一种抗执行器指令速率和幅值饱和的PI控制器设计方法与流程
本发明涉及控制,尤其涉及一种抗执行器指令速率和幅值饱和的pi控制器设计方法。
背景技术:
1、控制系统中控制器设计的目标是使被控对象能够按照期望的指令运行,但是在实际的工业生产过程中,被控对象的执行器常常由于其物理特性而存在各种限制,如电机系统中电压、电流、转矩和转速等有饱和限制。实际系统中执行器的饱和特性主要包括幅值饱和速率饱和,幅值饱和特性指执行器的输出信号的幅值存在一个上限阈值,速率饱和是指执行器的输出信号的变化速率存在一个上限阈值,饱和限制影响控制性能的同时,也给控制器设计带来挑战。
2、随着现代工业的发展,高科技制造对控制精度、控制性能和鲁棒性的要求越来越高,如高速硬盘系统、飞行器系统和自动驾驶系统等,执行器的速率饱和现象也成为提升控制性能的一大阻碍。执行器的速率饱和特性会降低被控对象的响应速度,产生指令信号幅值衰减和相位滞后,无法满足精密控制要求。
3、控制系统中的pid控制器或pi控制器是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高等特点,广泛应用于各种工业控制系统中。pi控制器根据控制系统给定期望指令值和测量反馈值的差值构成指令偏差信号,将偏差信号的比例值和积分值的线性组合构成控制信号给到控制对象的执行器中,以此使系统的输出跟踪期望指令值。pi控制器的积分环节可以消除系统静差,但是当执行器输出存在幅值饱和时,积分环节会根据偏差信号持续积分,即使当指令偏差信号反号时,由于先前累加的积分值,导致控制信号会延后反向变化,执行器退出饱和的限制变慢,导致系统产生很大的超调量,响应过渡时间变长,严重时甚至导致系统不稳定。因此,研究并解决抗执行器指令速率饱和与指令幅值饱和的pi控制器设计问题具有重大的工业应用前景。
技术实现思路
1、基于以上所述,本发明的目的在于,针对考虑被控系统执行器存在指令速率饱和与指令幅值饱和特性时的控制器设计应用问题,提供一种抗执行器指令速率和幅值饱和的pi控制器设计方法。
2、为达上述目的,本发明采用以下技术方案:
3、一种抗执行器指令速率和幅值饱和的pi控制器设计方法,包括以下步骤:
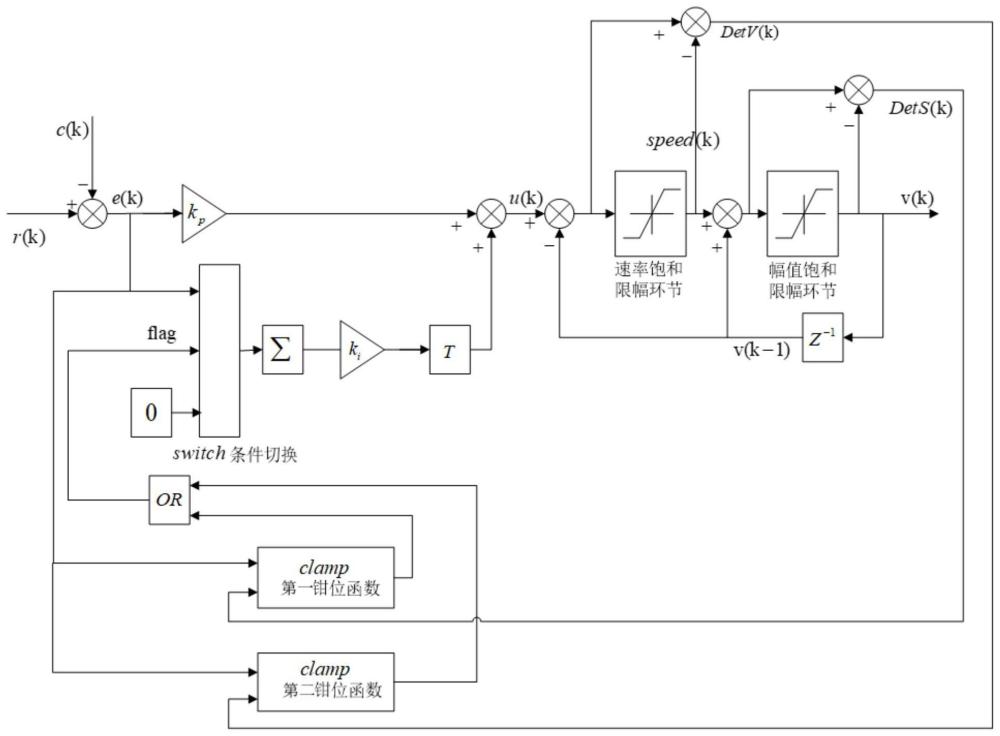
4、设计离散形式的抗饱和pi控制器,所述控制器带有是否停止或继续执行积分i环节的条件开关判断模块,根据所述条件开关判断模块输出与p环节输出的线性组合计算出原始控制指令信号;
5、设计带开关的所述积分i环节算法,设计钳位函数,在所述钳位函数内部判断出积分饱和方向,分别计算出幅值限幅钳位信号和速率限幅钳位信号,根据所述幅值限幅钳位信号和所述速率限幅钳位信号的逻辑或值标志位,将所述逻辑或值标志位作为所述停止或继续积分i环节的条件开关判断模块的判断条件;
6、根据所述抗饱和pi控制器输出的原始控制指令信号,设计离散的速率限幅算法和幅值限幅算法,将控制量的幅值和速率限制到符合所述执行器饱和特性的范围内,计算出有效的执行器控制指令信号。
7、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,根据所述条件开关判断模块输出与p环节输出的线性组合计算出原始控制指令信号,具体为:
8、计算所述原始控制指令信号u(k):
9、
10、
11、e(k)=r(k)-c(k)
12、其中,sitch(e(j),0,flag)为开关切换函数,e(k)为系统输入指令偏差信号,r(k)为给定期望指令值,c(k)为测量反馈值,kp为控制器比例增益参数,ki为控制器积分增益参数,t为控制器的离散时间步长,j和k为离散项的序号;
13、通过逻辑或值标志位flag的值作为所述停止或继续执行积分i环节的开关判断条件,即当所述逻辑或值标志位flag的值为1时,将当前所述积分i环节输入的值设为0,相当于停止执行所述积分i环节;当所述逻辑或值标志位flag的值为0时,将当前所述积分i环节输入的值设为指令偏差信号e(j),相当于继续执行所述积分i环节。
14、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,所述设计钳位函数,具体包括:
15、设计所述钳位函数clamp(e(k),det),包括第一钳位函数和第二钳位函数,所述第一钳位函数和所述第二钳位函数功能相同,主要是逻辑判断,但所述第一钳位函数和所述第二钳位函数的输入与输出不同;
16、所述第一钳位函数的两个输入分别是所述积分环节输入偏差信号e(k)和原始控制指令信号幅值超限方向dets(k),所述第一钳位函数的输出为幅值限幅钳位信号clamp(e(k),dets(k));
17、所述第二钳位函数的两个输入分别是所述积分环节输入偏差信号e(k)和原始控制指令信号速率超限方向detv(k),所述第二钳位函数的输出为幅值速率钳位信号clamp(e(k),detv(k))。
18、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,所述将所述逻辑或值标志位作为所述停止或继续积分i环节的条件开关判断模块的判断条件,具体为:
19、当所述控制器输出信号到达所述执行器的幅值饱和或速率饱和条件,且在所述积分i环节作用下所述控制器输出信号将变得更加饱和,对所述积分i环节进行切断,停止所述积分i环节的计算执行;
20、当所述控制器输出信号到达所述执行器的幅值饱和或速率饱和条件,但在所述积分i环节作用下所述控制器输出信号将退出饱和状态,则不对所述积分i环节进行关断,继续所述积分i环节的计算执行。
21、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,所述逻辑或值标志位的计算过程具体为:
22、根据所述速率限幅钳位信号clamp(e(k),detv(k))和所述幅值限幅钳位信号clamp(e(k),dets(k))的逻辑或值计算得到所述逻辑或值标志位flag,计算公式如下:
23、flag=clamp(e(k),detv(k))
24、or
25、clamp(e(k),dets(k))
26、其中,or表示对前后两数进行逻辑或运算;
27、输入所述系统输入指令偏差信号e(k)和饱和超限方向det,其中所述饱和超限方向det方向是速率超限方向detv(k)或幅值超限方向dets(k);
28、如果所述系统输入指令偏差信号e(k)大于0,并且所述饱和超限方向det大于0,输出clamp(e(k),det)为1;
29、如果所述系统输入指令偏差信号e(k)小于0,并且所述饱和超限方向det小于0,输出clamp(e(k),det)为1;
30、如果以上两条都不满足,输出clamp(e(k),det)为0。
31、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,所述设计离散的速率限幅算法和幅值限幅算法,具体为:根据所述执行器的速率饱和限幅值和幅值饱和限幅值,分别设计速率饱和限幅环节和幅值饱和限幅环节,所述速率饱和限幅环节和所述幅值饱和限幅环节串联。
32、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,所述分别设计速率饱和限幅环节和幅值饱和限幅环节,具体为:
33、所述速率饱和限幅环节的计算公式如下:
34、speed(k)=sat(u(k)-v(k-1),-t×maxv,t×maxv)
35、v(k-1)=z-1×v(k)
36、
37、其中,maxv为所述执行器的速率饱和限幅值的绝对值大小,t为控制器的离散时间步长;v(k-1)为所述有效的执行器控制指令信号v(k)的前一步值,sat(x,a,b)为饱和函数;
38、所述幅值饱和限幅环节的输出即为所述有效的执行器控制指令信号v(k),所述幅值饱和限幅环节的输出为:
39、v(k)=sat(speed(k)+v(k-1),-max s,max s)
40、
41、其中,maxs为执行器的幅值饱和限幅值的绝对值大小。
42、作为一种抗执行器指令速率和幅值饱和的pi控制器设计方法的优选方案,还包括:
43、根据所述逻辑或值标志位,计算所述积分i环节的开关切换函数的输出值,根据所述开关切换函数的输出值,计算所述控制器输出的原始控制量u(k),将所述控制器输出的原始控制量u(k)依次经过到所述速率饱和限幅环节和所述幅值饱和限幅环节,最后计算出所述有效的执行器控制指令信号v(k),所述执行器控制指令信号v(k)满足所述执行器指令速率饱和约束与指令幅值饱和约束,即得到了所述抗执行器指令速率饱和与指令幅值饱和的pi控制器。
44、一种抗执行器指令速率和幅值饱和的pi控制器,其特征在于,由上述任意一项方法设计而成。
45、本发明的有益效果为:
46、本发明在满足特定的条件下关闭积分环节作用,相比与常规的通过反向计算法抗积分饱和的策略而言,减少了反向计算法中控制信号在饱和环节前后差值的比例参数的设计过程,结构简单,便于实际工程使用;同时考虑了控制信号幅值饱和与速率饱和的情况,泛用性较好,可适用于执行器信号幅值受限且需要快速响应的控制系统,如高速硬盘系统、飞行器系统和自动驾驶系统等。
- 还没有人留言评论。精彩留言会获得点赞!