一种应用于机场草坪的割草机的路径控制方法、系统及存储介质与流程
本发明涉及割草机,尤其是涉及一种应用于机场草坪的割草机的路径控制方法、系统及存储介质。
背景技术:
1、机场草坪不但能吸附尘土、还能美化机场的环境,但草坪也能引来飞鸟、吹散的杂草也对飞机的飞行安全造成了一定的安全影响,因此,需要机场鸟防部门定期对草坪进行喷药、修剪等养护处理。目前草坪的修剪方式先由拖拉机带动剪草机按接照一定的高度(7-8cm)进行割草,然后由人工对剪断的碎草进行收集。据了解,在草坪的生长期,每15天需进行一次割草作业,在南方的部分机场,在夏季雨季来临时,草坪的草生长更快,基本上每周需修剪一次,由于机场草坪面积较大,往往刚完成一轮的修剪工作,新的一轮修剪工作又要开始,鸟防部门需投入较多的人力、工作量也较大。如果能够定期有一种能够自动修剪草坪机械投入,将为机场带来良好效益。
技术实现思路
1、鉴于以上问题,本发明提供了一种应用于机场草坪的割草机的路径控制方法、系统及存储介质,不仅机场草坪的割草工作整个过程无需人工进行参与,而且路径优化提高了割草机的工作效率,降低割草机的能量消耗。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种应用于机场草坪的割草机的路径控制方法,所述方法包括:
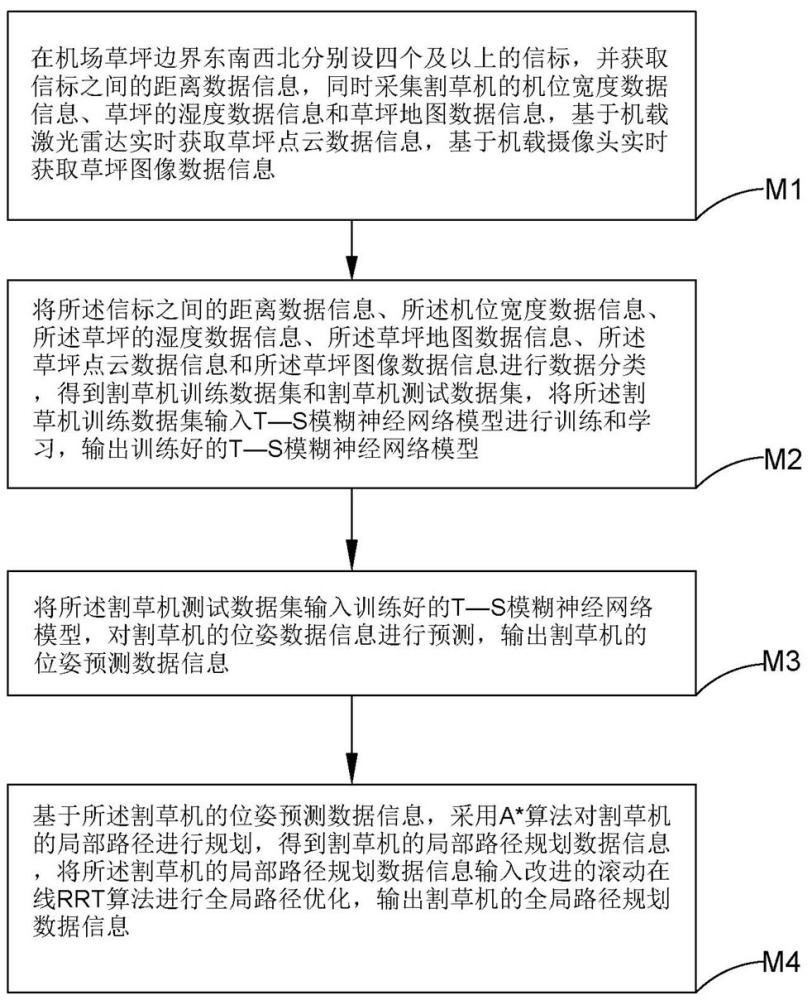
4、m1.在机场草坪边界东南西北分别设四个及以上的信标,并获取信标之间的距离数据信息,同时采集割草机的机位宽度数据信息、草坪的湿度数据信息和草坪地图数据信息,基于机载激光雷达实时获取草坪点云数据信息,基于机载摄像头实时获取草坪图像数据信息;
5、m2.将所述信标之间的距离数据信息、所述机位宽度数据信息、所述草坪的湿度数据信息、所述草坪地图数据信息、所述草坪点云数据信息和所述草坪图像数据信息进行数据分类,得到割草机训练数据集和割草机测试数据集,将所述割草机训练数据集输入t—s模糊神经网络模型进行训练和学习,输出训练好的t—s模糊神经网络模型;
6、m3.将所述割草机测试数据集输入训练好的t—s模糊神经网络模型,对割草机的位姿数据信息进行预测,输出割草机的位姿预测数据信息;
7、m4.基于所述割草机的位姿预测数据信息,采用a*算法对割草机的局部路径进行规划,得到割草机的局部路径规划数据信息,将所述割草机的局部路径规划数据信息输入改进的滚动在线rrt算法进行全局路径优化,输出割草机的全局路径规划数据信息。
8、进一步的,在步骤m2中,所述将所述割草机训练数据集输入t—s模糊神经网络模型进行训练和学习包括:
9、m21.基于所述割草机的训练数据集,构建对应的权重分析函数g(x),
10、,
11、其中,x为割草机的训练数据集,α、β和γ为常量参数,得到割草机的权重分析矩阵数据信息;
12、m22.基于所述割草机的权重分析矩阵数据信息,建立t—s模糊神经网络的中间层激活函数f,
13、,
14、其中,m为采样层数,n为割草机训练数据集的采样个数,aij为第j层第i个割草机训练数据集的激活矩阵数据信息,g为对应的权重分析函数,xij为第j层第i个割草机训练数据集,g为elu激活函数,得到割草机的激活矩阵数据信息;
15、m23.基于所述割草机的激活矩阵数据信息,建立t—s模糊神经网络的第j层的输出层的函数qj,
16、,
17、其中,g为elu激活函数,aij为第j层第i个割草机训练数据集的激活矩阵数据信息,g为对应的权重分析函数,n为割草机训练数据集的采样个数,得到割草机的位姿预测数据信息。
18、进一步的,在步骤m22中,所述elu激活函数为g,
19、,
20、其中,θ为elu激活函数的常量参数,x为自变量。
21、进一步的,在步骤m4中,所述采用a*算法对割草机的局部路径进行规划包括:
22、m411.基于所述割草机的位姿预测数据信息,采用时间序列划分法进行数据划分,得到割草机的位姿时间序列数据信息;
23、m412.基于所述割草机的位姿时间序列数据信息,建立割草机的路径代价函数d(x),
24、,
25、其中,q为割草机位姿时间序列中节点的个数,xk为割草机的第k个位置坐标数据信息,x为每个割草机的位姿时间序列的中间点的位置坐标数据信息;
26、m413.基于所述割草机的路径代价函数d(x),并判断每个割草机的位置时间序列中路径最优值,输出割草机的局部路径规划数据信息。
27、进一步的,在步骤m413中,所述并判断每个割草机的位置时间序列中路径最优值为根据所述割草机的路径代价函数d(x),得到路径代价的节点的最小值,连接节点,得到每个割草机的位置时间序列中路径最小值。
28、进一步的,在步骤m4中,将所述割草机的局部路径规划数据信息输入改进的滚动在线rrt算法进行全局路径优化包括:
29、m421.获取所述割草机的局部路径规划数据信息,进行五次多项式算法进行轨迹拟合,输出全局路径轨迹拟合数据信息;
30、m422.基于所述全局路径轨迹拟合数据信息,采用最小二乘算法进行局部路径优化,输出割草机的全局路径规划数据信息。
31、进一步的,在步骤m422中,所述采用最小二乘算法进行局部路径优化为设置预设误差值,若所述全局路径轨迹拟合数据信息与所述割草机的局部路径规划数据信息的误差值小于设置预设误差值则路径不变,若所述全局路径轨迹拟合数据信息与所述割草机的局部路径规划数据信息的误差值大于设置预设误差值则将所述全局路径轨迹拟合数据信息和所述割草机的局部路径规划数据信息均值化后,得到优化后的局部路径,将所述优化后的局部路径与所述全局路径轨迹拟合数据信息拟合。
32、进一步的,在步骤m4中,基于所述割草机的全局路径规划数据信息,采用bug算法对路径中的障碍物进行识别和排除,所述bug算法为基于所述草坪的点云数据信息和所述草坪的图像数据信息,进行融合并识别草坪中的障碍物数据信息,设置预设阈值,若障碍物的数据信息超过预设阈值则停止进行语音播报提醒人员进行排除,若障碍物的数据信息未超过预设阈值则继续进行割草任务。
33、为了实现上述目的及其他相关目的,本发明还提供了一种应用于机场草坪的割草机的路径控制系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的应用于机场草坪的割草机的路径控制方法的步骤。
34、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的应用于机场草坪的割草机的路径控制方法的计算机程序。
35、本发明具有以下积极效果:
36、1.本发明通过采用t—s模糊神经网络模型对信标之间的距离数据信息、机位宽度数据信息、草坪的湿度数据信息、草坪地图数据信息、草坪点云数据信息和草坪图像数据信息进行处理,并得到割草机位姿预测数据信息,为割草机的整体路径规划提供了准确的数据支持,不仅得到的路径规划数据信息更加准确,而且降低了割草机行驶过程的出错率。
37、2.本发明先通过a*算法得到割草机的局部路径规划数据信息,结合改进的滚动在线rrt算法进行全局路径规划,分布式对数据进行处理并融合,使得割草机运行过程中更加工作效率更高,降低能量消耗,与此同时,全程无需人工进行参与,降低了人工劳动成本。
- 还没有人留言评论。精彩留言会获得点赞!