一种动平台光电设备高角区采用横滚陀螺的抗扰控制方法与流程
本发明属于自动控制,主要涉及控制方法,尤其涉及一种动平台光电设备高角区采用横滚陀螺的抗扰控制方法。
背景技术:
1、对于近程反导系统中的光电设备,要求其高角覆盖范围尽可能大,通常需要高角覆盖到85°,传统两轴地平式光电设备采用俯仰轴叠加于方位轴框架结构(图2),此种结构具有结构描述形式简单,控制机理成熟的优点,当系统安装于车辆、舰船的运动平台,系统使用将受平台扰动,基于克服平台扰动的需求,方位陀螺安装于俯仰框架上,方位陀螺敏感轴与视线坐标系(定义见图4)下侧倾旋转轴d轴一致,与方位电机旋转轴并不一致,其敏感轴随俯仰角变化,敏感轴随俯仰角变化空间关系可由图5描述,受方位电机旋转轴与方位陀螺敏感轴固有空间约束,光电设备伺服控制系统直接控制的是电机旋转轴,在对方位电机旋转轴控制时,方位陀螺数据需要经过正割补偿才可以作为方位电机旋转轴速率闭环控制的反馈数据使用,即以作为方位电机旋转轴速率闭环控制的反馈数据,该方式下的控制原理见图6,其中ωh为方位陀螺输出的其敏感方向上的惯性角速率,ε为光电设备在平台坐标系下(图3)俯仰角。ωh作为陀螺测量数据,必然包含测量噪声n,n通过放大后,将对系统稳定产生影响,如当ε∈[80°,85°]时,测量噪声n被放大了6~11倍,这将严重降低系统的稳定性,为了确保系统稳定,传统光电设备方位电机旋转轴控制通常会对高角区域的动态性能进行限制,如减小速率回路带宽或者限制正割值等,这虽然起到了提高系统稳定性的作用,但相应带来瞄准精度的下降。
2、需要说明的是传统两轴地平式光电设备两轴陀螺安装方式,方位陀螺敏感轴(图2)正好对应了视线坐标系下的侧倾方向旋转轴(图4视线坐标系下d轴),所以可以敏感到动平台对瞄准线在侧倾方向的扰动量;本发明将用到平台惯性速率,通常光电设备安装平台上都配备惯导,用于输出平台姿态、角速率、线速度等。
3、就国内外动平台光电设备高角区横滚陀螺的使用方法,与本发明相同的方法未见公开报道。
技术实现思路
1、(一)发明目的
2、本发明的目的是:提供一种动平台光电设备高角区采用横滚陀螺的抗扰控制方法,解决动平台光电设备在高角区间抗扰性能和稳定性不能兼顾的问题,提高光电设备在高角区间的工作性能。
3、(二)技术方案
4、为了解决上述技术问题,本发明在俯仰框架上增装一只横滚陀螺用于敏感瞄准线旋转角速率,其横滚陀螺敏感轴示意见图7,如果不考虑动平台干扰影响,横滚陀螺敏感轴与方位电机旋转轴由图8所示固有空间关系决定,对方位电机旋转轴控制时,横滚陀螺数据需要经过余割补偿才可以作为方位电机旋转轴速率闭环控制的反馈数据使用,即以作为方位电机旋转轴速率闭环控制的反馈数据,其中ωr为横滚陀螺测量速率,同样ωr作为测速反馈元件,存在测量噪声n,n会通过放大,显然,随着ε向高角趋近放大倍率在减小,即余割补偿对噪声的放大作用在减小,与使用方位陀螺数据时的正割补偿正好相反。如果方位电机旋转轴速率闭环控制的反馈数据,在高角使用低角使用就很程度上规避单独使用方位陀螺时高角对测量噪声放大问题,提高系统稳定性。高角使用横滚陀螺,系统控制的稳定问题解决了,却由于横滚陀螺敏感轴与侧倾轴(视线坐标系d轴)空间关系使横滚陀螺测量中不包含侧倾扰动,使得单独使用横滚陀螺测量速率闭环控制,并不能隔离动平台侧倾扰动。光电设备瞄准过程最关心的是减小视线坐标系侧倾(方位)误差和俯仰误差,由于横滚陀螺与侧倾方向的旋转轴(视线坐标系d轴)垂直,不能敏感侧倾方向动平台对瞄准线的扰动,所以如果在高角使用数据进行方位电机旋转轴速率闭环控制,系统在方位旋转向上不具备克服侧倾扰动的能力,侧倾误差受平台扰动而增大,导致系统无法瞄准目标。为了解决高角使用横滚陀螺时敏感侧倾方向平台扰动问题,本发明由横滚陀螺数据结合平台姿态速率及光电设备角位置获得包含侧倾扰动速率的方位向电机旋转轴速率闭环的反馈数据,在高角区间构成速率稳定环,即保证了高角区间光电设备工作的稳定性,也使其具备了动平台抗扰能力,提高了地平两轴系统高角区间瞄准精度。
5、本发明动平台光电设备高角区采用横滚陀螺的抗扰控制方法运行硬件平台根据系统配置不同,可以由光电设备伺服系统或者中心控制计算机完成,该方法实现的前提条件如下:
6、01:光电设备可获得平台姿态角速率:包括平台纵摇角速率ωp、平台横摇角速率ωr,该条件通常都可以满足,平台姿态角速率方向遵循右手法则。横摇角速率ωr,以平台零位指向为旋转轴线,左抬高为正,左下沉为负;纵摇角速率ωp,旋转轴垂直与平台零位指向,平台零位指向向上运动为正,向下运动为负;
7、02:光电设备各控制环路功能正常;
8、03:光电设备安装有方位陀螺、横滚陀螺,分别敏感侧倾角速率(图2)ωh和瞄准线横滚方向角速率(图4)ωr;
9、04:光电设备数据采集输出等功能正常,β、ε是光电设备平台坐标系下方位角和俯仰角。
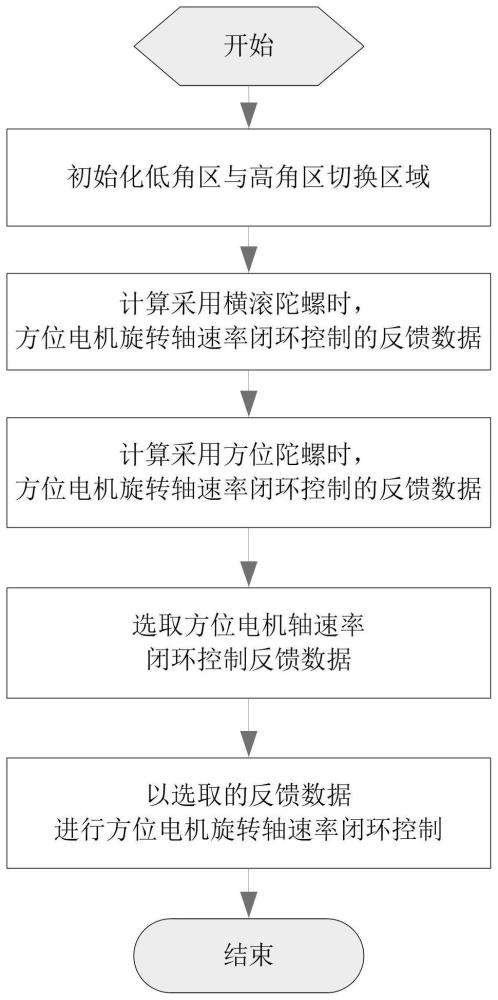
10、在上述工作完成基础上,本发明主要针对方位电机旋转轴速率环路的反馈数据进行操作,并最终采用获取的反馈数据进行方位电机旋转轴速率闭环控制,控制方法将按照图1所示的工作流程执行以下步骤:
11、步骤1:初始化。
12、初始化低角区和高角区切换过渡区域[θ0,θ1],该区域的存在是为了确保切换过程稳定。
13、步骤2:计算单独采用横滚陀螺时,方位电机旋转轴旋转轴速率闭环控制的反馈数据。
14、
15、其中,ωm_r为采用横滚陀螺时电机旋转轴速率闭环控制的反馈数据,β为光电设备方位角位置,ε为光电设备在平台坐标系下的俯仰角。
16、步骤3:计算单独采用方位陀螺时,方位电机旋转轴速率闭环控制的反馈数据。
17、
18、其中,ωm_h为采用方位陀螺时电机旋转轴速率闭环控制的反馈数据。
19、步骤4:基于ωm_r和ωm_h获取综合横滚陀螺后方位电机旋转轴速率闭环控制反馈数据。
20、步骤4.1:如果ε>θ1,方位电机旋转轴速率闭环反馈数据采用ωm=ωm_r,否则执行步骤4.2;
21、步骤4.2:如果ε<θ0,方位电机旋转轴速率闭环反馈数据采用ωm=ωm_h,否则执行步骤4.3;
22、步骤4.3:如果ε∈[θ0,θ1],方位电机旋转轴速率闭环反馈数据
23、步骤5:采用ωm作为方位电机旋转轴速率闭环控制反馈数据进行速率闭环。
24、(三)有益效果
25、上述技术方案所提供的动平台光电设备高角区采用横滚陀螺的抗扰控制方法,具有以下有益效果:
26、(1)该方法提高了两轴地平式光电设备高角区间工作稳定性,操作限制在光电设备方位电机旋转轴速率环反馈数据的获取方式上,是一个独立程序模块,具有模块化易扩展的优点;
27、(2)该方法提高了动平台安装两轴地平式光电设备高角区域的抗扰性能,提高了系统高角指向精度;
28、(3)就国内外动平台光电设备横滚陀螺使用方法,与本发明相同的控制方法未见公开报道。
- 还没有人留言评论。精彩留言会获得点赞!