静态高精地图;配置和管理仿真测试所需的场景,将配置好的仿真场景所需的静态高精地图和场景,传输给所述地图和静态场景仿真模块。
39、本发明实施例中还提供了一种自动驾驶测试仿真方法,应用于本地实时机,其包括:
40、数据接口层接收控制器发送的控制指令;
41、在进行硬件在环测试时,数据接口层向仿真云平台获取所述动力学参数,将所述控制指令和所述动力学参数,发送给动力学仿真模块,动力学仿真模块根据所述动力学参数,构建车辆动力学模型;根据所述控制指令驱动构建的车辆动力学模型,得到车辆运行数据,数据接口层接收动力学仿真模块确定的车辆运行数据,上送给仿真云平台;
42、在进行整车在环测试时,数据接口层将所述控制指令发送给真实车辆,获取真实车辆的车辆运行数据,上送给仿真云平台;
43、其中,所述车辆运行数据,包括:车辆的全球导航卫星系统信号、惯性测量信号和车辆底盘状态数据。
44、此外,为了实现多在环控制器并发仿真,具体实施例提供的自动驾驶测试仿真方法,还包括:
45、云端注册模块利用守护进程给动力学仿真模块和数据接口层设置唯一标识符,以所述唯一标识符为标识,将动力学仿真模块和数据接口层注册进仿真云平台,以绑定本地实时机和虚拟主车及对应的传感器。
46、本发明实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述自动驾驶测试仿真方法。
47、本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述自动驾驶测试仿真方法的计算机程序。
- 还没有人留言评论。精彩留言会获得点赞!