一种用于奶牛项圈的设备运行智能控制系统的制作方法
本发明涉及奶牛项圈智能判定,具体为一种用于奶牛项圈的设备运行智能控制系统。
背景技术:
1、奶牛项圈的智能控制系统需要能够收集和监测奶牛的健康和行为信息,例如体温、活动量、进食量和饮水量等数据,并通过无线传输模块将这些数据传输到云端。在云端,可以使用人工智能算法对数据进行分析,以便在奶牛出现健康问题或异常行为时提供及时的警报和诊断。此外,智能控制系统还可以对奶牛进行自动化的管理,例如控制喂食和饮水,调节光照,以确保奶牛在舒适的条件下生产高质量的牛奶。最后,该设备应具有耐用、防水、抗污染和易于维护等特点,以适应农场环境的操作需求,包括传感器技术、无线通信技术、云计算和大数据分析、自动化控制技术、设备工程和材料科学;
2、现有的用于奶牛项圈的设备运行智能控制系统,无法自动判断项圈是否转变至不正确的佩戴角度,无法确定探测数据异常的原因,无法根据探测数据异常的情况判断是否将数据录入数据库,无法在项圈佩戴倾斜时提醒用户及时调整项圈佩戴角度,其实用性存在一定的局限性。
技术实现思路
1、本发明提供了一种用于奶牛项圈的设备运行智能控制系统,具备判断奶牛佩戴的项圈是否倾斜,并将数据录入数据库,不断更新数据库的数据,使数据库的数据更加准确,如果有外界影响因素对数据产生影响,则不将该数据录入数据库,使数据库中的数据维持在单一环境下产生的数据,保证数据采集环境的单一性,通过异常数据显示模块,对用户进行提醒,使用户能够及时获取到异常数据所对应的奶牛的相关信息,并及时进行调整,使数据恢复正常的有益效果,解决了上述背景技术中所提到奶牛项圈智能判定的过程中,无法自动判断项圈是否转变至不正确的佩戴角度,无法确定探测数据异常的原因,无法根据探测数据异常的情况判断是否将数据录入数据库,无法在项圈佩戴倾斜时提醒用户及时调整项圈佩戴角度,其实用性存在一定的局限性的问题。
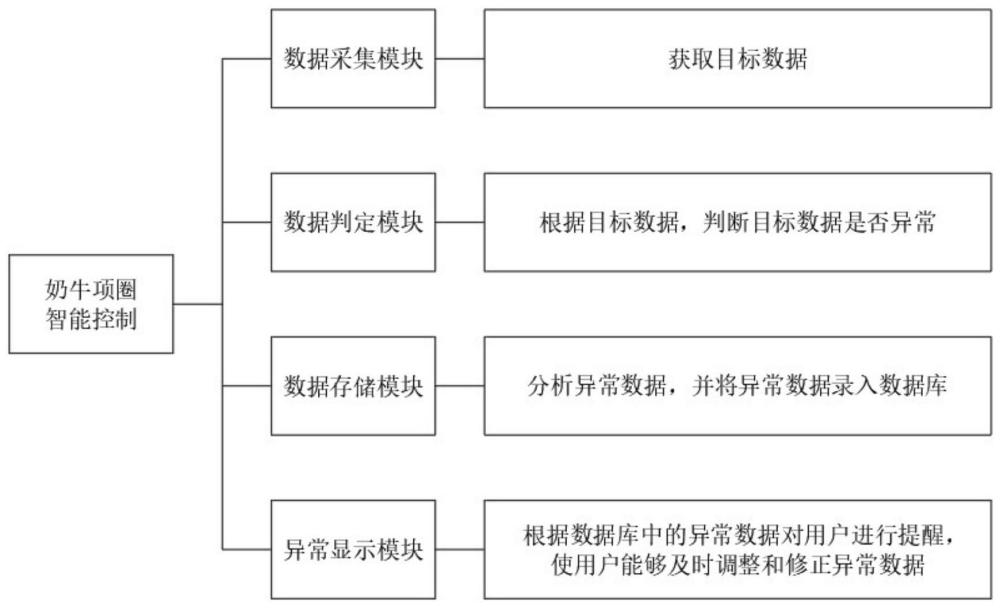
2、本发明提供如下技术方案:一种用于奶牛项圈的设备运行智能控制系统,包括:
3、数据采集模块:获取目标数据,所述目标数据包括目标奶牛的位置、目标奶牛的项圈距离地面的高度、以及目标奶牛的朝向;
4、数据判定模块:根据目标数据,判断目标数据是否异常;
5、数据存储模块:分析异常数据,并将异常数据录入数据库;
6、异常显示模块:根据数据库中的异常数据对用户进行提醒,使用户能够及时调整和修正异常数据。
7、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述根据目标数据,判断目标数据是否异常,具体包括:
8、通过超声波传感器,实时获取目标奶牛的项圈距离地面的高度,将该高度定为目标项圈高度;
9、对目标项圈高度获取历史数据;
10、根据历史数据,形成行为轨迹统计集合;
11、根据行为轨迹统计集合,将目标奶牛站立时的高度定为第一高度,将目标奶牛卧下时的高度定为第二高度;
12、分别计算第一高度平均值和第二高度平均值;
13、设定第一高度阈值;
14、设定第二高度阈值;
15、若目标项圈高度未超过第一高度阈值或第二高度阈值,则判定目标数据正常;
16、所述数据存储模块将该数据录入数据库;
17、若目标项圈高度超过第一高度阈值和第二高度阈值,则判定目标数据异常;
18、执行数据异常分析策略。
19、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行数据异常分析策略,具体包括:
20、获取目标奶牛的当前目标项圈高度;
21、获取当前采集时间;
22、提取行为轨迹统计集合中当前采集时间所对应的目标项圈高度;
23、若对应的目标项圈高度为第一高度,则执行第一采集策略;
24、若对应的目标项圈高度为第二高度,则执行第二采集策略;
25、获取比值差值;
26、设定比值阈值;
27、比较比值差值和比值阈值;
28、若比值差值超过比值阈值,则执行信息分析策略;
29、若比值差值未超过比值阈值,则将探测的目标项圈高度数据录入数据库,并标记为倾斜数据;
30、所述异常显示模块显示出现倾斜数据,并显示出现倾斜数据的目标奶牛信息,使用户及时调整和修正倾斜数据。
31、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行第一采集策略,具体为:
32、获取目标奶牛的当前目标项圈高度,将该高度定为第一判定项圈高度;
33、获取第一高度平均值;
34、计算第一判定项圈高度与第一高度平均值的比值,将该比值定为第一比值;
35、暂停采集数据;
36、等待达到行为轨迹统计集合中第二高度对应的采集时间;
37、再次获取目标奶牛的当前目标项圈高度,将该高度定为第二判定项圈高度;
38、获取第二高度平均值;
39、计算第二判定项圈高度与第二高度平均值的比值,将该比值定为第二比值;
40、计算第一比值与第二比值的差值,将该差值定为比值差值。
41、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行第二采集策略,具体为:
42、获取目标奶牛的当前目标项圈高度,将该高度定为第二判定项圈高度;
43、获取第二高度平均值;
44、计算第二判定项圈高度与第二高度平均值的比值,将该比值定为第二比值;
45、暂停采集数据;
46、等待达到行为轨迹统计集合中第一高度对应的采集时间;
47、再次获取目标奶牛的当前目标项圈高度,将该高度定为第一判定项圈高度;
48、获取第一高度平均值;
49、计算第一判定项圈高度与第一高度平均值的比值,将该比值定为第一比值;
50、计算第一比值与第二比值的差值,将该差值定为比值差值。
51、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行信息分析策略,具体为:
52、获取目标奶牛的位置;
53、将超过第一高度阈值和第二高度阈值、且比值差值超过比值阈值的目标项圈高度的数值,定为探测距离的数值;
54、以目标奶牛为圆心、探测距离为半径,形成探测范围;
55、获取目标奶牛项圈的中心点;
56、以目标奶牛项圈的中心点为原点,向目标奶牛的项圈的采集模块方向形成向量方向,将该方向定为第一目标方向;
57、以目标奶牛为原点、第一目标方向为探测方向,获取探测范围内其他奶牛的位置,将该奶牛定为探测奶牛;
58、执行数据影响分析策略;
59、若探测的目标项圈高度数据受探测奶牛影响,则放弃数据录入;
60、若探测的目标项圈高度数据不受探测奶牛影响,则将探测的目标项圈高度数据录入数据库,并标记为倾斜数据。
61、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行数据影响分析策略,具体为:
62、以目标奶牛的项圈的采集模块为原点,由目标奶牛的尾部向头部形成向量方向,将该方向定为第二目标方向;
63、以探测奶牛的项圈的采集模块为原点,向探测奶牛的尾部向头部形成向量方向,将该方向定为第三目标方向;
64、比较第二目标方向和第三目标方向;
65、若第二目标方向和第三目标方向为相同方向,则执行第一影响分析策略;
66、若第二目标方向和第三目标方向为相反方向,则执行第二影响分析策略。
67、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行第一影响分析策略,具体为:
68、获取目标奶牛的身长;
69、获取探测奶牛的身长、位置、以及项圈高度数据;
70、以探测奶牛的项圈和目标奶牛的项圈为对角点作矩形,将该矩形定为测距矩形;
71、分别计算测距矩形的第一边长和第二边长,将测距矩形的第一边长定为第一距离,将测距矩形的第二边长定为第二距离;
72、比较第二距离和探测奶牛的身长;
73、若第二距离大于探测奶牛的身长,则判定探测的目标项圈高度数据不受探测奶牛影响;
74、若第二距离小于探测奶牛的身长,则以目标奶牛为原点、第二目标方向为向量方向作坐标轴;
75、若探测奶牛的项圈位于正半轴,则判定探测的目标项圈高度数据受探测奶牛影响;
76、若探测奶牛的项圈位于负半轴,则判定探测的目标项圈高度数据不受探测奶牛影响。
77、作为本发明所述用于奶牛项圈的设备运行智能控制系统的一种可选方案,其中:所述执行第二影响分析策略,具体为:
78、获取目标奶牛的身长;
79、获取探测奶牛的身长、位置、以及项圈高度数据;
80、以探测奶牛的项圈和目标奶牛的项圈为对角点作矩形,将该矩形定为测距矩形;
81、分别计算测距矩形的第一边长和第二边长,将测距矩形的第一边长定为第一距离,将测距矩形的第二边长定为第二距离;
82、比较第二距离和探测奶牛的身长;
83、若第二距离大于探测奶牛的身长,则判定探测的目标项圈高度数据不受探测奶牛影响;
84、若第二距离小于探测奶牛的身长,则以目标奶牛为原点、第二目标方向为向量方向作坐标轴;
85、若探测奶牛的项圈位于负半轴,则判定探测的目标项圈高度数据受探测奶牛影响;
86、若探测奶牛的项圈位于正半轴,则判定探测的目标项圈高度数据不受探测奶牛影响。
87、本发明具备以下有益效果:
88、1、该用于奶牛项圈的设备运行智能控制系统,通过历史数据和当前采集的项圈高度数据进行对比,判断奶牛佩戴的项圈是否倾斜,并判断是否将数据录入数据库,不断更新数据库的数据,使数据库的数据更加准确。
89、2、该用于奶牛项圈的设备运行智能控制系统,通过对比倾斜数据和历史高度平均值,判断项圈倾斜的数据是否有其他影响因素,如果有外界影响因素对数据产生影响,则不将该数据录入数据库,使数据库中的数据维持在单一环境下产生的数据,保证数据采集环境的单一性。
90、3、该用于奶牛项圈的设备运行智能控制系统,通过异常数据显示模块,在数据库中录入无影响因素的异常数据时,对用户进行提醒,使用户能够及时获取到异常数据所对应的奶牛的相关信息,并及时进行调整,使数据及时恢复正常。
- 还没有人留言评论。精彩留言会获得点赞!