汽车能耗最优的路径规划方法、装置、设备及存储介质与流程
本发明涉及路径规划,尤其涉及一种汽车能耗最优的路径规划方法、装置、设备及存储介质。
背景技术:
1、在真实驾驶环境中,汽车需要克服空气阻力、滚动阻力以及传动阻力等,而其中的空气阻力主要受环境因素的影响较大,比如环境风、湍流度、车速以及车距等。但是现有基于能耗评估的路径规划方法大多都忽略了环境因素的影响,这会导致车辆能耗最优的路径规划结果不佳。
技术实现思路
1、本发明的主要目的在于提供一种汽车能耗最优的路径规划方法、装置、设备及存储介质,旨在解决现有技术中因基于能耗评估的路径规划方法忽略了环境因素的影响而导致路径规划结果不佳的技术问题。
2、为实现上述目的,本发明提供了一种汽车能耗最优的路径规划方法,所述方法包括以下步骤:
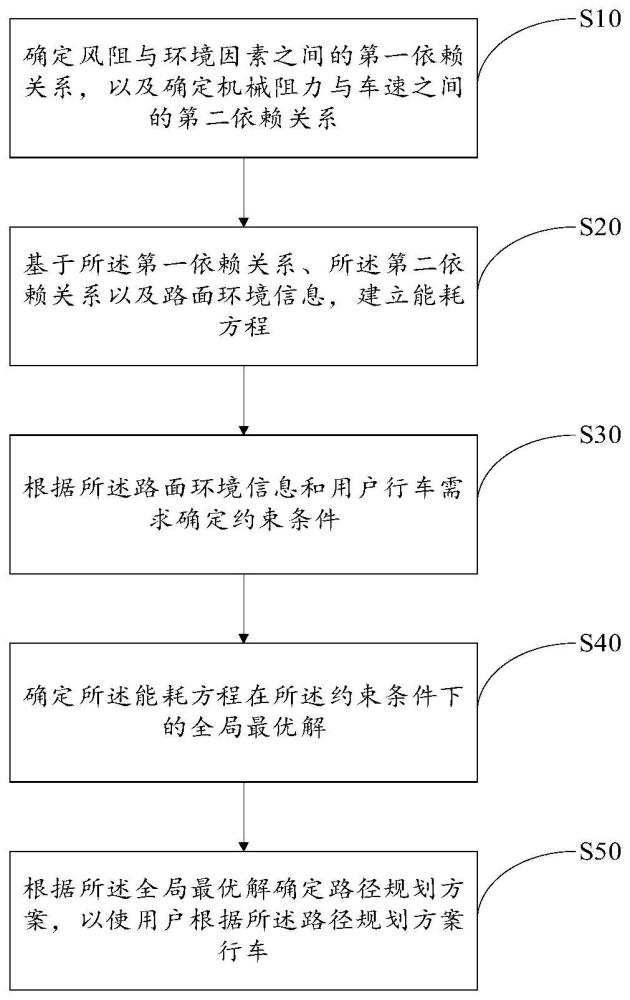
3、确定风阻与环境因素之间的第一依赖关系,以及确定机械阻力与车速之间的第二依赖关系;
4、基于所述第一依赖关系、所述第二依赖关系以及路面环境信息,建立能耗方程;
5、根据所述路面环境信息和用户行车需求确定约束条件;
6、确定所述能耗方程在所述约束条件下的全局最优解;
7、根据所述全局最优解确定路径规划方案,以使用户根据所述路径规划方案行车。
8、可选地,所述环境因素包括环境风、偏航角度、湍流强度以及车距;其中,
9、所述确定风阻与环境因素之间的第一依赖关系,包括:
10、通过云扫描仪对车辆的前端轮廓进行三维扫描后,获取所述前端轮廓的轮廓点云;
11、对所述轮廓点云进行处理,得到所述车辆的迎风面积;
12、根据所述环境风、偏航角度、湍流强度以及车距确定风阻系数值;
13、基于所述迎风面积以及所述风阻系数值确定所述第一依赖关系。
14、可选地,所述根据所述环境风、偏航角度、湍流强度以及车距确定风阻系数值,包括:
15、通过风洞实验以及仿真构建风阻系数与环境因素之间的映射关系表;
16、根据所述环境风、偏航角度、湍流强度以及车距从所述映射关系表中确定风阻系数值。
17、可选地,所述约束条件包括时间约束;其中,
18、所述根据所述路面环境信息和用户行车需求确定约束条件,包括:
19、根据所述路面环境信息将交通路段进行节点划分,确定所述交通路段的路段节点;
20、根据所述路段节点确定所述交通路段的行程总路段,以及确定各路段节点的离开节点路段集合和进入节点路段集合;
21、根据所述行程总路段、所述离开节点路段集合、所述进入节点路段集合以及所述用户行车需求确定所述时间约束。
22、可选地,所述约束条件包括车速约束;其中,
23、所述根据所述路面环境信息和用户行车需求确定约束条件,包括:
24、根据所述路面环境信息将交通路段进行节点划分,确定所述交通路段的路段节点;
25、根据所述路段节点确定所述交通路段的行程总路段;
26、根据所述行程总路段确定各路段的路段长度、最大限制速度、最小限制速度、平均坡度、平均偏航角、湍流强度、平均车距信息、平均相对速度以及平均环境风速;
27、基于所述用户行车需求、所述路段长度、最大限制速度、最小限制速度、平均坡度、平均偏航角、湍流强度、平均车距信息、平均相对速度以及平均环境风速,确定所述车速约束。
28、可选地,所述确定所述能耗方程在所述约束条件下的全局最优解,包括:
29、对所述能耗方程以及所述约束条件进行线性化转化,得到线性规划问题;
30、采用分支定界法求解所述线性规划问题,得到所述全局最优解。
31、可选地,所述采用分支定界法求解所述线性规划问题,得到所述全局最优解,包括:
32、将所述线性规划问题的整数变量松弛化为连续变量之后,求解松弛后的线性规划问题得到目标解,将所述目标解作为下界;
33、根据所述整数变量的取值设置分支问题,并基于所述分支问题的解确定上界;
34、在所述上界与下界的偏差小于预设值时,将当前时刻下的最优可行解作为所述全局最优解。
35、此外,为实现上述目的,本发明还提出一种汽车能耗最优的路径规划装置,所述汽车能耗最优的路径规划装置包括:
36、确定模块,用于确定风阻与环境因素之间的第一依赖关系,以及确定机械阻力与车速之间的第二依赖关系;
37、建立模块,用于基于所述第一依赖关系、所述第二依赖关系以及路面环境信息,建立能耗方程;
38、所述确定模块,还用于根据所述路面环境信息和用户行车需求确定约束条件;
39、所述确定模块,还用于确定所述能耗方程在所述约束条件下的全局最优解;
40、所述确定模块,还用于根据所述全局最优解确定路径规划方案,以使用户根据所述路径规划方案行车。
41、此外,为实现上述目的,本发明还提出一种汽车能耗最优的路径规划设备,所述汽车能耗最优的路径规划设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的汽车能耗最优的路径规划程序,所述汽车能耗最优的路径规划程序配置为实现如上文所述的汽车能耗最优的路径规划方法的步骤。
42、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有汽车能耗最优的路径规划程序,所述汽车能耗最优的路径规划程序被处理器执行时实现如上文所述的汽车能耗最优的路径规划方法的步骤。
43、本发明提出的汽车能耗最优的路径规划方法、装置、设备及存储介质,通过确定风阻与环境因素之间的第一依赖关系,以及确定机械阻力与车速之间的第二依赖关系;基于所述第一依赖关系、所述第二依赖关系以及路面环境信息,建立能耗方程;根据所述路面环境信息和用户行车需求确定约束条件;确定所述能耗方程在所述约束条件下的全局最优解;根据所述全局最优解确定路径规划方案,以使用户根据所述路径规划方案行车。通过上述方式,能够在基于能耗评估进行路径规划时考虑环境因素的影响,进而使得基于能耗评估的路径规划结果更优。
技术特征:
1.一种汽车能耗最优的路径规划方法,其特征在于,所述汽车能耗最优的路径规划方法,包括:
2.如权利要求1所述的方法,其特征在于,所述环境因素包括环境风、偏航角度、湍流强度以及车距;其中,
3.如权利要求2所述的方法,其特征在于,所述根据所述环境风、偏航角度、湍流强度以及车距确定风阻系数值,包括:
4.如权利要求1所述的方法,其特征在于,所述约束条件包括时间约束;其中,
5.如权利要求1所述的方法,其特征在于,所述约束条件包括车速约束;其中,
6.如权利要求1所述的方法,其特征在于,所述确定所述能耗方程在所述约束条件下的全局最优解,包括:
7.如权利要求6所述的方法,其特征在于,所述采用分支定界法求解所述线性规划问题,得到所述全局最优解,包括:
8.一种汽车能耗最优的路径规划装置,其特征在于,所述汽车能耗最优的路径规划装置,包括:
9.一种汽车能耗最优的路径规划设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的汽车能耗最优的路径规划程序,所述汽车能耗最优的路径规划程序配置为实现如权利要求1至7中任一项所述的汽车能耗最优的路径规划方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有汽车能耗最优的路径规划程序,所述汽车能耗最优的路径规划程序被处理器执行时实现如权利要求1至7任一项所述的汽车能耗最优的路径规划方法的步骤。
技术总结
本发明属于路径规划技术领域,公开了一种汽车能耗最优的路径规划方法、装置、设备及存储介质。该方法包括:确定风阻与环境因素之间的第一依赖关系,以及确定机械阻力与车速之间的第二依赖关系;基于所述第一依赖关系、所述第二依赖关系以及路面环境信息,建立能耗方程;根据所述路面环境信息和用户行车需求确定约束条件;确定所述能耗方程在所述约束条件下的全局最优解;根据所述全局最优解确定路径规划方案,以使用户根据所述路径规划方案行车。能够在基于能耗评估的路径规划方式下考虑环境因素所带来的影响,进而使得最终得到路径规划方案更佳。
技术研发人员:梁盛平,刘开贺,李洋,马德慧,楚中华
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!