交互方法、装置、电子设备及存储介质与流程
本公开涉及机器人的人机交互,具体涉及一种交互方法、装置、电子设备及存储介质。
背景技术:
1、近年来,随着科学技术的进步,逐步出现了扫地机器人、多足机器人、人形机器人等机器人,这些机器人能够在生产和生活中辅助或替代人类进行劳动,从而降低人类的劳动量。例如,较为常见的扫地机器人能够替代人类进行房屋的清洁工作,从而使用户省去了繁重的家务劳动。用户可以直接控制扫地机器人,或者通过在智能设备上安装交互程序来控制扫地机器人。相关技术中,扫地机器人的交互程序中的交互界面较为复杂,交互逻辑不清晰,重要功能的发现和调取不方便,造成用户的操作便捷度较低,使用体验较差。
技术实现思路
1、为克服相关技术中存在的问题,本公开实施例提供一种交互方法、装置、电子设备及存储介质,用以解决相关技术中的缺陷。
2、根据本公开实施例的第一方面,提供一种交互方法,应用于与机器人预先建立连接的终端设备,所述方法包括:
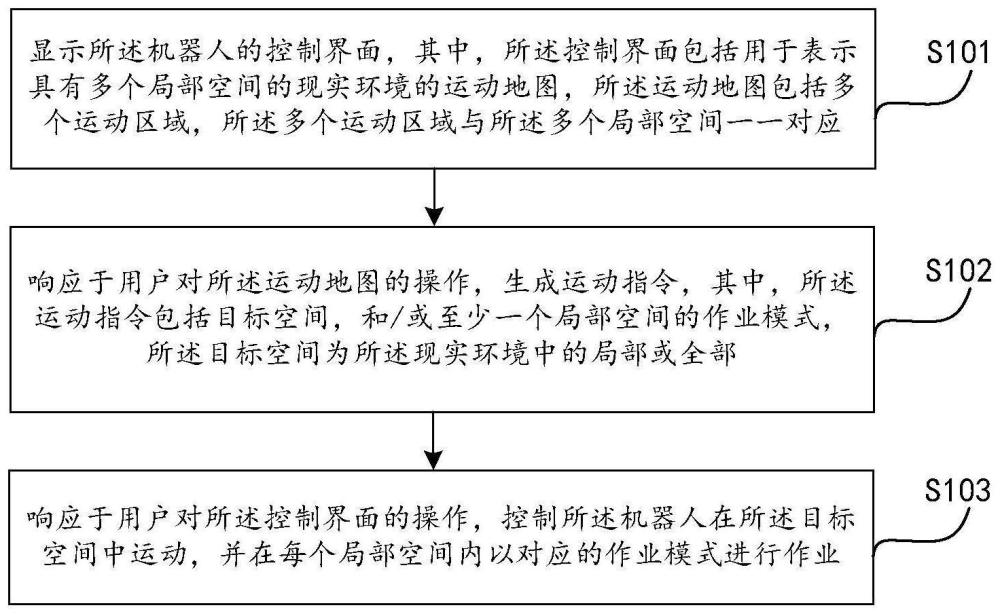
3、显示所述机器人的控制界面,其中,所述控制界面包括用于表示具有多个局部空间的现实环境的运动地图,所述运动地图包括多个运动区域,所述多个运动区域与所述多个局部空间一一对应;
4、响应于用户对所述运动地图的操作,生成运动指令,其中,所述运动指令包括目标空间,和/或至少一个局部空间的作业模式,所述目标空间为所述现实环境中的局部或全部;
5、响应于用户对所述控制界面的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业。
6、在一个实施例中,所述响应于用户对所述运动地图的操作,生成运动指令,包括:
7、响应于用户对所述运动地图中的第一运动区域的操作,显示所述第一局部空间的作业模式设置界面,其中,所述第一运动区域为所述运动地图中任一运动区域,所述第一局部空间为所述第一运动区域对应的局部空间;
8、响应于用户对所述作业模式设置界面的操作,生成运动指令,其中,所述运动指令包括所述第一局部空间的作业模式。
9、在一个实施例中,所述响应于用户对所述运动地图的操作,生成运动指令,包括:
10、响应于用户对所述运动地图中至少一个运动区域的操作,确定所述至少一个运动区域对应的局部空间为目标空间。
11、在一个实施例中,所述响应于用户对所述运动地图中至少一个运动区域的操作,确定所述至少一个运动区域对应的局部空间为目标空间,包括:
12、响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择界面,其中,所述第一运动区域为所述运动地图中任一运动区域,所述目标空间选择界面具有单区选项和多区选项;
13、响应于用户对所述运动区域选择界面内的所述单区选项的操作,确定所述第一局部空间为目标空间,其中,所述第一局部空间为所述第一运动区域对应的局部空间;
14、响应于用户对所述运动区域选择界面内的所述多区选项的操作,以及用户对所述第一运动区域之外的至少一个运动区域的操作,确定所述第一运动区域以及所述至少一个运动区域对应的局部空间为目标空间。
15、在一个实施例中,所述运动指令还包括所述目标空间中的多个局部空间的顺序;
16、所述响应于用户对所述运动地图的操作,生成运动指令,还包括:
17、根据用户对所述第一运动区域之外的至少一个运动区域的操作顺序,确定所述目标空间中的多个局部空间的顺序。
18、在一个实施例中,所述响应于用户对所述运动地图的操作,生成运动指令,包括:
19、响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择框,其中,所述第一运动区域为所述运动地图中任一运动区域;
20、响应于用户对所述目标空间选择框的操作,调整所述目标空间选择框的尺寸和位置,并将所述显示环境中与所述目标空间选择框内的区域对应的空间确定为目标空间。
21、在一个实施例中,还包括:
22、响应于用户对所述第一运动区域的操作,显示指令类型界面,其中,所述指令类型界面满足下述至少一项:所述指令类型界面包括作业模式选项、所述指令类型界面包括选择框选项、所述目标空间选择界面集成于所述指令类型界面;
23、所述响应于用户对所述运动地图中的第一运动区域的操作,显示所述第一局部空间的作业模式设置界面,包括:
24、响应于用户对所述作业模式选项的操作,显示所述第一局部空间的作业模式设置界面;
25、所述响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择框,包括:
26、响应于用户对所述选择框选项的操作,显示所述目标空间选择框。
27、在一个实施例中,在所述响应于用户对所述运动地图的操作,生成运动指令之后,还包括:
28、在所述运动地图中,对所述目标空间对应的区域进行突出显示,和/或在所述运动地图的至少一个运动区域中,对所述运动区域对应的局部空间的作业模式进行显示。
29、在一个实施例中,所述控制界面还包括启动标识;
30、所述响应于用户对所述控制界面的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业,包括:
31、响应于用户对所述启动标识的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业。
32、在一个实施例中,在所述响应于用户对所述运动地图的操作,生成运动指令之前,还包括:
33、响应于用户对所述启动标识的操作,控制所述机器人在所述现实环境的全部空间内运动,并在每个局部空间内以默认作业模式进行作业。
34、根据本公开实施例的第二方面,提供一种交互装置,应用于与机器人预先建立连接的终端设备,所述装置包括:
35、显示模块,用于显示所述机器人的控制界面,其中,所述控制界面包括用于表示具有多个局部空间的现实环境的运动地图,所述运动地图包括多个运动区域,所述多个运动区域与所述多个局部空间一一对应;
36、指令模块,用于响应于用户对所述运动地图的操作,生成运动指令,其中,所述运动指令包括目标空间,和/或至少一个局部空间的作业模式,所述目标空间为所述现实环境中的局部或全部;
37、控制指令,用于响应于用户对所述控制界面的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业。
38、在一个实施例中,所述指令模块具体用于:
39、响应于用户对所述运动地图中的第一运动区域的操作,显示所述第一局部空间的作业模式设置界面,其中,所述第一运动区域为所述运动地图中任一运动区域,所述第一局部空间为所述第一运动区域对应的局部空间;
40、响应于用户对所述作业模式设置界面的操作,生成运动指令,其中,所述运动指令包括所述第一局部空间的作业模式。
41、在一个实施例中,所述指令模块具体用于:
42、响应于用户对所述运动地图中至少一个运动区域的操作,确定所述至少一个运动区域对应的局部空间为目标空间。
43、在一个实施例中,所述指令模块用于响应于用户对所述运动地图中至少一个运动区域的操作,确定所述至少一个运动区域对应的局部空间为目标空间时,具体用于:
44、响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择界面,其中,所述第一运动区域为所述运动地图中任一运动区域,所述目标空间选择界面具有单区选项和多区选项;
45、响应于用户对所述运动区域选择界面内的所述单区选项的操作,确定所述第一局部空间为目标空间,其中,所述第一局部空间为所述第一运动区域对应的局部空间;
46、响应于用户对所述运动区域选择界面内的所述多区选项的操作,以及用户对所述第一运动区域之外的至少一个运动区域的操作,确定所述第一运动区域以及所述至少一个运动区域对应的局部空间为目标空间。
47、在一个实施例中,所述运动指令还包括所述目标空间中的多个局部空间的顺序;
48、所述指令模块还用于:
49、根据用户对所述第一运动区域之外的至少一个运动区域的操作顺序,确定所述目标空间中的多个局部空间的顺序。
50、在一个实施例中,所述指令模块具体用于:
51、响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择框,其中,所述第一运动区域为所述运动地图中任一运动区域;
52、响应于用户对所述目标空间选择框的操作,调整所述目标空间选择框的尺寸和位置,并将所述显示环境中与所述目标空间选择框内的区域对应的空间确定为目标空间。
53、在一个实施例中,所述指令模块还用于:
54、响应于用户对所述第一运动区域的操作,显示指令类型界面,其中,所述指令类型界面满足下述至少一项:所述指令类型界面包括作业模式选项、所述指令类型界面包括选择框选项、所述目标空间选择界面集成于所述指令类型界面;
55、所述指令模块用于响应于用户对所述运动地图中的第一运动区域的操作,显示所述第一局部空间的作业模式设置界面时,具体用于:
56、响应于用户对所述作业模式选项的操作,显示所述第一局部空间的作业模式设置界面;
57、所述指令模块用于响应于用户对所述运动地图中的第一运动区域的操作,显示目标空间选择框时,具体用于:
58、响应于用户对所述选择框选项的操作,显示所述目标空间选择框。
59、在一个实施例中,还包括显示模块,用于:
60、在所述响应于用户对所述运动地图的操作,生成运动指令之后,在所述运动地图中,对所述目标空间对应的区域进行突出显示,和/或在所述运动地图的至少一个运动区域中,对所述运动区域对应的局部空间的作业模式进行显示。
61、在一个实施例中,所述控制界面还包括启动标识;
62、所述控制模块具体用于:
63、响应于用户对所述启动标识的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业。
64、在一个实施例中,还包括默认模块,用于:
65、在所述响应于用户对所述运动地图的操作,生成运动指令之前,响应于用户对所述启动标识的操作,控制所述机器人在所述现实环境的全部空间内运动,并在每个局部空间内以默认作业模式进行作业。
66、根据本公开实施例的第三方面,提供一种电子设备,所述电子设备包括存储器、处理器,所述存储器用于存储可在处理器上运行的计算机指令,所述处理器用于在执行所述计算机指令时实现第一方面所述的交互方法。
67、根据本公开实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现第一方面所述的方法。
68、本公开的实施例提供的技术方案可以包括以下有益效果:
69、本公开实施例所提供的交互方法,通过显示所述机器人的控制界面,可以使用户向控制界面所包括的用于标识具有多个局部空间的现实环境的运动地图输入操作,进而可以响应于用户对运动地图的操作,生成包括目标空间和/或至少一个局部空间的作业模式,最后可以响应于用户对所述控制界面的操作,控制所述机器人在所述目标空间中运动,并在每个局部空间内以对应的作业模式进行作业。也就是说,用户可以直接向控制界面内的运动地图输入操作,从而设置机器人作业的目标空间,以及机器人在每个局部空间内的作业模式,同时用户还可以直接向控制界面输入操作以控制机器人执行上述设置内容,因此本公开所提供的交互界面较为清晰直接,交互逻辑较为简单方便,自动控制逻辑中的各项设置的发现和调取不存在障碍,易于用户的使用,极大的提高了用户的操作便捷度较低,以及使用体验。
- 还没有人留言评论。精彩留言会获得点赞!