一种超精密运动台垂向三自由度静态解耦迭代校正方法
本发明属于超精密运动控制领域,具体涉及一种超精密运动台垂向三自由度静态解耦迭代校正方法。
背景技术:
1、超精密运动台是光刻机的核心分系统,其运动性能直接决定光刻的质量和效率。光刻机中的超精密运动台是典型的多自由度运动系统。在对其进行控制时,首先要通过解耦过程将一个多输入多输出控制问题简化为多个单输入单输出控制问题,然后利用成熟的单输入单输出控制技术对各自由度控制系统进行分别设计。解耦过程包括控制解耦和测量解耦,本发明主要针对静态控制解耦过程,其任务是建立一个从逻辑轴控制力或力矩到物理轴电机出力的静态控制解耦矩阵,该矩阵建立依赖于运动台的执行器布局。然而,由于加工及装配误差等不利因素存在,运动台质心位置和各执行器安装位置将与设计值不一致,因而导致力臂误差,使得静态控制解耦矩阵不准确,最终严重影响解耦性能乃至运动控制性能。为了解决这个问题,需要对静态控制解耦矩阵进行校正。现有解决方案大都是通过增加前馈通道补偿耦合误差,这将额外增加控制系统复杂度,并且无法实质改善逻辑轴被控对象的动力学特性。
技术实现思路
1、本发明的目的是为了解决运动台质心及执行器位置与设计值不符所带来的动力学耦合问题,提供一种超精密运动台垂向三自由度静态控制解耦矩阵迭代校正方法,利用反馈控制信号对静态控制解耦矩阵进行迭代整定,该方法采用数据驱动的方式构建整定过程中所需的闭环控制系统模型,可以实现快速准确整定。该方法在不增加现有控制系统复杂度的情况下,解决了运动台质心及执行器位置与设计值不符所带来的动力学耦合问题,为后续单自由度运动精度调控奠定了重要基础,具有重要的工程应用价值。
2、为实现上述目的,本发明采取的技术方案如下:
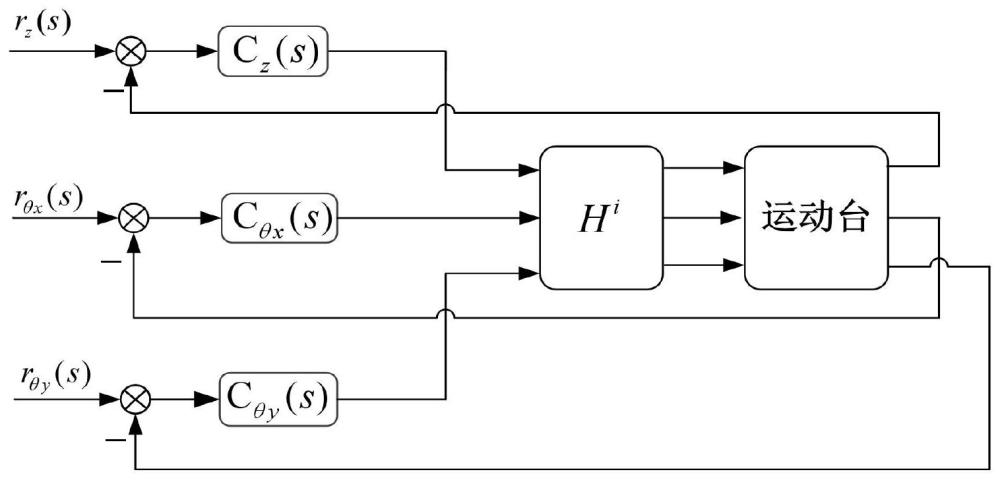
3、一种超精密运动台垂向三自由度静态解耦迭代校正方法,所述三自由度分别为z-垂向平动运动自由度,rx-绕x轴的旋转运动自由度,ry-绕y轴的旋转运动自由度;所述方法的校正对象是m×n维的静态控制解耦矩阵初始值h0,m为执行器数量,n为运动自由度;对于通过三个执行器控制垂向三自由度的运动台,m=n=3;
4、加工及装配误差所导致的各执行器力臂误差严重影响静态控制解耦矩阵的准确度。对于超精密运动台垂向三自由度,力臂误差导致的耦合效应是z自由度运动不受其他自由度的影响,z自由度的运动对rx和ry自由度有很大的影响,且rx和ry自由度之间也相互影响。为减小耦合效应,需对静态控制解耦矩阵进行整定。本发明提出一种静态控制解耦矩阵迭代校正方法,其形式为:
5、
6、式中,hi为第i次实验后的静态控制解耦矩阵,i=0,1,…,w-1,w为正整数,i代表实验次数,为6个校正参数,校正参数利用rx和ry自由度的反馈控制信号并根据最小二乘方法计算,计算方法为:
7、
8、
9、式中,为rx自由度反馈控制信号的提升向量,为ry自由度反馈控制信号的提升向量;为反馈控制信号在t=kts时刻的采样值,k=0,1,...,n-1,n为正整数,t为连续时间变量,ts为控制系统的采样周期;相似地,为反馈控制信号在t=kts时刻的采样值;
10、式中,φi和ψi形式如下:
11、
12、
13、式中,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值;
14、式中,基于数据驱动思想构造每次试验所需的各自由度被控对象传递函数,形式如下:
15、
16、
17、
18、式中,为第i次实验构造的z自由度被控对象的质量参数,为第i次实验构造的z自由度被控对象的阻尼系数,为第i次实验构造的rx自由度被控对象的转动惯量参数,为第i次实验构造的rx自由度被控对象的阻尼系数,为第i次实验构造的ry自由度被控对象的转动惯量参数,为第i次实验构造的ry自由度被控对象的阻尼系数;对于第i次实验,利用迭代形式的最小二乘方法对其进行估计,形式如下:
19、
20、
21、
22、式中,为z自由度反馈控制信号的提升向量,为反馈控制信号在t=kts时刻的采样值;
23、式中,j=0,1,…,m-1,m为正整数,j代表第i次实验中各参数的迭代次数;为j次迭代后的估计值,为j次迭代后的估计值;为j次迭代后的估计值,为j次迭代后的估计值;为j次迭代后的估计值,为j次迭代后的估计值;
24、式中,和形式如下:
25、
26、
27、
28、式中,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值,为信号在t=kts时刻的采样值;
29、对于第i次实验,给定初值设定m-1的值,从j=0逐渐迭代到j=m-1,可得到令
30、
31、设定静态控制解耦矩阵初值h0,设定w-1值,从i=0逐渐迭代到i=w-1,得到校正的静态控制解耦矩阵hw-1。
32、本发明相对于现有技术的有益效果为:与基于前馈补偿的控制解耦迭代整定方法相比,本发明公开的静态控制解耦矩阵迭代校正方法不需要额外增加前馈通道来补偿耦合误差,不增加控制系统复杂度,而且可以改善逻辑被控对象的动力学特性。
技术特征:
1.一种超精密运动台垂向三自由度静态解耦迭代校正方法,其特征在于:所述方法的校正对象是m×n维的静态控制解耦矩阵初始值h0,m为执行器数量,n为运动自由度;对于通过三个执行器控制垂向三自由度的运动台,m=n=3;所述静态解耦迭代校正方法形式为:
2.根据权利要求1所述的一种超精密运动台垂向三自由度静态解耦迭代校正方法,其特征在于:φi是φi(s)的提升形式,ψi是ψi(s)的提升形式,s为连续时间信号的拉普拉斯变换算子,φi(s),ψi(s)的具体形式如下:
3.根据权利要求1所述的一种超精密运动台垂向三自由度静态解耦迭代校正方法,其特征在于:是的提升形式,是的提升形式,是的提升形式,的具体形式如下:
技术总结
一种超精密运动台垂向三自由度静态解耦迭代校正方法,属于超精密运动控制领域。所述三自由度分别为Z‑垂向平动运动自由度,Rx‑绕X轴的旋转运动自由度,Ry‑绕Y轴的旋转运动自由度;所述方法的校正对象是m×n维的静态控制解耦矩阵初始值H<supgt;0</supgt;,m为执行器数量,n为运动自由度;对于通过三个执行器控制垂向三自由度的运动台,m=n=3;与基于前馈补偿的控制解耦迭代整定方法相比,本发明公开的静态控制解耦矩阵迭代校正方法不需要额外增加前馈通道来补偿耦合误差,不增加控制系统复杂度,而且可以改善逻辑被控对象的动力学特性。
技术研发人员:李理,赵洪阳,董岳,崔宁
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!