一种接触式低应力调控机床的控制方法与流程
本发明属于低应力控制领域,具体涉及一种接触式低应力调控机床的控制方法。
背景技术:
1、当前接触式低应力调控机床的控制只能以平面的方式对构件进行接触,各个超声波激励器接触的压力会因被调控构件的表面形状变化而不同,并且,当构件形状不规则时,会导致存在多个激励器无法与被调控构件进行接触。另一方面,在低应力调控领域,当前也不存在针对100多个电机的协调控制。
技术实现思路
1、本发明的目的在于提供一种接触式低应力调控机床的控制方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案为:
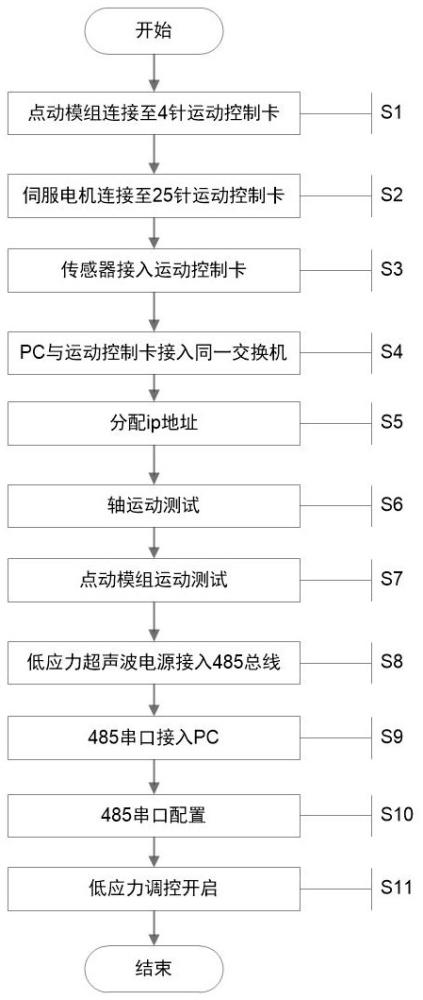
3、一种接触式低应力调控机床的控制方法,包括以下步骤:
4、优选的,每个低应力点动模组都由对应的一个步进电机单独控制,以16个为一组,接至4针接口的16轴运动控制卡上,由7个16轴运动控制卡同时控制108个点动模组的运动,由点动模组上配备的测距传感器来感应超声波激励器头部距离被调控构件表面的距离,根据被调控构件的形状不同,各个点动模组移动的距离不同,使得每个点动模组都能有效接触到被调控构件的表面,可以避免超声波激励器的空运行。
5、优选的,所有伺服电机为一组,接至25针接口的12轴运动控制卡上,由该运动控制卡控制天车、左滑车、右滑车三大部件的运动,并根据三大部件的限位开关来对其运动范围进行限制。
6、优选的,上述用到的所有运动控制卡与控制端pc电脑接入同一交换机,并分配同一网段的ip地址,测试其局域网络连接情况。
7、优选的,所有低应力超声波电源以32个为一组,共接入4根485串口总线,分别插在pc端的4个串口上,并分别对4个串口进行配置。
8、与现有技术相比,本发明具有如下有益效果:
9、1、可以使点动模组自动根据构件外形进行贴合;
10、2、可以使接触式低应力调控机床运行更加灵活,提高调控效率。
技术特征:
1.一种接触式低应力调控机床的控制方法,其特征在于,包括接触式低应力调控机床的动作控制顺序流程:
2.根据权利要求1所描述的一种接触式低应力调控机床的控制方法,其特征在于,低应力点动模组部分与天车及左、右滑车所使用的运动控制卡规格及数量不同,前者使用7个16轴的运动控制卡,其轴的接口为4针,后者使用1个8轴运动控制卡,其轴的接口为25针。
3.根据权利要求1所描述的一种接触式低应力调控机床的控制方法,其特征在于,低应力点动调控模组依靠测距传感器io信号实时通过运动控制卡控制步进电机的转动,实现对构件表面的贴合动作。
技术总结
本发明公开了一种接触式低应力调控机床的控制方法,属于低应力控制领域。该方法用来以无线的方式实现对接触式低应力调控机床的状态显示及动作控制。接触式低应力调控机床包含108个点动模组,每个低应力点动模组包含一个步进电机和一个激光测距传感器,由7个16轴的运动控制卡进行控制。天车、左滑车、右滑车分别配备1个伺服电机和2个限位开关,由1个8轴的运动控制卡进行控制。控制流程为与8个运动控制卡建立连接,控制天车顶部点动模组收回,移开天车,移动左、右滑车,吊装即将进行应力调控的构件,然后将左、右滑车与天车移动回位,控制点动模组靠近构件表面进行贴合,开始应力调控,直至完成应力调控后取出构件。
技术研发人员:王钬杰,李鑫,田志丹,宋健,胥欢
受保护的技术使用者:康硕(山西)低应力制造系统技术研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!