一种基于天车搬运系统的速度规划方法及系统与流程
本发明涉及速度规划,尤其涉及一种基于天车搬运系统的速度规划方法及系统。
背景技术:
1、随着半导体行业的不断发展,制造商面临着提高生产效率和降低成本的挑战。天车搬运系统(overhead hoist transfer ,简称为oht)是半导体制造厂中一种重要的自动搬运系统,通过提高物料运输效率,降低人力成本和减少污染风险,从而在很大程度上改善了整体生产流程。
2、目前无人天车所采用的伺服系统常见的控制方式有三种,即转矩控制(电流环)、速度控制(电流环、速度环)、位置控制(电流环、速度环、位置环)。在现有技术中,中国专利cn115202293a公开了一种工业机器人两段式速度规划方法,将传统的速度规划方法分为两段速度规划,一是在轨迹优化前的轨迹进行速度预规划,二是在轨迹优化阶段后进行速度优化。中国专利cn115963782a公开了一种基于初始加速度不为零的s型速度规划方法,在初始加速度不为零的情况下规划出一条平滑的轨迹,可以保证位置、速度和加速度的连续平滑过渡。
3、上述技术方案,虽然在一定程度上对速度进行优化,但还存在以下缺点:(1)可能出现速度超过速度阈值限制(影响稳定性)现象,破坏速度优化的结果;(2)由于公式过于复杂、推导及编程难度大,使得实现起来困难、运行时计算量大。
技术实现思路
1、为此,本发明实施例提供了一种基于天车搬运系统的速度规划方法及系统,用于解决现有技术中天车在运行过程超速、行走不流畅、规划的位置无法到达的问题,实现高效且便捷的天车速度动态规划,提高天车在运输过程中的效率及稳定性。
2、为了解决上述问题,本发明实施例提供一种基于天车搬运系统的速度规划方法,所述方法包括:
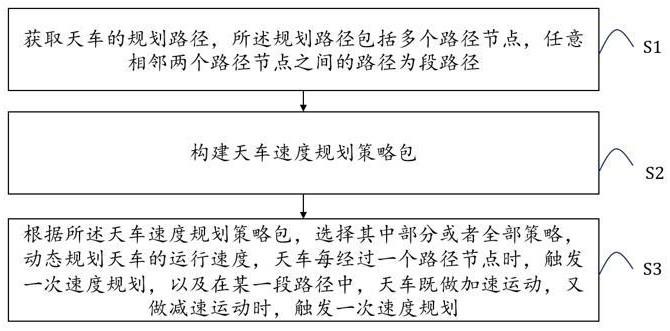
3、获取天车的规划路径,所述规划路径包括多个路径节点,任意相邻两个路径节点之间的路径为段路径;构建天车速度规划策略包,所述天车速度规划策略包具体包括:
4、策略1:天车到达当前段路径的重规划位置时,则将当前速度调整到下一段规划速度;
5、策略2:下一段规划速度大于当前段规划速度,天车按当前段最高速度运行至下一段路径;
6、策略3:下一段规划速度大于当前速度并且一直加速都达不到下一段规划速度,天车直接加速到当前段最高速度;
7、策略4:下一段规划速度小于当前速度并且一直减速都将超过下一段规划速度,天车直接规划减速;
8、策略5:下一段规划速度小于当前段规划速度,加速不到当前段规划速度时就需要减速,才能保证进入下一段路径时的速度不超速,天车在该段路径运行过程中无匀速阶段;
9、策略6:下一段规划速度小于当前段规划速度,重规划距离小于设定距离,天车直接减速;
10、策略7:下一段规划速度小于当前段规划速度,加速到当前段规划速度且匀速行驶一段距离后,天车重新规划速度,保证进入下一段路径时的速度不超速;
11、根据所述天车速度规划策略包,选择其中部分或者全部策略,动态规划天车的运行速度,天车每经过一个路径节点时,触发一次速度规划,以及在某一段路径中,天车既做加速运动,又做减速运动时,触发一次速度规划。
12、优选地,在所述路径节点处设置有条形码,用于定位和计算当前路径节点到终点的距离、路径节点的运行方向以及当前段最高运行速度。
13、优选地,天车设置有扫描装置,用于扫描路径节点处的条形码信息,获得当前路径节点到终点的距离、路径节点的运行方向以及当前段最高运行速度。
14、优选地,各个段路径的初始最大速度计算方法为:
15、设定天车获取的规划路径有两个段路径s1、s2,其中段路径s1给定的速度为v1,段路径s2给定的速度为v2,减速度统一为a;
16、将段路径s2末尾的速度看作是0,计算出进入段路径s2的起始节点处最大速度;假设进入段路径s2的初始速度为vstart2,段路径s2的终点速度为vend2,根据速度公式:,将vend2看作0,则可得到vstart2;然后从vstart2和v2之间取最小值,得到进入段路径s2的起始节点处初始最大速度vmax2;
17、从后往前推算进入前一段路径的初始速度,假设进入段路径s1的初始速度为vstart1,根据速度公式:,则可得到vstart1,然后从vstart1和v1之间取最小值,得到进入段路径s1的起始节点处初始最大速度;
18、如果规划路径由多个段路径组成,从后往前依次类推,则规划出进入所有段路径的初始最大速度。
19、优选地,所述重规划距离为:
20、在某一段路径中,当天车既做加速运动,又做减速运动时,则触发一次速度规划,将触发点到该段路径的起始路径节点的距离设为重规划距离。
21、优选地,基于天车规划路径,根据构建的天车速度规划策略包,动态的规划天车的运行速度,以使得所述天车到达终点的方法具体包括:
22、步骤一:判断天车是否到达当前段路径的重规划位置,如果是,则采用策略1,直接将当前速度调整到下一段规划速度;如果否,则计算剩下的路径距离以及所有段路径的最高进入速度;
23、步骤二:判断下一段规划速度是否大于当前段规划速度,如果是,则采用策略2,按当前段最高速度规划加减速运动;如果否,则执行步骤三;
24、步骤三:判断下一段规划速度是否大于当前实时速度,如果是,则执行步骤四;如果否,则执行步骤五;
25、步骤四:判断当前位置加速到下一段规划速度所需要的距离是否大于当前位置到下一段路径的距离,如果是,则采用策略3,按下一段路径最高速度规划加速运动;如果否,则执行步骤六;
26、步骤五:判断当前位置减速到下一段规划速度所需要的距离是否大于当前位置到下一段路径的距离,如果是,则采用策略4,按下一段路径最高速度规划减速运动;如果否,则执行步骤六;
27、步骤六:计算加速到当前段规划速度的距离以及当前段规划速度减速到下一段规划速度所需要的距离;
28、步骤七:判断段路径中是否有匀速区间,如果是,则执行步骤八;如果否,则采用策略5,按计算出的允许最高速度规划加减速运动;
29、步骤八:判断重规划距离是否小于设定距离,如果是,则采用策略6,按下一段最高速度规划减速运动;如果否,则采用策略7,按当前段规划速度规划加减速运动;
30、步骤九:直至天车运行到终点,结束速度规划。
31、本发明实施例还提供了一种基于天车搬运系统的速度规划系统,用于实现上述所述的基于天车搬运系统的速度规划方法,所述系统包括:
32、获取模块,用于获取天车的规划路径,所述规划路径包括多个路径节点,任意相邻两个路径节点之间的路径为段路径;
33、策略构建模块,用于构建天车速度规划策略包,所述天车速度规划策略包具体包括:
34、策略1:天车到达当前段路径的重规划位置时,则将当前速度调整到下一段规划速度;
35、策略2:下一段规划速度大于当前段规划速度,天车按当前段最高速度运行至下一段路径;
36、策略3:下一段规划速度大于当前速度并且一直加速都达不到下一段规划速度,天车直接加速到当前段最高速度;
37、策略4:下一段规划速度小于当前速度并且一直减速都将超过下一段规划速度,天车直接规划减速;
38、策略5:下一段规划速度小于当前段规划速度,加速不到当前段规划速度时就需要减速,才能保证进入下一段路径时的速度不超速,天车在该段路径运行过程中无匀速阶段;
39、策略6:下一段规划速度小于当前段规划速度,重规划距离小于设定距离,天车直接减速;
40、策略7:下一段规划速度小于当前段规划速度,加速到当前段规划速度且匀速行驶一段距离后,天车重新规划速度,保证进入下一段路径时的速度不超速;
41、处理模块,用于根据所述天车速度规划策略包,选择其中部分或者全部策略,动态规划天车的运行速度,天车每经过一个路径节点时,触发一次速度规划,以及在某一段路径中,天车既做加速运动,又做减速运动时,触发一次速度规划。
42、本发明实施例还提供了一种天车,包括上述所述的基于天车搬运系统的速度规划系统。
43、本发明实施例还提供了一种电子装置,所述电子装置包括处理器、存储器和总线系统,所述处理器和存储器通过该总线系统相连,所述存储器用于存储指令,所述处理器用于执行存储器存储的指令,以实现上述所述的基于天车搬运系统的速度规划方法。
44、本发明实施例还提供了一种计算机存储介质,所述计算机存储介质存储有计算机软件产品,所述计算机软件产品包括的若干指令,用以使得一台计算机设备执行上述所述的基于天车搬运系统的速度规划方法。
45、从以上技术方案可以看出,本发明申请具有以下优点:
46、本发明实施例中提供的一种基于天车搬运系统的速度规划方法及系统,可以保证天车在运行过程中更加平稳,且整个规划过程都将速度最大化考虑进去,能整体提高运输效率。同时本发明解决了天车在实际运行过程中,到不了终点位置或超速的问题。
- 还没有人留言评论。精彩留言会获得点赞!