煤矿井下机械远程控制方法及系统与流程
本发明涉及自动控制系统,尤其涉及煤矿井下机械远程控制方法及系统。
背景技术:
1、自动控制系统技术领域专注于开发和实施各种自动化策略来管理和控制机械设备,特别是在难以接近或危险的环境中。在煤矿这样的环境下,自动控制技术是至关重要的,因为可以提高安全性,效率,以及操作的精确性。这个领域包括了从基本的机械控制到高度复杂的计算机集成制造系统的广泛技术。利用传感器,执行器,控制算法,以及通信技术来实现对井下机械的有效控制。
2、其中,煤矿井下机械远程控制方法是一种专门为煤矿井下机械设备设计的控制策略,使得操作者能在安全的位置远程控制机械。其目的是为了降低煤矿工人的安全风险,提高作业效率和减少人力成本。通过这种方法,煤矿的生产安全性和效率都可以显著提升,同时,还有助于实现精准的开采,减少资源浪费。这种控制方法通常要达成的效果包括提高作业安全性、提升作业效率、降低人力成本以及提升资源利用率。
3、传统的煤矿井下机械远程控制方法存在一些明显不足。首先,在设备状态监控和信息处理方面,传统方法往往依赖于更简单的算法,这限制了数据处理的效率和准确性。例如,缺乏高级算法如图神经网络,导致信息更新滞后,增加了作业过程中的不确定性和风险。其次,传统路径规划较为静态,缺乏动态优化能力,这导致机械运作效率低下,增加不必要的操作时间和成本。再者,对于异常情况的监测和响应,传统方法通常不具备高效的预测和自动调整能力,这增加了事故发生的风险。最后,传统通信系统在自适应性和稳定性方面表现不佳,这导致远程控制过程中的通信中断或干扰,影响作业安全和效率。这些不足导致了作业效率的降低,安全风险的增加,以及整体控制系统的不稳定。
技术实现思路
1、本发明的目的是解决现有技术中存在的缺点,而提出的煤矿井下机械远程控制方法及系统。
2、为了实现上述目的,本发明采用了如下技术方案:煤矿井下机械远程控制方法,包括以下步骤:
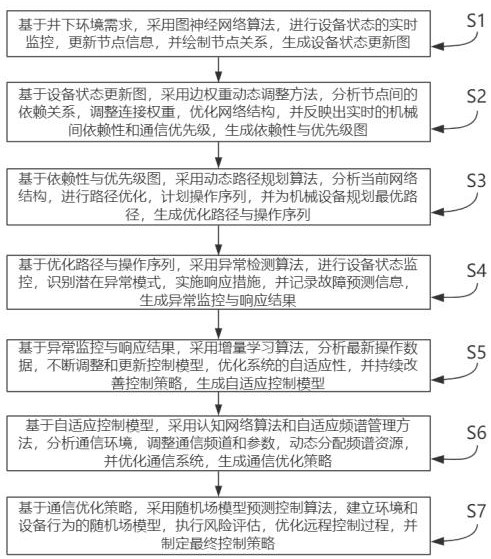
3、s1:基于井下环境需求,采用图神经网络算法,进行设备状态的实时监控,更新节点信息,并绘制节点关系,生成设备状态更新图;
4、s2:基于所述设备状态更新图,采用边权重动态调整方法,分析节点间的依赖关系,调整连接权重,优化网络结构,并反映出实时的机械间依赖性和通信优先级,生成依赖性与优先级图;
5、s3:基于所述依赖性与优先级图,采用动态路径规划算法,分析当前网络结构,进行路径优化,计划操作序列,并为机械设备规划最优路径,生成优化路径与操作序列;
6、s4:基于所述优化路径与操作序列,采用异常检测算法,进行设备状态监控,识别潜在异常模式,实施响应措施,并记录故障预测信息,生成异常监控与响应结果;
7、s5:基于所述异常监控与响应结果,采用增量学习算法,分析最新操作数据,不断调整和更新控制模型,优化系统的自适应性,并持续改善控制策略,生成自适应控制模型;
8、s6:基于所述自适应控制模型,采用认知网络算法和自适应频谱管理方法,分析通信环境,调整通信频道和参数,动态分配频谱资源,并优化通信系统,生成通信优化策略;
9、s7:基于所述通信优化策略,采用随机场模型预测控制算法,建立环境和设备行为的随机场模型,执行风险评估,优化远程控制过程,并制定最终控制策略。
10、作为本发明的进一步方案,所述设备状态更新图包括节点标识、实时位置坐标和运行状态指标,所述依赖性与优先级图包括权重分布图、节点相互作用强度和优先级等级序列,所述优化路径与操作序列包括路径长度、路径耗费资源和预计操作时间,所述异常监控与响应结果包括故障类型、发生频率和紧急响应步骤,所述自适应控制模型包括模型参数、适应性评分和改进历史,所述通信优化策略包括频谱分配表、信道状态信息和通信延迟指标,所述最终控制策略包括决策树、风险评估矩阵和操作规范列表。
11、作为本发明的进一步方案,基于井下环境需求,采用图神经网络算法,进行设备状态的实时监控,更新节点信息,并绘制节点关系,生成设备状态更新图的步骤具体为:
12、s101:基于井下环境需求,进行数据采集,通过传感器网络实时监控设备多项参数,包括温度、压力、位置,从多种传感器收集原始数据,并将数据转换为标准格式,并进行数据初步清洗和标准化处理,生成初始设备状态数据;
13、s102:基于所述初始设备状态数据,采用状态分析算法,通过特征提取技术分析多个设备节点的运行状态和环境数据,识别关键的运行参数和性能指标,并进行关键状态指标提取和节点属性分析,生成节点属性分析结果;
14、s103:基于所述节点属性分析结果,采用图构建算法,通过网络拓扑学和图理论分析设备间的关系,将设备及其相互作用转换为图的节点和边,并进行节点间的连接关系绘制和关键路径标识,生成初步节点连接图;
15、s104:基于所述初步节点连接图,采用图神经网络算法,通过对节点表示学习和边权重更新,循环迭代优化网络结构,加强节点间信息的流动和学习,并进行网络结构优化和权重更新,生成设备状态更新图。
16、作为本发明的进一步方案,基于所述设备状态更新图,采用边权重动态调整方法,分析节点间的依赖关系,调整连接权重,优化网络结构,并反映出实时的机械间依赖性和通信优先级,生成依赖性与优先级图的步骤具体为:
17、s201:基于所述设备状态更新图,采用网络流分析算法,通过计算网络中多节点的度和集聚系数,分析设备间的依赖性,通过定量化网络流量,识别高依赖性节点,并生成节点依赖性数据,具体为包括节点度分布和集聚系数的图论指标;
18、s202:基于所述节点依赖性数据,采用动态加权网络算法,根据节点依赖性调整边的权重,包括计算依赖性分析得出的权重变化,并对网络中每个边的权重进行调整,反映实际的依赖关系,生成权重调整网络数据;
19、s203:基于所述权重调整网络数据,采用网络拓扑优化算法,通过调整节点和边的布局来优化网络结构,包括利用图论和网络科学原理来重新分配节点位置,调整边的连接方式,生成优化网络结构数据;
20、s204:基于所述优化网络结构数据,采用实时动态系统分析技术,监测和更新机械间的依赖性和通信优先级,包括利用最新的网络数据来动态调整每个机械的操作优先级,维持网络运行,生成依赖性与优先级图。
21、作为本发明的进一步方案,基于所述依赖性与优先级图,采用动态路径规划算法,分析当前网络结构,进行路径优化,计划操作序列,并为机械设备规划最优路径,生成优化路径与操作序列的步骤具体为:
22、s301:基于所述依赖性与优先级图,采用图论分析算法,进行网络的结构性分析,包括计算图中节点的连通性,识别网络中的关键节点和路径,评估节点间的依赖强度,并识别网络中的主要和次要路径,生成关键路径识别数据;
23、s302:基于所述关键路径识别数据,采用启发式路径优化算法,进行路径优化,包括利用关键路径数据来指导路径选择,通过比较多路径的长度和成本,根据设备运行的实际情况调整和选择最佳运行路径,生成路径优化方案数据;
24、s303:基于所述路径优化方案数据,采用序列决策算法,规划操作序列,根据优化后的路径为每个机械设备设计操作步骤和顺序,同时对多操作环节的资源占用和时间消耗进行预估,生成细化操作序列数据;
25、s304:基于所述细化操作序列数据,采用动态调整算法,进行路径和操作序列优化,包括根据实时反馈和预测模型动态调整路径选择和操作序列,生成优化路径与操作序列。
26、作为本发明的进一步方案,基于所述优化路径与操作序列,采用异常检测算法,进行设备状态监控,识别潜在异常模式,实施响应措施,并记录故障预测信息,生成异常监控与响应结果的步骤具体为:
27、s401:基于所述优化路径与操作序列,采用时间序列分析算法,进行设备运行数据的实时收集与分析,收集设备的温度、压力、速度运行参数,并对运行参数进行时间序列建模,捕捉变化趋势和周期性特征,生成设备运行时序数据集;
28、s402:基于所述设备运行时序数据集,采用机器学习中的聚类分析算法,进行异常模式的识别,利用历史正常运行数据训练模型,对当前运行数据进行分类,识别出与正常模式差异化的数据集群,生成潜在异常模式数据;
29、s403:基于所述潜在异常模式数据,采用统计学中的预测建模算法,进行故障的预测和诊断,根据识别出的异常模式,分析故障原因和发展趋势,评估故障的概率和潜在影响,生成故障预测与分析数据;
30、s404:基于所述故障预测与分析数据,采用决策树算法,制定响应措施,根据故障的严重性和影响范围,选定措施,包括调整设备参数、重新规划操作序列或紧急停机,生成异常监控与响应结果。
31、作为本发明的进一步方案,基于所述异常监控与响应结果,采用增量学习算法,分析最新操作数据,不断调整和更新控制模型,优化系统的自适应性,并持续改善控制策略,生成自适应控制模型的步骤具体为:
32、s501:基于所述异常监控与响应结果,采用数据整理算法,进行数据的清洗、格式化和编码,包括去除噪声、标准化数值范围、转换非数值数据为数值型,生成整理后的数据集;
33、s502:基于所述整理后的数据集,采用特征工程算法,提取关键数据特征,包括分析多特征与目标变量之间的关系,采用主成分分析或特征选择算法降低特征维度并增强模型的预测能力,生成优化特征集;
34、s503:基于所述优化特征集,采用增量学习算法,对控制模型进行迭代调整和更新,利用新数据训练和调整模型的权重和参数,匹配新的操作环境和数据变化,生成调整后的控制模型;
35、s504:基于所述调整后的控制模型,采用模型优化技术,进行参数调优和性能提升,包括评估和优化模型的多个参数,包括学习率和正则化权重,生成自适应控制模型。
36、作为本发明的进一步方案,基于所述自适应控制模型,采用认知网络算法和自适应频谱管理方法,分析通信环境,调整通信频道和参数,动态分配频谱资源,并优化通信系统,生成通信优化策略的步骤具体为:
37、s601:基于所述自适应控制模型,采用认知无线电网络感知算法,分析当前通信环境,通过频谱扫描和信号质量评估来识别可用频段和干扰源,优化频谱利用效率,生成环境分析综合结果;
38、s602:基于所述环境分析综合结果,采用自适应频谱分配算法,调整通信频道和参数,通过实时监测通信需求和频谱使用情况来动态分配频谱资源,减少频谱冲突,提高频谱使用效率,生成频谱资源配置方案;
39、s603:基于所述频谱资源配置方案,采用多目标优化方法,进行频谱资源动态分配,通过多目标决策算法调整资源分配优先级,实现在多通信节点间的资源分配,平衡系统性能与资源使用,生成动态资源分配表;
40、s604:基于所述动态资源分配表,采用系统性能优化模型,优化通信系统,通过性能分析和配置调整提升系统稳定性与效率,降低系统延迟和资源浪费,生成通信优化策略。
41、作为本发明的进一步方案,基于所述通信优化策略,采用随机场模型预测控制算法,建立环境和设备行为的随机场模型,执行风险评估,优化远程控制过程,并制定最终控制策略的步骤具体为:
42、s701:基于所述通信优化策略,采用高斯马尔可夫随机场模型,执行环境和设备行为预测,通过分析时间序列数据和空间关联性,识别系统行为模式,对未来环境变化进行预测,并建立环境行为预测模型;
43、s702:基于所述环境行为预测模型,执行贝叶斯网络风险评估,通过构建环境变量和系统行为之间的概率关系,评估风险点,执行针对系统稳定性和性能的量化分析,生成定量风险评估结果;
44、s703:基于所述定量风险评估结果,采用模糊逻辑控制优化方法,分析结果中的风险要素,对远程控制流程中的关键参数进行调整,通过调整反馈逻辑和控制规则,匹配预测的环境变化和潜在风险,生成控制流程调整方案;
45、s704:基于所述控制流程调整方案,整合多源信息,采用系统性能优化算法,聚焦于提高系统整体响应速度和处理能力,通过分析多数据源的输入,调整系统配置匹配操作环境,生成最终控制策略。
46、煤矿井下机械远程控制系统,所述煤矿井下机械远程控制系统用于执行上述煤矿井下机械远程控制方法,所述系统包括环境感知模块、网络结构优化模块、路径规划与序列决策模块、异常监控与响应模块、自适应控制模型优化模块、通信与控制策略集成模块;
47、所述环境感知模块基于井下环境需求,采用图神经网络算法,对设备状态进行实时监控,实时更新节点信息,绘制节点间的相互关系,进行环境内设备状态的映射,生成实时环境感知图;
48、所述网络结构优化模块基于实时环境感知图,应用边权重动态调整方法,分析设备间的依赖关系,实时调整节点间的连接权重,优化整体网络结构,反映机械间的依赖性和通信优先级,生成优化依赖性网络图;
49、所述路径规划与序列决策模块基于优化依赖性网络图,运用动态路径规划算法,对当前网络结构进行分析,优化操作路径,规划机械设备的操作序列,生成细化操作序列;
50、所述异常监控与响应模块基于细化操作序列,采用异常检测算法,监控设备运行状态,识别潜在异常模式,并根据潜在异常模式实施响应措施,保障系统的稳定运行,生成异常状态反馈;
51、所述自适应控制模型优化模块基于异常状态反馈,运用增量学习算法,分析最新的操作数据,根据操作数据不断调整和更新控制模型,生成优化控制策略模型;
52、所述通信与控制策略集成模块基于优化控制策略模型,采用认知网络算法和自适应频谱管理方法,分析通信环境,根据环境变化动态调整通信频道和参数,最大化频谱资源的使用效率和通信系统的性能,生成综合通信控制策略。
53、与现有技术相比,本发明的优点和积极效果在于:
54、本发明中,通过图神经网络算法的应用实现了设备状态的实时监控和更新,大大提高了信息处理的准确性和速度。动态路径规划算法优化了机械设备的操作路径,减少了冗余动作,提高了工作效率。异常检测算法的使用增强了系统对潜在问题的预测和响应能力,降低了事故发生的风险。同时,自适应控制模型和认知网络算法的结合,为通信系统带来了更高的稳定性和自适应性,确保了远程控制的连续性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!