基于参考信号发生器的非线性多智能体系统输出反馈一致性控制方法
本发明涉及一种基于参考信号发生器的非线性多智能体系统输出反馈一致性控制方法。
背景技术:
1、科学家对自然界中呈编队迁徙的鸟群、萤火虫同步闪光以及蚂蚁筑巢等现象研究时发现这类群体由大量结构简单的个体组成,群体中每个个体的能力相当有限,但却能通过个体相互之间局部或区域式的交流与合作,使整体能够呈现出规则有序的智能行为和协同行动,如保持队形、逃避天敌、协作攻击和寻找食物等。控制领域的学者基于此类现象设计构造多智能体系统,以进一步完成复杂的任务。
2、在工程实践中,根据性能要求和任务种类等因素,针对个体设计控制规则,使所有个体依照规则相互协调,相互影响,最终使所有个体某个物理量达到相同,这个物理量可以是飞行器追踪的目标、编队控制中的队形或者集会问题中的目的地等,这类问题被称为一致性问题,指系统中的所有个体都能随时间的推移最终趋于一个共同的状态。
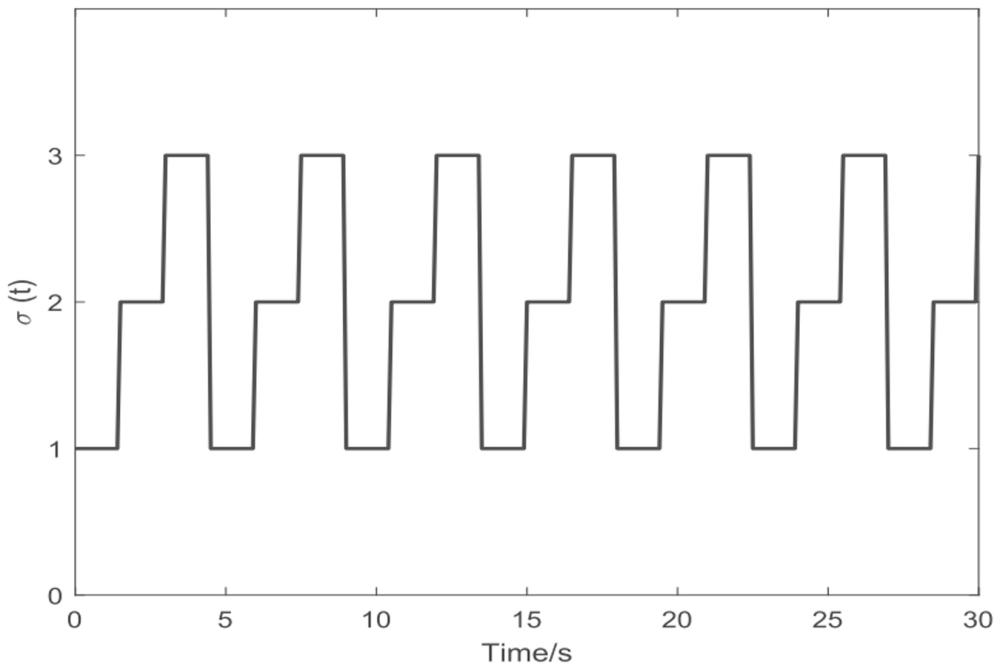
3、一致性问题是多智能体系统研究中的基本问题,在许多科学和工程问题中有着非常重要的应用,例如耦合振子的同步问题、蜂拥问题、最优合作控制、群集问题等等。然而在实际应用中存在外部干扰或通信范围受限等情况,这会导致部分智能体间的通信拓扑结构改变。因此,研究基于切换拓扑下的多智能体一致性问题具有非常重要理论和应用价值。
技术实现思路
1、本发明目的是为了实现有向切换拓扑下具有未知参数的高阶非线性多智能体系统一致性,提供了一种有向切换拓扑下针对一类具有未知参数的高阶非线性多智能体系统一致性控制方法。
2、本发明采用如下技术方案:
3、一种基于参考信号发生器的非线性多智能体系统输出反馈一致性控制方法,在有向切换拓扑下,为每个跟随者设计一个用于逼近领导者轨迹的分布式参考信号发生器;设计降阶动态增益卡尔曼滤波器来重构跟随者的不可测状态变量;利用反步法、动态表面技术,设计控制器,从而实现多智能体系统的输出一致性。
4、所述方法中,领导者的轨迹y0(t)由q个基函数构成,其形式如下:
5、
6、其中,是基函数,对于所有智能体只有可用,常数和只能被与领导者直接接触的智能体可用;
7、第i个跟随者的结构如下:
8、
9、其中,xi、ui和yi分别为系统的状态、控制输入和输出,fi,j,s是已知光滑函数,φij是已知光滑函数矩阵,和θi是未知常数向量。
10、所述方法中,为每个跟随者设计分布式参考信号发生器逼近领导者的轨迹,第i个跟随者的参考信号发生器结构为:
11、
12、其中,是用于估领导者轨迹y0(t)的参考信号发生器的输出,是第i个跟随者对的估计,hiσ(t)是hσ(t)的第i行,his(t)=-ais(t),
13、所述方法中,所设计的参考信号发生器的输出可以指数地跟踪期望轨迹y0(t),可以指数地估计
14、所述方法中,为每个子系统设计的降阶动态增益卡尔曼滤波器结构为:
15、
16、其中,k=(0,…,mi),
17、
18、设计动态增益:
19、
20、其中,κi≤[1/(2σi2)],φi≥[(2||pi||φi1)/σi1],ρ、δi14、bt、和是正的常数,且0<bt<<1。
21、所述方法中,对称正定矩阵pi和正常数σi1、σi2、ai满足:
22、
23、其中,qi为常数向量,di=diag{0,1,…,ni-2},
24、
25、所述方法中,由于li≥1,存在非负光滑函数φi1满足
26、所述方法中,所述利用反步法、动态表面技术,设计控制器设计过程如下:
27、反步法第1步:定义坐标变换滤波误差跟踪误差
28、反步法第2~(ρi-1)步:定义坐标变换为滤波误差
29、反步法第ρi步:定义坐标变换为
30、具体的,反步法第1步中,设计虚拟滤波控制器:
31、
32、
33、其中,∈i1、ci1、δi11、δi12是正常数,分别是χi、λi、βi的估计值,βi=sup||θi||,
34、自适应律设计为:
35、
36、
37、
38、其中,为正的常数;
39、具体的,反步法第2~(ρi-1)步中,虚拟控制器设计为:
40、
41、其中cij、δij1、δij2、δi(j-1)1为正常数;
42、具体的,反步法第ρi步中,控制器设计为:
43、
44、其中,为正的常数。
45、本发明的有益效果在于:在有向切换拓扑下,为每个跟随者设计一个分布式参考信号发生器以指数形式逼近领导者的轨迹,设计降阶动态增益卡尔曼滤波器来重构跟随者的不可测状态变量。基于参考信号发生器和滤波器,利用反步法,提出了一种分布式自适应算法,采用动态表面技术,大大降低了系统的计算负担。
46、本发明为每个跟随者设计一个分布式参考信号发生器以指数形式逼近领导者的轨迹,将领导-跟随一致问题转化成单个智能体的输出追踪问题,显著放宽通信图上的条件,使得通信图可以随时断开和连接。所设计的降阶动态增益卡尔曼滤波器不依赖于智能体之间的通信,且具有比全阶滤波器更低的阶数,通过引入动态增益,可以调节重构状态变量的收敛速度,增强系统的鲁棒性。
技术特征:
1.一种基于参考信号发生器的非线性多智能体系统输出反馈一致性控制方法,其特征在于,在有向切换拓扑下,为每个跟随者设计一个用于逼近领导者轨迹的分布式参考信号发生器;设计降阶动态增益卡尔曼滤波器来重构跟随者的不可测状态变量;利用反步法、动态表面技术,设计控制器。
2.根据权利要求1所述的方法,其特征在于,领导者的轨迹y0(t)由q个基函数构成,其形式如下:
3.根据权利要求2所述的方法,其特征在于,为每个跟随者设计分布式参考信号发生器逼近领导者的轨迹,第i个跟随者的参考信号发生器结构为:
4.根据权利要求3所述的方法,其特征在于,为每个子系统设计的降阶动态增益卡尔曼滤波器结构为:
5.根据权利要求4所述的方法,其特征在于,对称正定矩阵pi和正常数σi1、σi2、ai满足:
6.根据权利要求4所述的方法,其特征在于,由于li≥1,存在非负光滑函数φi1满足
7.根据权利要求5所述的方法,其特征在于,所述利用反步法、动态表面技术,设计控制器设计过程如下:
8.根据权利要求7所述的方法,其特征在于,反步法第1步中,
9.根据权利要求7所述的方法,其特征在于,反步法第2~(ρi-1)步中,
10.根据权利要求7所述的方法,其特征在于,反步法第ρi步中,
技术总结
本发明涉及一种基于参考信号发生器的非线性多智能体系统输出反馈一致性控制方法,在有向切换拓扑下,为每个跟随者设计一个用于逼近领导者轨迹的分布式参考信号发生器;设计降阶动态增益卡尔曼滤波器来重构跟随者的不可测状态变量;利用反步法、动态表面技术,设计控制器,实现多智能体系统的输出一致性。
技术研发人员:武晓晶,刘鑫,李志杰,甄然
受保护的技术使用者:河北科技大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!