一种异构无人集群协同路径规划与避障方法
本发明涉及无人集群智能协同,具体涉及一种异构无人集群协同路径规划与避障方法。
背景技术:
1、无人集群关键技术包括通信组网技术、智能协同技术、效能评估技术、能源动力技术等,其中路径规划是无人集群智能协同技术的重要组成部分,是无人集群安全、高效执行任务的前提,奠定了无人集群执行任务的能力基础。路径规划根据无人集群系统的地理位置、威胁障碍、能源消耗等因素,为集群中每个个体计算一条可执行路径,并保证多条路径之间的协同性、安全性等指标。
2、无人集群路径规划方法主要包括基于力的方法、基于速度的方法、基于优化的方法和基于学习的方法等。基于力的方法典型代表是人工势场法,基本思路是通过人工力,集群个体被目标位置吸引,并被障碍物和其他集群个体排斥,以避免碰撞。人工势场法实现简单、计算量小但是容易陷入局部最优。基于速度的方法利用几何特性分析碰撞的可能性,具有预见性,需要利用避碰双方的速度、位置信息,典型代表是最优互补避碰方法。最优互补避碰方法在大规模集群路径规划中成为流行的选择,但是要求位置和速度信息的准确获取,仅具备局部感知能力的无人集群不易满足。基于优化的方法从一组微分方程中寻找控制的状态和路径,最为典型的代表是模型预测控制,其主要思想是通过对系统行为的预测来寻找未来必须执行的最优控制方法,适合变化的环境,但是该方法通常是计算密集型的,特别在大规模群集导航的情况下。基于学习的方法典型代表是强化学习,通过优化智能体的行为相对于环境提供的奖励函数,实现无人集群的自主路径规划与避障,但是训练具有盲目性,算法收敛性不能保证。
3、综上,现有技术存在集群规模较大时适用性较差、集群规划路径的计算效率低、集群协同避障的效果差以及给无人集群和环境造成安全隐患的问题。
技术实现思路
1、鉴于上述问题,本发明提供了一种异构无人集群协同路径规划与避障方法,解决了现有技术中集群规模较大时适用性较差、集群规划路径的计算效率低、集群协同避障的效果差以及给无人集群和环境造成安全隐患的问题。
2、本发明提供了一种异构无人集群协同路径规划与避障方法,包括如下步骤:
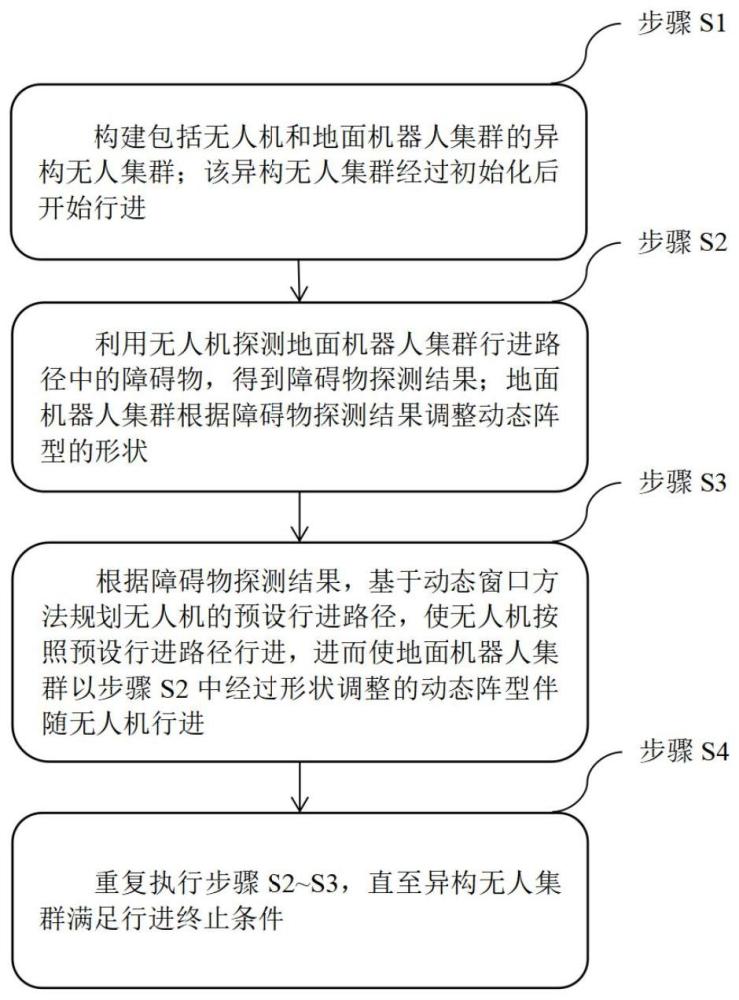
3、步骤s1.构建包括无人机和地面机器人集群的异构无人集群;该异构无人集群经过初始化后开始行进;
4、步骤s2.利用无人机探测地面机器人集群行进路径中的障碍物,得到障碍物探测结果;地面机器人集群根据障碍物探测结果调整动态阵型的形状;
5、步骤s3.根据障碍物探测结果,基于动态窗口方法规划无人机的预设行进路径,使无人机按照预设行进路径行进,进而使地面机器人集群以步骤s2中经过形状调整的动态阵型伴随无人机行进;
6、步骤s4.重复执行步骤s2~s3,直至异构无人集群满足行进终止条件。
7、进一步地,步骤s1中的所述异构无人集群的初始化包括:
8、设置由无人机维护的动态虚拟区域以及该动态虚拟区域的初始值;
9、地面机器人集群根据初始动态虚拟区域调整至初始动态阵型。
10、进一步地,动态虚拟区域包括动态虚拟区域的中心位置,在地面坐标系的地面平面内,该动态虚拟区域的中心位置的坐标与无人机的位置的坐标重合。
11、进一步地,在步骤s1~s4中,动态虚拟区域用于使地面机器人集群按照基于人工势场法和一致性原理的控制算法进行协调运动,调整地面机器人集群的动态阵型的形状和中心位置的坐标,使动态阵型的形状和动态虚拟区域的形状一致,使动态阵型的中心位置的坐标和动态虚拟区域的中心位置的坐标一致。
12、进一步地,步骤s2具体包括:
13、步骤s2-1.利用无人机探测地面机器人集群行进路径中的障碍物,得到障碍物探测结果;
14、步骤s2-2.根据障碍物探测结果计算得到地面机器人集群的可通行区域宽度参数,包括可通行间隙的宽度、可通行间隙的数量和障碍物最短间距;
15、步骤s2-3.根据可通行区域宽度参数得到可通行区域宽度;
16、步骤s2-4.根据可通行区域宽度更新初始动态虚拟区域的形状;
17、步骤s2-5.根据更新后的动态虚拟区域的形状,更新地面机器人集群的动态阵型的形状。
18、进一步地,步骤s3具体包括:
19、步骤s3-1.根据障碍物探测结果计算得到无人机的控制输入容许空间;
20、步骤s3-2.在无人机的控制输入容许空间内,规划无人机的预设行进路径,并得到最优控制输入;
21、步骤s3-3.利用最优控制输入使无人机按照预设行进路径行进,进而调整更新后的动态虚拟区域的中心坐标来平移更新后的动态虚拟区域;
22、步骤s3-4.根据更新后的动态虚拟区域的中心坐标调整地面机器人集群的动态阵型的中心坐标,使得地面机器人集群在行进中保持更新后的动态阵型的形状的同时,通过平移来规避环境中的障碍物。
23、进一步地,步骤s2-3具体指比较可通行间隙的宽度和障碍物最短间距,将比较结果中的最小值作为可通行区域宽度。
24、进一步地,步骤s2-4具体包括:比较可通行区域宽度与当前动态阵型的形状的宽度,如果当前动态阵型的形状的宽度大于可通行区域宽度,则基于可通行区域宽度对动态虚拟区域形状的进行更新;如果当前动态阵型的形状的宽度小于可通行区域宽度,则保持当前动态虚拟区域的形状。
25、进一步地,步骤s3-1具体包括:
26、步骤s3-1-1.构建无人机的控制输入可达空间;
27、步骤s3-1-2.根据障碍物探测结果,获得更新后的动态虚拟区域与障碍物发生碰撞所对应的无人机的控制输入限制空间;
28、步骤s3-1-3.计算无人机的控制输入限制空间的补集,得到无人机的控制输入非限制空间;再计算无人机的控制输入非限制空间与无人机的控制输入可达空间的交集,得到无人机的控制输入容许空间。
29、进一步地,步骤s4中的所述行进终止条件具体指无人机到达目标终点的预设邻域内或行进时间超过预设值。
30、与现有技术相比,本发明至少具有现如下有益效果:
31、(1)本发明的异构无人集群协同路径规划与避障方法,通过无人机规划动态虚拟区域的形状和路径对异构无人集群的运动进行协调,发挥无人机在探测能力方面的优势,通过提前规划调整,提升整个异构无人集群在复杂障碍物环境下协同导航避障的效率,集群规划路径的计算效率高,避障效果好。
32、(2)本发明的异构无人集群协同路径规划与避障方法,通过对异构无人集群的无碰撞路径协同规划进行拆解,转化为无人机对动态虚拟区域形状和路径的规划以及地面机器人在动态虚拟区域下的自组织协调运动,避免为所有无人平台规划路径,提升了计算效率,具有一定的规模扩展性和灵活性,能够应用于大规模集群,适用性较强。
33、(3)本发明的异构无人集群协同路径规划与避障方法,具备良好的集群规划路径的计算效率和避障效果,可靠性强,提升无人集群和环境的安全水平。
技术特征:
1.一种异构无人集群协同路径规划与避障方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s1中的所述异构无人集群的初始化包括:
3.根据权利要求2所述的异构无人集群协同路径规划与避障方法,其特征在于,所述动态虚拟区域包括动态虚拟区域的中心位置,在地面坐标系的地面平面内,该动态虚拟区域的中心位置的坐标与无人机的位置的坐标重合。
4.根据权利要求3所述的异构无人集群协同路径规划与避障方法,其特征在于,在步骤s1~s4中,动态虚拟区域用于使地面机器人集群按照基于人工势场法和一致性原理的控制算法进行协调运动,调整地面机器人集群的动态阵型的形状和中心位置的坐标,使动态阵型的形状和动态虚拟区域的形状一致,使动态阵型的中心位置的坐标和动态虚拟区域的中心位置的坐标一致。
5.根据权利要求4所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s2具体包括:
6.根据权利要求5所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s3具体包括:
7.根据权利要求6所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s2-3具体指比较可通行间隙的宽度和障碍物最短间距,将比较结果中的最小值作为可通行区域宽度。
8.根据权利要求7所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s2-4具体包括:比较可通行区域宽度与当前动态阵型的形状的宽度,如果当前动态阵型的形状的宽度大于可通行区域宽度,则基于可通行区域宽度对动态虚拟区域形状的进行更新;如果当前动态阵型的形状的宽度小于可通行区域宽度,则保持当前动态虚拟区域的形状。
9.根据权利要求8所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s3-1具体包括:
10.根据权利要求9所述的异构无人集群协同路径规划与避障方法,其特征在于,步骤s4中的所述行进终止条件具体指无人机到达目标终点的预设邻域内或行进时间超过预设值。
技术总结
本发明涉及一种异构无人集群协同路径规划与避障方法,属于无人集群智能协同技术领域,解决了现有技术中集群规模较大时适用性较差、集群规划路径的计算效率低、集群协同避障的效果差以及给无人集群和环境造成安全隐患的问题。本发明通过无人机规划动态虚拟区域的形状和路径对异构无人集群的运动进行协调,发挥无人机在探测能力方面的优势,通过提前规划调整,提升整个异构无人集群在复杂障碍物环境下协同导航避障的效率,集群规划路径的计算效率高,避障效果好;能够应用于大规模集群,适用性较强;本发明方法具备良好的集群规划路径的计算效率和避障效果,可靠性强,提升无人集群和环境的安全水平。
技术研发人员:赵江,张璇,池沛,王英勋
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!