一种四旋翼无人机的高度和姿态跟踪控制方法及系统
本发明属于四旋翼无人机跟踪控制,特别涉及一种四旋翼无人机的高度和姿态跟踪控制方法及系统。
背景技术:
1、四旋翼无人机具有体积小、结构简单、可垂直起降等优点,被广泛的应用于控制拍摄、农业生产、消防救援等诸多领域。但是,四旋翼无人机具有欠驱动性、非线性以及强耦合性等特点,这些特点使得设计高性能四旋翼无人机控制器具有非常大的难度。
2、目前,已经有许多控制方法研究四旋翼无人机的高度和姿态跟踪,例如滑模控制、鲁棒控制、模糊逻辑控制、自适应控制等等,这些方法大部分都是基于连续时间下的控制方法,即控制方法的设计是基于四旋翼无人机连续时间模型。然而微处理器即计算机,只能处理离散时间的信号,因此,微处理器在控制四旋翼无人机时候,需要将连续的控制器转化为离散的信号,这使得基于四旋翼无人机连续时间模型的控制方法有很大的局限性。综上,基于离散时间模型设计的控制器方法更实用,且更适合微处理器的计算特性。
3、在连续时间中,反步法已被证明在不确定的非线性系统的自适应控制中表现良好,已经被用于飞行器的输出反馈控制。但是在连续时间反步法的设计过程中,虚拟控制器存在导数,导致存在微分爆炸问题,因此动态面控制通过在设计过程中加入一阶滤波器,解决了微分爆炸问题。然而动态面控制没有对滤波器产生的滤波误差进行补偿,导致其无法进一步提高系统的跟踪性能,而命令滤波反步法一方面通过命令滤波器的输出逼近虚拟信号的导数,解决了微分爆炸的问题,一方面通过添加了误差补偿机制优化了动态面控制,减少了滤波器误差的影响,提高了系统的跟踪性能。可见,命令滤波反步法控制有着优秀的跟踪性能。
4、由于离散时间反步法控制设计过程中会出现由未来信息引起的因果问题,导致连续时间反步法控制方法的设计步骤无法直接应用在离散时间反步法控制中,此外四旋翼无人机在设计时存在外部的扰动和自身模型的不确定部分,因此在离散时间反步法的基础上结合命令滤波、模糊逻辑控制、自适应控制,使四旋翼无人机实现优秀的跟踪性能具有重要意义。
技术实现思路
1、本发明的目的在于提出一种四旋翼无人机的高度和姿态跟踪控制方法,该方法在在离散时间反步法的基础上,结合命令滤波、模糊逻辑控制以及自适应控制技术,以解决四旋翼无人机存在外部干扰和系统不确定性情况下的高度和姿态跟踪控制。
2、本发明为了实现上述目的,采用如下技术方案:
3、一种四旋翼无人机的高度和姿态跟踪控制方法,包括如下步骤:
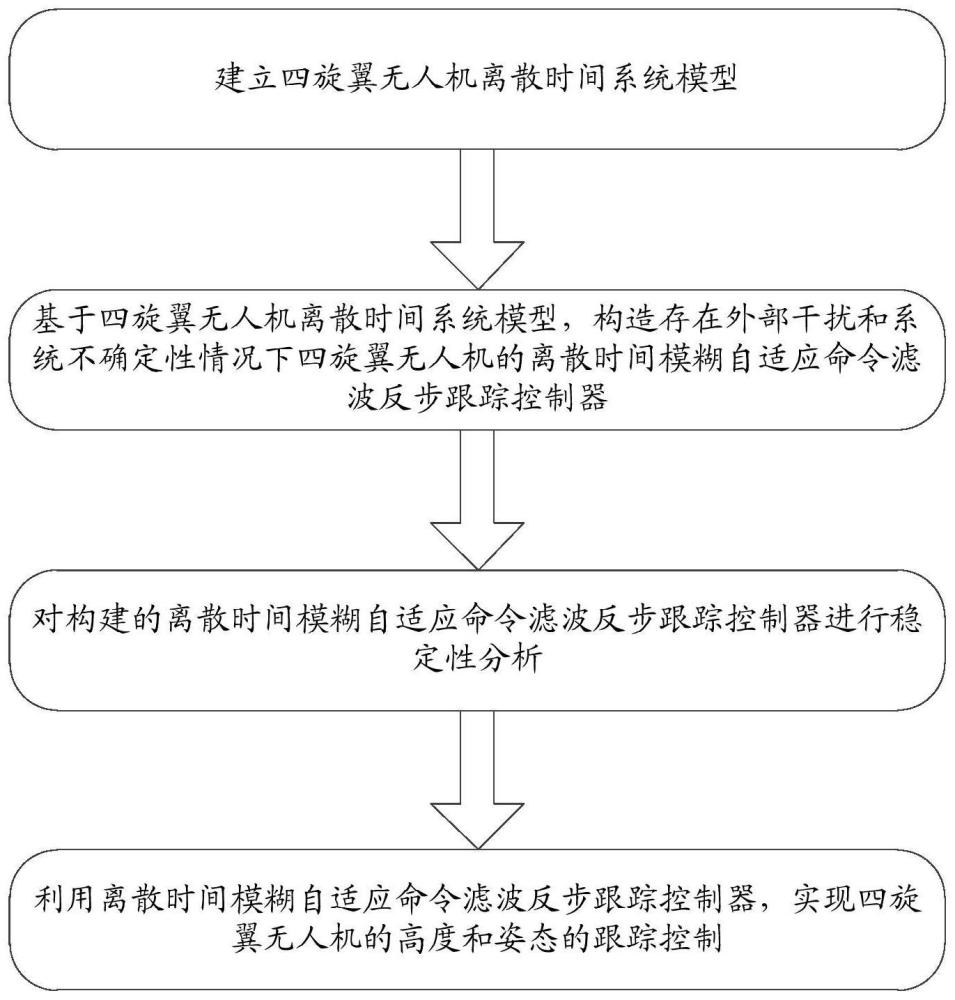
4、步骤1.建立四旋翼无人机离散时间系统模型;
5、步骤2.基于得到的四旋翼无人机离散时间系统模型,构造存在外部干扰和系统不确定性情况下四旋翼无人机的离散时间模糊自适应命令滤波反步跟踪控制器;
6、步骤3.对离散时间模糊自适应命令滤波反步跟踪控制器进行稳定性分析;
7、步骤4.利用构建的四旋翼无人机的离散时间模糊自适应命令滤波反步跟踪控制器,实现四旋翼无人机的高度和姿态的跟踪控制。
8、此外,在四旋翼无人机的高度和姿态跟踪控制方法的基础上,本发明还提出了一种与之相适应的四旋翼无人机的高度和姿态跟踪控制系统,其采用如下技术方案:
9、一种四旋翼无人机的高度和姿态跟踪控制系统,包括:
10、模型建立模块,用于建立四旋翼无人机离散时间系统模型;
11、控制器设计模块,用于基于构建的四旋翼无人机离散时间系统模型,构造存在外部干扰和系统不确定性情况下四旋翼无人机的离散时间模糊自适应命令滤波反步跟踪控制器;
12、稳定性分析模块,用于对离散时间模糊自适应命令滤波反步跟踪控制器进行稳定性分析;
13、以及高度和姿态跟踪控制模块,用于利用构建的四旋翼无人机的离散时间模糊自适应命令滤波反步跟踪控制器,实现四旋翼无人机的高度和姿态的跟踪控制。
14、此外,在上述四旋翼无人机的高度和姿态跟踪控制方法的基础上,本发明还提出了一种计算机设备,该计算机设备包括存储器和一个或多个处理器。
15、所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,用于实现上面述及的四旋翼无人机的高度和姿态跟踪控制方法的步骤。
16、此外,在上述四旋翼无人机的高度和姿态跟踪控制方法的基础上,本发明还提出了一种计算机可读存储介质,其上存储有程序。该程序被处理器执行时,用于实现上面述及的四旋翼无人机的高度和姿态跟踪控制方法的步骤。
17、与目前的四旋翼无人机的跟踪控制方法相比,本发明方法具有如下优点:
18、如上所述,本发明述及了一种四旋翼无人机的高度和姿态跟踪控制方法,该方法提出了一种新颖的离散时间反步法,可以解决离散时间反步法中出现的因果问题,并且离散时间控制可以避免连续时间控制器离散化得到实际控制信号过程中所产生的误差。与目前的离散时间控制方法相比,本发明选择具有优秀跟踪性能的命令滤波反步法控制方法,并使用一阶低通滤波器解决了离散时间反步控制方法中存在的因果问题,并且对滤波器的输出误差进行了补偿,降低了滤波器输出误差对于性能的影响,实现了良好的稳态和瞬态性能。本发明使用了加权李雅普诺夫函数,扩大了控制相关参数的取值范围。同时,本发明还考虑到了外部干扰问题和系统不确定性的问题,并结合了模糊逻辑控制和自适应控制,解决了上述两个问题,实现了四旋翼无人机存在外部干扰和系统不确定性情况下高度和姿态跟踪控制。
技术特征:
1.一种四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
3.根据权利要求1所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
4.根据权利要求2所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
5.根据权利要求4所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
6.根据权利要求5所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
7.根据权利要求6所述的四旋翼无人机的高度和姿态跟踪控制方法,其特征在于,
8.一种四旋翼无人机的高度和姿态跟踪控制系统,其特征在于,包括:
9.一种计算机设备,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,其特征在于,所述处理器执行所述可执行代码时,实现如权利要求1至7任一项所述的四旋翼无人机的高度和姿态跟踪控制方法的步骤。
10.一种计算机可读存储介质,其上存储有程序,其特征在于,程序被处理器执行时,实现如权利要求1至7任一项所述的四旋翼无人机的高度和姿态跟踪控制方法的步骤。
技术总结
本发明属于四旋翼无人机跟踪控制技术领域,具体公开了一种四旋翼无人机的高度和姿态跟踪控制方法及系统。本发明方法在四旋翼无人机的高度和姿态跟踪过程中,通过设计虚拟控制器、一阶低通滤波器、误差补偿系统以及实际控制信号等步骤,使得飞行器的高度子系统和姿态子系统的跟踪误差收敛于期望的邻域内。本发明方法不仅能够避免连续时间控制受计算机采样时间影响的问题,还能够保证四旋翼无人机在存在外部干扰和系统不确定行的情况下姿态和高度跟踪误差收敛到任意期望的邻域内,并且闭环系统中的所有信号都有界。此外,本发明还给出了具体实例,很好的验证了本发明所提跟踪控制方法的有效性。
技术研发人员:赵林,赵洋,孙奥宇,白晓辉,张伟轶,于金鹏,刘振
受保护的技术使用者:青岛大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!