一种储油罐作业机器人的防缠绕路径规划方法
一种储油罐作业机器人的防缠绕路径规划方法,属于储油罐作业。
背景技术:
1、储油罐是石油石化领域中极为常见的存储设备,由于内部介质成分的复杂性,使储油罐底板极易产生腐蚀现象,其状态是否完好是决定储罐开罐周期的关键因素,因此对其进行检测评价非常重要。然而实际应用中,储罐底板经常被储存介质遮盖,传统技术手段难以实施检测,只能停工进行开罐检修,这种方式不仅费时费力,而且成本高。
2、传统的储油罐底板检测和清理方法主要依靠人工,这种方法存在着人工误差大、效率低、安全风险高等问题,为了解决这些问题,机器人技术被引入到储油罐底板检测中。但是由于储油罐底部环境复杂,除了布置在罐底处已知未知的阳极块之外,还经常形成一些位置难以预知的障碍物,并且由于避障行为的难度远远高于正常移动,因此在实际作业时,机器人整体的作业效率较低。在现有技术中:
3、(1)在文献“丁鹏.(2021).迭代a*算法与bug算法的移动机器人路径规划研究(硕士学位论文,西北师范大学)”所公开的技术方案中采用bug算法与a*算法结合的方案,即机器人在驶向目标位置时,先判断机器人是否遇到障碍物,当机器人遇到障碍物时启用改进a*算法进行路径搜索,而当机器人未遇到障碍物时启用bug2算法进行搜索路径。该方法虽然避障性能较优,但是该路径规划方法是建立在全局规划上的,即必须提前预知工作环境内所有环境信息,具有较大局限性,在很多工作环境不确定的情况下很难实现。
4、(2)在文献“杨洋,温兴,马强龙,张刚,程尚坤,齐健,陈志桢,陈黎卿.基于贝塞尔曲线的动态识别区农机避障路径实时规划[j].农业工程学报,2022,38(06):34-43.”所公开的技术方案中,首先构建农机作业行走动态识别区,在动态识别区内利用激光雷达感知障碍物。然后利用障碍物信息计算避障路径控制点选取范围,然后利用控制点进行贝塞尔曲线拟合生成满足农机最小转弯半径等多约束条件下的路径簇,同时以曲率最小为目标从路径簇中选取最优避障路径。
5、尽管满足了动力学约束,生成的路径光滑性高,但是在大部分情况下会产生障碍物局部的冗余路径,不能及时调整方向或规划新的路线,路径规划效率有待提升。相比于该方案,本发明在原有bug避障算法的基础上,重新定义驶离障碍物位置,避产生冗余路径。
6、(3)在文献“代峰燕,高庆珊,陈家庆,郭丽峰.储油罐清洗机器人全覆盖路径规划研究[j].机械设计与制造,2020(02):263-266.”所公开的技术方案中,针对储油罐清洗机器人在清洗作业时因罐内障碍物导致重叠率较高、无法保证清洗覆盖面积问题,在一种全覆盖罐底方法的基础上提出了适用于内浮顶储油罐的改进bug路径规划算法。首先通过正六边形拓扑结构全覆盖罐底的清洗原理,得到清洗点坐标;其次,采用坐标法进行清洗环境建模,在传统bug算法的直线行走条件中加入机器人清洗目标点与罐底障碍物位置关系信息,优化清洗点坐标位置,规划出机器人起点到每个清洗点之间无障碍的直线行走路径。但是该改进方法的目的是使障碍物在开始就选择无障碍物路劲,可以说并没有体现避障这个过程,对于少个障碍物环境可以能该算法应用效果较优,但是若工作场景较为复杂,该算法很容易陷入死循环。
7、(4)在文献“查荣瑞,马云华,燕翔,郑霜.基于场景理解与改进型bug算法的移动机器人避障[j].计算机测量与控制,2023,31(03):228-234.”所公开的技术方案中,针对现有移动机器人在视觉避障上存在的局限,将深度学习算法和路径规划技术相结合,提出了一种基于深层卷积神经网络和改进bug算法的机器人避障方法;该方法采用多任务深度卷积神经网络提取道路图像特征,实现图像分类和语义分割任务;其次,基于语义分割结果构建栅格地图,并将图像分类结果与改进的bug算法相结合,搜索出最优避障路径;同时,为降低冗余计算,设计了特征对比结构来对避免对重复计算的特征信息,保障机器人在实际应用中实时性。
8、该方法虽然可以有效平衡视觉任务的精度与效率,准确规划出安全的避障路径,辅助机器人完成导航避障。但是该方法算法采用了多任务深度卷积神经网络,需要大量的计算资源,使得算法的实时性较差,难以应用到实时的机器人避障场景中;同时由于人工智能算法对数据的敏感度较高,一旦遇到光照、天气等场景变化,需要重新训练网络,使得算法的实用性受限。由于深度学习算法需要大量的数据才能对物体进行识别和分类,对于小的障碍物,该算法的识别能力可能较差,难以实现对小障碍物的避障。
9、(5)在申请号为201810492962.1,申请日为2021年5月4日,专利名称为“一种结合a*算法和vfh避障算法的机器人动态路径规划方法”的中国发明专利中公开了一种技术方案,在该技术方案中将机器人所处的环境表示成栅格地图,并用算法在栅格地图中搜索出一条全局初始路径机器人沿初始路径向目标点运动,判断是否遇到障碍物,遇到则采用vfh算法进行避障,否则继续向目标点运动。
10、该技术方案中,采用a*算法与vfh算法结合进行动态避障,能够适用于大部分场景,但是对于vfh算法来说,容易在狭窄区域产生死区现象,因为vfh算法为一种人工势场法,当其左右两边都有障碍物时,若产生的阻碍力相同,则会发生死区现象。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种采用分区分时作业的方式,避免检测机器人和清理机器人在作业时发生线缆缠绕或者机器人与排水管发生缠绕。同时在实现局部路径规划的同时,重新定义机器人驶离障碍物位置,减少了避障过程中冗余路径的产生,提高机器人检测和清理效率的储油罐作业机器人的防缠绕路径规划方法。
2、本发明解决其技术问题所采用的技术方案是:该储油罐作业机器人的防缠绕路径规划方法,其特征在于:包括如下步骤:
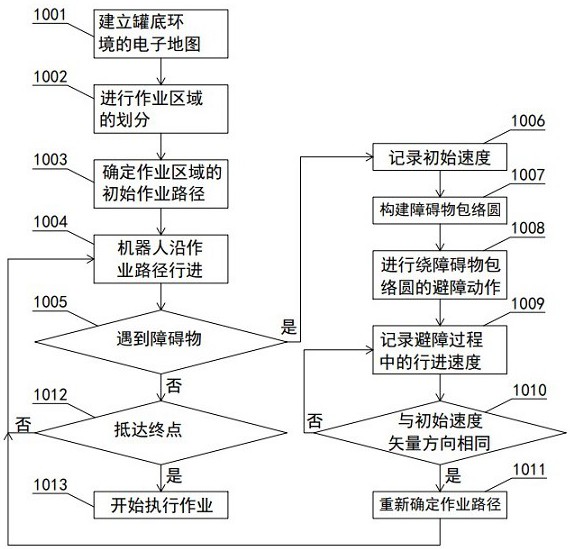
3、步骤a,建立在环境的电子地图;
4、步骤b,根据储油罐罐顶人孔数量,对储油罐罐底进行作业区域的划分,并确定机器人进行作业的作业区域的先后顺序;
5、步骤c,针对每一个作业区域,确定其作业的初始起点和终点,依照bug算法将初始起点和终点的连线作为作业路径;
6、步骤d,机器人在沿作业路径进行行进时,按照设定速度沿路径运动,并在行进过程中是否遇到障碍物,如果存在障碍物,执行步骤e,否则继续沿路径运动;
7、步骤e,机器人在遇到障碍物之后,机器人将检测到障碍物前一时刻的行进速度记为初始速度,并记录初始速度的数值以及行进的矢量方向,同时构建障碍物包络圆;
8、步骤f,构建完成障碍物包络圆之后,机器人进行绕障碍物包络圆的避障动作;
9、步骤g,根据执行避障动作过程中的速度判断结束避障动作的结束点,重新规划作业路径,机器人沿重新规划的作业路径行进;
10、步骤h,机器人抵达作业路径的终点之后,进行作业。
11、优选的,在步骤b中,人孔数量为n且n≥2,作业区域的划分规则为:
12、n为偶数时:将储油罐的罐底均匀划分为n或2n个扇形的作业区域。当扇形区域的数量为n时,每一个人孔位于其对应的作业区域的正上方,当扇形区域的数量为2n时,每一个人孔位于两个相邻作业区域中部的正上方;
13、当n为奇数时,将储油罐的罐底均匀划分为2n个扇形的作业区域,且至少一个人孔位于任意一个作业区域的正上方。
14、优选的,在步骤b中,机器人包括先后下放至罐底处的清理机器人和检测机器人,
15、对于清理机器人而言:以下放的作业区域作为最后进行作业的作业区域,以下放作业区域相对的作业区域作为最初进行作业的作业区域,并以下方区域为起点,按照相对作业区域-相邻作业区域的顺序循环完成罐底所有作业区域的清理作业,并从最初下放的人孔处转移出储油罐;
16、对于检测机器人而言:在清理机器人开始对第二个作业区域进行清理作业时,按照与清理机器人相同的顺序,依次对每一个已经完成清理的作业区域内进行检测作业,并在在进行下一个作业区域的检测作业之前,转移出储油罐,并从与下一个进行检测作业的作业区域最近的人孔处下放。
17、优选的,在步骤e中,构建障碍物包络圆时,包括如下步骤:
18、步骤e-1,机器人通过其携带的超声波传感器感知障碍物特征点,特征边信息;
19、步骤e-2,以点和边做障碍物外接圆,即障碍物包络圆;
20、步骤e-3,完成包络圆的外轮廓拟合后,对包络圆进行坐标系的转换,将障碍物包络圆从罐底坐标系转换到机器人运动坐标系;
21、步骤e-4,确定障碍物包络圆圆心在机器人运动坐标系下的坐标。
22、优选的,在步骤g中,在机器人执行避障行动的过程中,当实时的运动的矢量方向与初始速度的矢量方向相同时,停止避障运动,并将停止避障运动的终点作为结束点。
23、优选的,步骤h,包括如下步骤:
24、步骤h-1,将作业区域内每一个需要进行作业的作业点进行矩形化,使整个需要进行作业点位于其外切的矩形内,然后对该外切矩形进行栅格化;
25、步骤h-2,对于待检测区域内栅格,设定检测优先级;
26、步骤h-3,将当前栅格进行赋值,在当前栅格内完成作业之后,机器人按照优先级顺序向最优先遍历的栅格行进,并将下一栅格设定为当前位置,并进行赋值;
27、步骤h-4,机器人判断是否所有栅格均已遍历,如果遍历完成所有栅格,移动至作业区域内下一个作业点处进行作业,或移动至其他作业区域内进行作业,否则返回步骤h-3。
28、优选的,在步骤h-1中,定义集合s={(x,y)|x,y是待检测区域范围内的点},同时定义每个栅格的值
29、
30、并将机器人当前所处的栅格设置为起始栅格;
31、并在步骤h-3中,将当前栅格赋值为0。
32、优选的,在步骤h-2中,规定作业从栅格地图最左侧边缘开始,优先级依次为px-1,y左侧栅格、px,y+1上侧栅格、px+1,y右侧栅格、px,y-1下侧栅格。
33、与现有技术相比,本发明所具有的有益效果是:
34、在本储油罐作业机器人的防缠绕路径规划方法中,采用分区分时作业的方式,避免检测机器人和清理机器人在作业时发生线缆缠绕或者机器人与排水管发生缠绕。同时在实现局部路径规划的同时,重新定义机器人驶离障碍物位置,减少了避障过程中冗余路径的产生,提高机器人检测和清理效率。
35、在本储油罐作业机器人的防缠绕路径规划方法中,基于传统的bug避障算法进行改进,生成一种能够应对储油罐在油环境这一特殊工作场景的路径规划方法。因该工作环境中存在油泥,容易使机器人产生打滑和陷入油泥问题,此方案采用障生成碍物包络圆方法根据油罐底障碍物体型较小特点重新设定障碍物,提高生成路径的光滑度和连续性。
36、本路径规划方法具有传统bug算法的灵活避障性,规划的路径符合动力学约束,同时在原有bug避障算法的基础上重新定义机器人驶离障碍物位置点,减少在进行避障行为时产生的局部冗余路径,提高路径规划的效率,优化作业。
37、在本储油罐作业机器人的防缠绕路径规划方法中,采用对障碍物增加包络圆约束并利用矢径法重新定义避障行为结束位置的方案,使移动机器人所生成的路径消除了尖锐拐点,路径更加贴合机器人动力学约束,减少了大量冗余路径的生成,极大提升路径规划效率,同时节省路径的效果会随着障碍物的数量的形状复杂程度的提高而提升。
38、并且使障碍物在电子地图中表现为圆形,这样其生成的避障轨迹就是一条光滑的曲线,贴合机器人动力学约束,避免在油泥中打滑,保证机器人行进的平稳性。
39、在本储油罐作业机器人的防缠绕路径规划方法中,机器人所需要做的工作为清理和检测罐底板,这就需要对区域和时间的划分尤为精准,本方案的区域划分与机器人的“先清理后检测”的方案相结合,从时间和空间两个方面入手,能够在机器人无遗漏完成作业的同时有效避免机器人发生线缆缠绕。极大提高工作效率,减少不必要的损耗。
- 还没有人留言评论。精彩留言会获得点赞!