一种无人机飞行路径确定方法及系统与流程
本发明涉及路径确定,尤其涉及一种无人机飞行路径确定方法及系统。
背景技术:
1、无人机的飞行路径是根据航飞任务、无人机数量、航飞地理环境信息、航飞天数以及携带荷载类型等信息来确定的,具体来说,无人机的飞行路径规划会受到以下因素的影响:航飞任务:不同的任务类型和目标会影响无人机的飞行路径;无人机数量:如果有多个无人机同时执行任务,那么需要协调它们的飞行路径,以确保相互之间不会发生碰撞;以及航飞地理环境信息、航飞天数和携带荷载类型等。
2、目前的无人机飞行路径一般通过厂家专业人员对无人机工作区域内进行预飞行,通过人眼观察机载摄像设备,判定障碍物体积,选择规避路线,从而实现对无人机飞行路径的制定;但是在日常使用中,障碍物的环境数据可能会发生改变,这就需要及时对飞行路径进行调整;因此,如何利用无人机上的传感器及时对飞行路径进行调整,是本发明所要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种无人机飞行路径确定方法,以解决上述背景技术中提出的如何及时对无人机飞行路径进行调整的技术问题。
2、为实现上述目的,本发明提供如下技术方案:
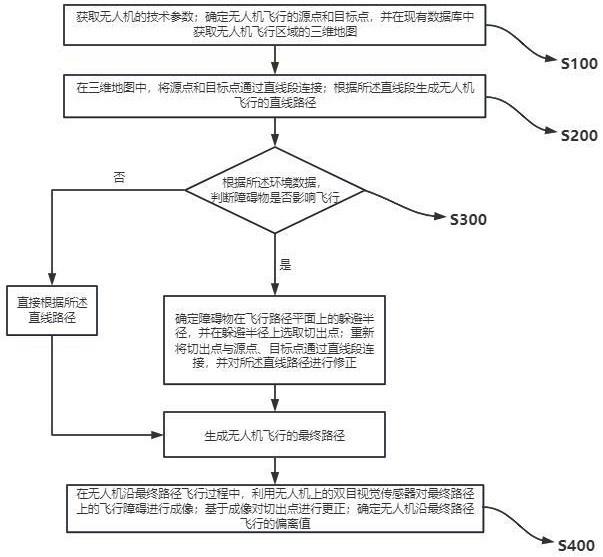
3、获取无人机的技术参数;确定无人机飞行的源点和目标点,并在现有数据库中获取无人机飞行区域的三维地图;
4、在三维地图中,将源点和目标点通过直线段连接;根据所述直线段生成无人机飞行的直线路径;
5、识别出所述直线路径上的障碍物;并从现有数据库中获取障碍物的环境数据;
6、根据所述环境数据,判断障碍物是否影响飞行;
7、若是,则确定障碍物在飞行路径平面上的躲避半径,并在躲避半径上选取切出点;重新将切出点与源点、目标点通过直线段连接,并对所述直线路径进行修正,生成无人机飞行的最终路径;
8、若否,则直接根据所述直线路径,生成无人机飞行的最终路径;
9、在无人机沿最终路径飞行过程中,利用无人机上的双目视觉传感器对最终路径上的飞行障碍进行成像;基于成像对切出点进行更正;
10、确定无人机沿最终路径飞行的偏离值。
11、进一步的,所述获取无人机的技术参数;确定无人机飞行的源点和目标点,并在现有数据库中获取无人机飞行区域的三维地图的步骤包括:
12、根据所述技术参数与无人机性能的映射关系,确定无人机性能在预设容量范围内的变化曲线信息;利用无人机性能表示无人机基于所述技术参数所能达到的飞行性能。
13、进一步的,所述在三维地图中,将源点和目标点通过直线段连接;根据所述直线段生成无人机飞行的直线路径的步骤包括:
14、确定无人机飞行的源点和目标点;
15、基于所述源点和目标点,确定无人机的飞行区域;
16、获取所述飞行区域内的三维地图,并对所述三维地图进行语义分割处理,得到包含所需语义信息的分割图像;
17、在所述分割图像中标定源点和目标点,再将所述源点和目标点通过直线段连接;
18、基于连接后的直线段,生成无人机飞行的直线路径。
19、进一步的,所述识别出所述直线路径上的障碍物;并从现有数据库中获取障碍物的环境数据;根据所述环境数据,判断障碍物是否影响飞行的步骤包括:
20、获取所述分割图像中直线路径上障碍物的环境数据,并对障碍物的语义信息进行标注;
21、根据所述标注和技术参数,判断障碍物是否影响飞行。
22、进一步的,所述若是,则确定障碍物在飞行路径平面上的躲避半径,并在躲避半径上选取切出点;重新将切出点与源点、目标点通过直线段连接,并对所述直线路径进行修正,生成无人机飞行的最终路径;若否,则直接根据所述直线路径,生成无人机飞行的最终路径的步骤包括:
23、若障碍物影响无人机飞行,则根据所述标注确定无人机的躲避半径,基于所述躲避半径和技术参数,确定躲避半径上的切出点;
24、基于所述切出点更新所述直线路径,将更新后的直线路径作为无人机飞行的最终路径;
25、若障碍物不影响无人机飞行,则判断所述直线路径是否超出无人机飞行性能;
26、如果并未超出,则直接将直线路径作为无人机飞行的最终路径;
27、如果超出,则在直线路径上增设中转点,并根据所述中转点更新直线路径,再将更新后的直线路径作为无人机飞行的最终路径。
28、进一步的,所述所述在无人机沿最终路径飞行过程中,利用无人机上的双目视觉传感器对最终路径上的障碍物进行成像;所述成像对障碍物环境数据和切出点进行更正;确定无人机沿最终路径飞行的偏离值的步骤包括:
29、利用无人机上的双目视觉传感器搜寻最终路径上的飞行障碍,并采集所述飞行障碍的深度图像;
30、基于所述深度图像测量出飞行障碍的环境数据,并与障碍物的环境数据进行比对,确定切出点的动态调整值;
31、完成对无人机沿最终路径飞行偏离值的校正。
32、进一步的,所述方法还包括:
33、获取飞行禁区经纬度数据,并在包含所需语义信息的分割图像中划分禁飞区;
34、在所述禁飞区预设范围内增设绕飞点,根据直线路径和绕飞点确定绕行禁飞区的航迹片段,组合航迹片段与直线路径,生成无人机飞行的最终路径。
35、进一步的,所述系统包括:
36、参数获取模块,用于获取无人机的技术参数;确定无人机飞行的源点和目标点,并在现有数据库中获取无人机飞行区域的三维地图;
37、路径生成模块,可以在三维地图中,将源点和目标点通过直线段连接;根据所述直线段生成无人机飞行的直线路径;
38、路径确认模块,能够识别出所述直线路径上的障碍物;并从现有数据库中获取障碍物的环境数据;根据所述环境数据,判断障碍物是否影响飞行;若是,则确定障碍物在飞行路径平面上的躲避半径,并在躲避半径上选取切出点;重新将切出点与源点、目标点通过直线段连接,并对所述直线路径进行修正,生成无人机飞行的最终路径;若否,则直接根据所述直线路径,生成无人机飞行的最终路径;
39、路径更正模块,可以在无人机沿最终路径飞行过程中,利用无人机上的双目视觉传感器对最终路径上的飞行障碍进行成像;基于成像对切出点进行更正;确定无人机沿最终路径飞行的偏离值。
40、进一步的,所述参数获取模块包括:
41、获取单元,可以根据所述技术参数与无人机性能的映射关系,确定无人机性能在预设容量范围内的变化曲线信息;
42、表示单元,能够利用无人机性能表示无人机基于所述技术参数所能达到的飞行性能。
43、进一步的,所述路径生成模块包括:
44、划分单元,用于确定无人机飞行的源点和目标点;基于所述源点和目标点,确定无人机的飞行区域;
45、处理单元,可以获取所述飞行区域内的三维地图,并对所述三维地图进行语义分割处理,得到包含所需语义信息的分割图像;
46、生成单元,能够在所述分割图像中标定源点和目标点,再将所述源点和目标点通过直线段连接;基于所述连接后的直线段,生成无人机飞行的直线路径。
47、与现有技术相比,本发明的有益效果是:
48、1、通过结合用户设定的源点和目标点,初步生成无人机的飞行路径,并利用现有数据,确定飞行路径上的障碍物,同时利用划分出的切出点,对飞行路径进行调整,避免无人机撞击障碍物,通过利用无人机上的双目视觉传感器对切出点数据进行更新,进一步提高了无人机的安全性,同时也极大地降低了飞行路径的制定门槛,也减少了数据的采集过程中,节约了大量人力物力。
49、2、通过划分禁飞区和确定绕飞点,从而在保证正常飞行任务的同时,也避免了“黑飞”的出现,降低了无人机的操作门槛,使得无人机的使用更为方便。
- 还没有人留言评论。精彩留言会获得点赞!