一种拣货路径规划方法、系统及电子设备
本发明涉及拣货机器人控制,特别是涉及一种拣货路径规划方法、系统及电子设备。
背景技术:
1、在电商仓库中,面对日常的小批量多品种的需求订单,每天的拣货任务都是基于前一天收到的订单数量,而仓库中的作业分配、订单分批、路径计算等算法工作大多数都是在拣货的前一天晚上所进行的,因此算法有非常充分的计算时间,或者可以通过更长的算法迭代次数或运行时间来换取更优的求解结果。但当电商仓库面临着促销活动(如双十一、618等节日)或者突发的外部事件影响(网红爆款、直播带货等事件),造成订单量激增且需求波动较大,带来的是更加繁忙的拣货任务和高度不确定的需求,在这种情况下常规算法的实现较为困难:一是没有充足的时间留给算法进行计算,花费大量时间通过算法来优化可能会造成更大的时间损失成本,算法的优化效果无法弥补等待时间所造成的损失;二是算法的求解难度会随着订单规模的增加而增加,相较于平时的订单数量突发的大规模订单算法较难在相同时间内完成优秀的求解。因此面对这种情况的时候,大部分电商仓库会选择增加人力成本来完成拣货而并非完全依赖于算法,因为这种大促活动或突发事件并不会持续太久,更需要保障的是拣货的效率而非拣货的成本,通过临时外包拣货人员的成本远低于所带来的拣货效率上的收益,算法更多的只是成为一种辅助的手段。
2、仓库订单拣货问题属于运筹学中的经典组合优化问题,组合优化指在有限个可能解的集合中找出最优解的优化问题。传统上解决组合优化问题的方法可以分为精确方法和启发式方法,前者能够保证找到最优解,后者则以解的质量换取计算成本。大部分组合优化问题是非确定性多项式困难(np—hard)的,问题复杂度随着问题规模的增大而指数级上升,不存在有效的多项式时间解,因此人们设计了许多近似或启发式算法对其进行求解,启发式算法的优势在于能够在较短的时间内搜寻到问题的较优解甚至最优解,但随着问题复杂度的提升,启发式算法通常得到的都是次优解。在面临更大规模的订单下也会出现求解速度慢、求解质量低的问题,因此很有必要对这种突发的大规模订单下的仓库拣货问题进行研究。面临仓库内激增的订单数量,算法如何快速地做出决策并保证决策的一定质量,实现优化算法在短时间内的快速响应是目前需要解决的难点。
技术实现思路
1、本发明的目的是提供一种拣货路径规划方法、系统及电子设备,能够提高拣货路径规划效率和合理性。
2、为实现上述目的,本发明提供了如下方案:
3、一种拣货路径规划方法,所述方法应用于一种拣货机器人,所述拣货路径规划方法,包括:
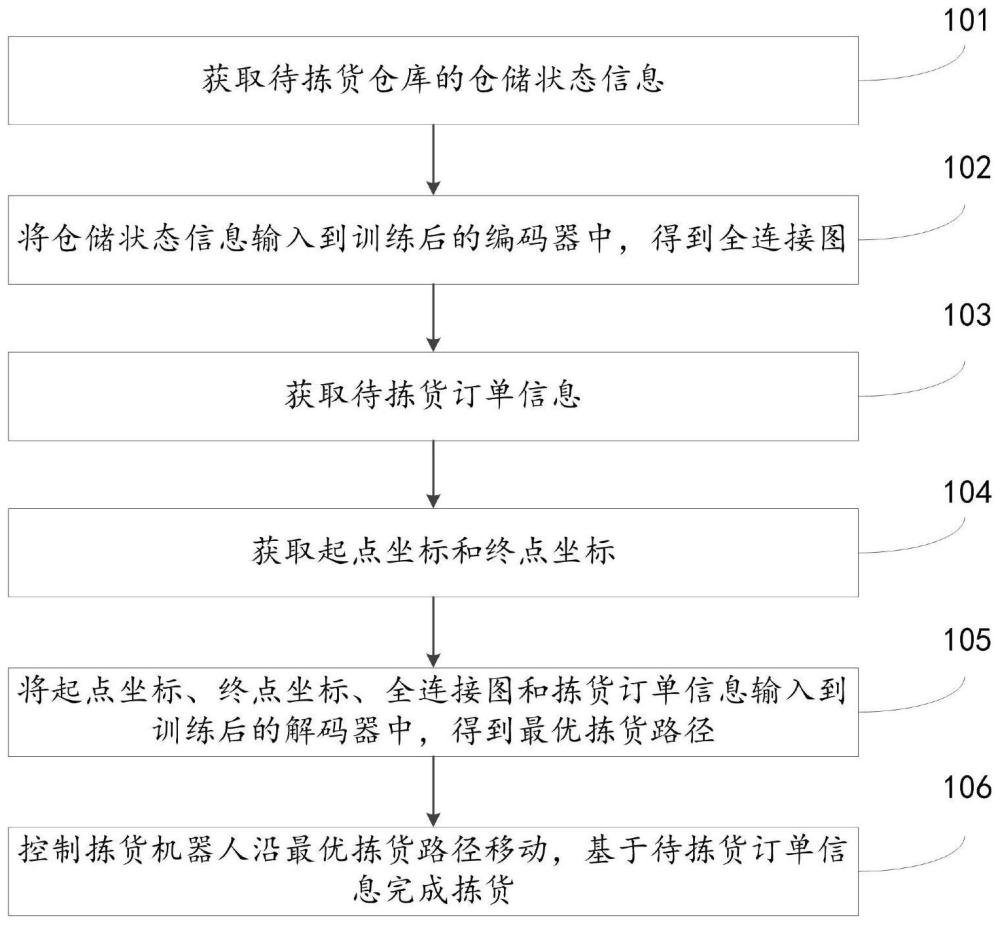
4、获取待拣货仓库的仓储状态信息;所述仓储状态信息包括待拣货仓库中每个储位的坐标,以及不同储位的存储货物类型和存储货物数量;同一储位处存储的多个货物的类型均相同;存在多个储位的存储货物类型相同;
5、将所述仓储状态信息输入到训练后的编码器中,得到全连接图;所述全连接图中的节点与所述待拣货仓库中的储位一一对应;所述全连接图中任一节点的节点属性为对应储位的坐标、存储货物类型和存储货物数量;
6、获取待拣货订单信息;所述待拣货订单信息包括:待拣货物类型,以及待拣货物类型对应的待拣货物数量;
7、获取起点坐标和终点坐标;
8、将所述起点坐标、所述终点坐标、所述全连接图和所述拣货订单信息输入到训练后的解码器中,得到最优拣货路径;所述训练后的编码器和训练后的解码器是利用多个历史仓储状态信息和多个历史订单信息对编码器和解码器进行同步训练后得到的;所述解码器是添加了掩码机制的注意力模型;
9、控制拣货机器人沿所述最优拣货路径移动,基于待拣货订单信息完成拣货。
10、可选的,所述起点坐标和终点坐标相同。
11、可选的,在获取待拣货仓库的仓储状态信息之前,还包括:
12、获取仓库的历史仓储状态信息;
13、将历史仓储状态信息输入到编码器中,得到历史全连接图;
14、获取历史订单信息;
15、获取历史起点坐标和历史坐标;
16、将所述历史全连接图、所述历史订单信息、所述历史起点坐标和所述历史坐标输入到解码器中,得到最优历史拣货路径;
17、根据最优历史拣货路径更新编码器参数和解码器参数,更新历史仓储状态信息,返回步骤“将历史仓储状态信息输入到编码器中,得到历史全连接图”直至迭代达到迭代次数,得到训练后的编码器和训练后的解码器。
18、可选的,将所述起点坐标、所述终点坐标、所述全连接图和所述拣货订单信息输入到训练后的解码器中,得到最优拣货路径,包括:
19、构建空集为初始拣货路径坐标序列;
20、将所述起点坐标作为第1个元素,添加到初始拣货路径坐标序列中,得到1阶拣货路径坐标序列;
21、令元素主序号i=2;
22、确定任一待拣货物类型为当前待拣货物类型;
23、确定当前待拣货物类型对应的待拣货物数量为当前待拣货物数量;
24、在所述全连接图中确定存储货物类型为当前待拣货物类型的多个储位为待定储位;
25、根据当前待拣货物数量和多个待定储位,以及每个待定储位的存储货物数量,确定多个i阶拣货路径坐标序列;
26、在全连接图中对当前待定储位进行掩码处理;
27、更新当前待拣货物类型,令元素主序号i的数值增加1,并返回步骤“确定当前待拣货物类型对应的待拣货物数量为当前待拣货物数量”直至遍历所有待拣货物类型,将所述终点坐标作为拣货路径坐标序列中的第i+1个元素,依次添加到每个i阶拣货路径坐标序列中,得到多个i+1阶拣货路径坐标序列;
28、根据多个i+1阶拣货路径坐标序列确定多条拣货路径;
29、计算每条拣货路径的路径长度;
30、按照所述路径长度对多个i+1阶拣货路径坐标序列进行降序排列;
31、确定所述路径长度最短的i+1阶拣货路径坐标序列,为最优拣货路径。
32、可选的,根据当前待拣货物数量和多个待定储位,以及每个待定储位的存储货物数量,确定多个i阶拣货路径坐标序列,包括:
33、确定任一待定储位为当前待定储位;
34、确定除当前待定储位之外的待定储位为当前非待定储位;
35、确定空集为当前元素序列;
36、将当前待定储位的坐标作为末位元素添加到当前元素序列中;
37、判断当前待定储位的存储货物数量是否小于当前待拣货物数量,得到判断结果;
38、若所述判断结果为否,则将当前元素序列作为第i个元素,添加到i-1阶拣货路径坐标序列,得到当前待定储位对应的i阶拣货路径坐标序列;
39、若所述判断结果为是,则确定当前待拣货物数量与当前待定储位的存储货物数量之差为当前待拣货物数量,获取任一当前非待定储位为当前待定储位,并返回步骤“将当前待定储位的坐标作为末位元素添加到当前元素序列中”直至遍历所有当前非待定储位,将当前元素序列作为第i个元素,添加到i-1阶拣货路径坐标序列,得到当前待定储位对应的i阶拣货路径坐标序列;
40、更新当前待定储位,并返回步骤“确定除当前待定储位之外的待定储位为当前非待定储位”直至遍历所有待定储位,得到每个待定储位对应的i阶拣货路径坐标序列。
41、一种拣货路径规划系统,包括:
42、仓储状态信息获取模块,用于获取待拣货仓库的仓储状态信息;所述仓储状态信息包括待拣货仓库中每个储位的坐标,以及不同储位的存储货物类型和存储货物数量;同一储位处存储的多个货物的类型均相同;存在多个储位的存储货物类型相同;
43、编码模块,用于将所述仓储状态信息输入到训练后的编码器中,得到全连接图;所述全连接图中的节点与所述待拣货仓库中的储位一一对应;所述全连接图中任一节点的节点属性为对应储位的坐标、存储货物类型和存储货物数量;
44、订单信息获取模块,用于获取待拣货订单信息;所述待拣货订单信息包括:待拣货物类型,以及待拣货物类型对应的待拣货物数量;
45、坐标获取模块,用于获取起点坐标和终点坐标;
46、最优拣货路径确定模块,用于将所述起点坐标、所述终点坐标、所述全连接图和所述拣货订单信息输入到训练后的解码器中,得到最优拣货路径;所述训练后的编码器和训练后的解码器是利用多个历史仓储状态信息和多个历史订单信息对编码器和解码器进行同步训练后得到的;所述解码器是添加了掩码机制的注意力模型;
47、拣货机器人控制模块,用于控制拣货机器人沿所述最优拣货路径移动,基于待拣货订单信息完成拣货。
48、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种拣货路径规划方法。
49、可选的,所述存储器为可读存储介质。
50、根据本发明提供的具体实施例,本发明公开了以下技术效果:
51、本发明提供的一种拣货路径规划方法、系统及电子设备,通过强化学习模型(本发明中使用的注意力模型)完成拣货路径规划,训练好的强化学习模型的运行时间会大大减少,并且许多研究在实验中验证了其求解效果与最优秀的启发式方法和求解器表现相当;强化学习模型可以判断出启发式算法中难以发现的有用的规则,特别是在大规模问题中;尝试提高该联合优化模型的求解速度,解决启发式算法在大规模订单下求解较慢的问题,提高双层优化模型的求解效率。
- 还没有人留言评论。精彩留言会获得点赞!