一种物流机器人环境感知与避障方法及系统与流程
本发明一般地涉及物流机器人领域。更具体地,本发明涉及一种物流机器人环境感知与避障方法及系统。
背景技术:
1、近年来,随着人工智能技术的快速发展,越来越多的领域应用的人工智能技术。随着电子商务的发展和物流需求的增加,物流机器人被广泛应用于仓储和物流领域,物流机器人在仓库和物流场景中与人员、设备和其他障碍物频繁交互,通常需要在复杂的环境中自主导航和执行任务,而不依赖外部控制。为了确保在复杂的环境中安全地移动和执行任务,机器人需要能够及时感知周围环境的变化,并避免与障碍物发生碰撞,减少意外事故的发生,因此,它们需要具备良好的环境感知和避障能力,能够根据感知到的信息做出决策和调整行动,以适应不同的工作场景和任务需求。
2、现有技术中物流机器人系统往往采用传感器技术和导航算法,但在复杂环境下,仍然存在一些问题。传统的环境感知与避障方法可能无法适应动态变化的场景,导致机器人在实际操作中效果不佳。
技术实现思路
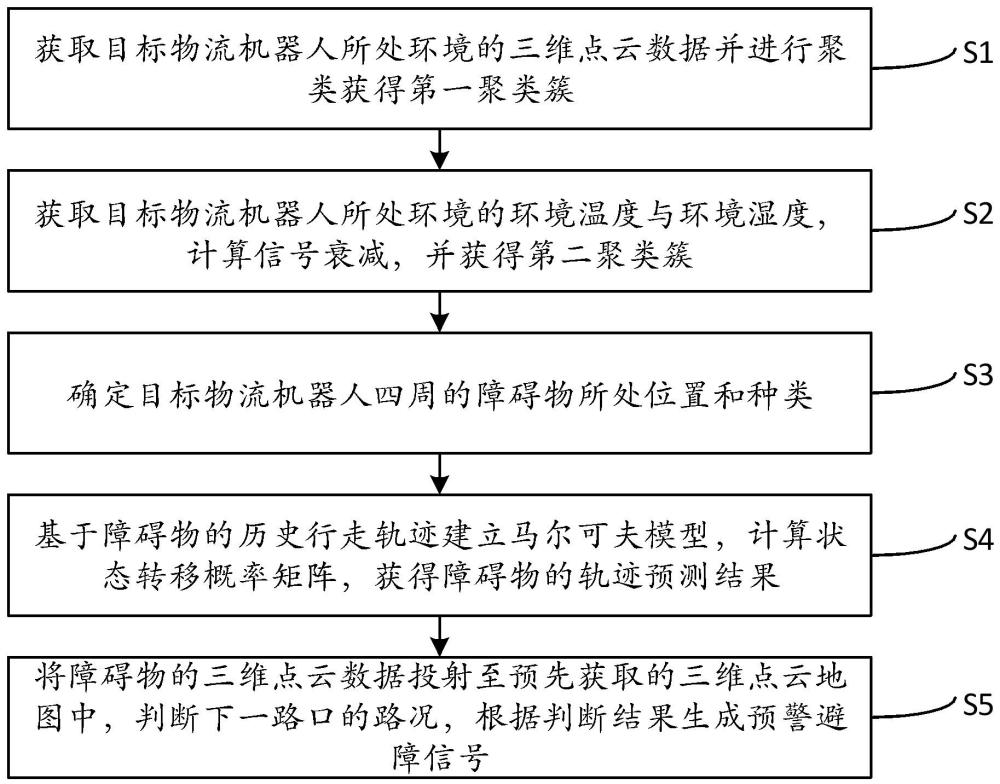
1、为解决上述一个或多个技术问题,本发明提出获取目标物流机器人所处环境的三维点云数据并进行聚类获得第一聚类簇;获取目标物流机器人所处环境的环境温度与环境湿度,计算信号衰减,并获得第二聚类簇;确定目标物流机器人四周的障碍物所处位置和种类;基于障碍物的历史行走轨迹建立马尔可夫模型,计算状态转移概率矩阵,获得障碍物的轨迹预测结果;将障碍物的三维点云数据投射至预先获取的三维点云地图中,判断下一路口的路况,根据判断结果生成预警避障信号。为此,本发明在如下的多个方面中提供方案。
2、一种物流机器人环境感知与避障方法,包括以下步骤:获取目标物流机器人所处环境的三维点云数据;基于信号强度的差异对所述三维点云数据进行第一次聚类,获得第一聚类簇;获取所述目标物流机器人所处环境的环境温度与环境湿度;计算信号衰减,所述信号衰减满足关系式:
3、
4、其中,表示第一聚类簇中所有三维点云数据的平均距离,表示第一聚类簇中所有三维点云数据的平均距离,表示第一聚类簇中所有三维点云数据的平均信号强度,表示第一聚类簇中所有三维点云数据的平均信号强度,表示衰减系数,表示第一聚类簇的环境温度值,表示第一聚类簇的环境温度值,表示第一聚类簇的环境湿度值,表示第一聚类簇的环境湿度值。
5、基于所述信号衰减对所述第一聚类簇进行合并,获得第二聚类簇;分别对每个所述第二聚类簇对应的障碍物设定标签,输入预设的数据集分类模型,确定所述目标物流机器人四周的障碍物所处位置和种类;基于所述障碍物的历史行走轨迹建立马尔可夫模型,计算状态转移概率矩阵,获得所述障碍物的轨迹预测结果;将所述障碍物的三维点云数据投射至预先获取的三维点云地图中,基于所述障碍物的轨迹预测结果判断所述目标物流机器人在行驶路径中下一路口的路况,根据判断结果生成预警避障信号。
6、在一个实施例中,所述获得第一聚类簇包括步骤:随机选取一个目标三维点云数据,计算以所述目标三维点云数据为圆心,预设长度为半径的圆形范围内的三维点云数据与目标三维点云数据之间信号强度的差异,所述差异小于预设阈值时,将这些三维点云数据聚为一个聚类簇,所述信号强度的差异满足表达式:
7、
8、其中,表示信号强度的差异,表示三维点云数据的信号强度值,表示三维点云数据的信号强度值。
9、计算所有三维点云数据和所述目标三维点云数据间的信号强度的差异,直至目标三维点云数据所在的聚类簇不再有新的三维点云数据进入,目标聚类簇聚类完毕;遍历所有三维点云数据,直到所有的三维点云数据均存在于对应的聚类簇中;聚类簇内小于预设值的三维点云数据记为噪声数,排除噪声数据,获得第一聚类簇。
10、在一个实施例中,获取所述目标物流机器人所处环境的环境温度与环境湿度包括:根据不同第一聚类簇的温度传感器的距离计算环境温度,所述环境温度满足关系式:
11、
12、其中,表示第一聚类簇的环境温度值,表示第一聚类簇所处位置的8邻域的第个温度传感器的值。
13、根据不同第一聚类簇的湿度传感器的距离计算环境湿度,所述环境湿度满足关系式:
14、
15、其中,表示第一聚类簇的环境湿度值,表示第一聚类簇所处位置的8邻域的第个湿度传感器的值。
16、在一个实施例中,状态转移概率矩阵满足关系式:
17、
18、其中,表示状态转移概率矩阵中状态转移到状态的概率值,表示障碍物历史行走轨迹中在每个路口从状态转移到状态的次数,表示障碍物历史行走轨迹中状态转移的总次数。
19、在一个实施例中,基于所述障碍物的轨迹预测结果判断所述目标物流机器人在行驶路径中下一路口的路况中,判断方法满足关系式:
20、
21、其中,表示目标物流机器人当前位置到行驶路径中下一路口间的距离,表示目标物流机器人的行驶速度,表示目标障碍物的当前位置到目标物流机器人行驶路径中下一路口的距离,表示目标障碍物的行驶速度。
22、在一个实施例中,还包括:若等式成立,目标障碍物行驶至目标物流机器人行驶路径中下一路口会与目标物流机器人碰撞,比较目标障碍物的状态转移概率矩阵与预设阈值:响应于所述障碍物的状态转移概率矩阵大于预设阈值,目标物流机器人需进行避障准备;响应于所述障碍物的状态转移概率矩阵小于预设阈值,目标物流机器人能够安全通过路口。
23、本发明具有以下技术效果:
24、通过实时更新的三维点云地图,计算每个行动障碍物的状态转移概率判断经过目标物流机器人行驶路径下一路口的概率,从而确定目标物流机器人行驶路径下一路口的路况,使目标物流机器人提前做出避障准备,降低物流机器人在行驶过程中发生碰撞的概率,使物流机器人更加高效安全的行驶。
技术特征:
1.一种物流机器人环境感知与避障方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种物流机器人环境感知与避障方法,其特征在于,所述获得第一聚类簇包括步骤:
3.根据权利要求1所述的一种物流机器人环境感知与避障方法,其特征在于,获取所述目标物流机器人所处环境的环境温度与环境湿度包括:
4.根据权利要求1所述的一种物流机器人环境感知与避障方法,其特征在于,状态转移概率矩阵满足关系式:
5.根据权利要求1所述的一种物流机器人环境感知与避障方法,其特征在于,基于所述障碍物的轨迹预测结果判断所述目标物流机器人在行驶路径中下一路口的路况中,判断方法满足关系式:
6.根据权利要求5所述的一种物流机器人环境感知与避障方法,其特征在于,还包括:
7.一种物流机器人环境感知与避障系统,其特征在于,包括:
技术总结
本发明涉及物流机器人领域,更具体地,本发明涉及一种物流机器人环境感知与避障方法及系统。所述方法包括:获取目标物流机器人所处环境的三维点云数据并进行聚类获得第一聚类簇;获取目标物流机器人所处环境的环境温度与环境湿度,计算信号衰减,并获得第二聚类簇;确定目标物流机器人四周的障碍物所处位置和种类;基于障碍物的历史行走轨迹建立马尔可夫模型,计算状态转移概率矩阵,获得障碍物的轨迹预测结果;将障碍物的三维点云数据投射至预先获取的三维点云地图中,判断下一路口的路况,根据判断结果生成预警避障信号。通过本发明的技术方案,能够使物流机器人根据环境因素实时判断行驶路况,及时且准确的进行避障。
技术研发人员:岳云玲
受保护的技术使用者:湖北迈睿达供应链股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!