一种基于鲁棒优化的无动力返场段轨迹规划方法
本发明涉及一种基于鲁棒优化的无动力返场段轨迹规划方法,能够有效针对不确定条件下可重复使用飞行器生成无动力返场段轨迹。
背景技术:
1、可重复使用飞行器无动力返场段飞行过程中不确定性因素客观存在,如返场段初始状态存在不确定性、动力学参数存在不确定性等,在不考虑不确定性的影响时,随机干扰对结果的影响较大,传统轨迹规划方法的轨迹离散度较大,计算耗时长,同时轨迹偏差修正会给制导控制系统增加负担,无法满足实时校正的需求。
技术实现思路
1、本发明考虑飞行器返场段动力学参数以及初始状态的不确定性,提供一种不确定条件下的可重复使用飞行器无动力返场段鲁棒轨迹规划方法。
2、为实现上述目的,本发明采取的技术方案如下:
3、一种基于鲁棒优化的无动力返场段轨迹规划方法,所述方法为:
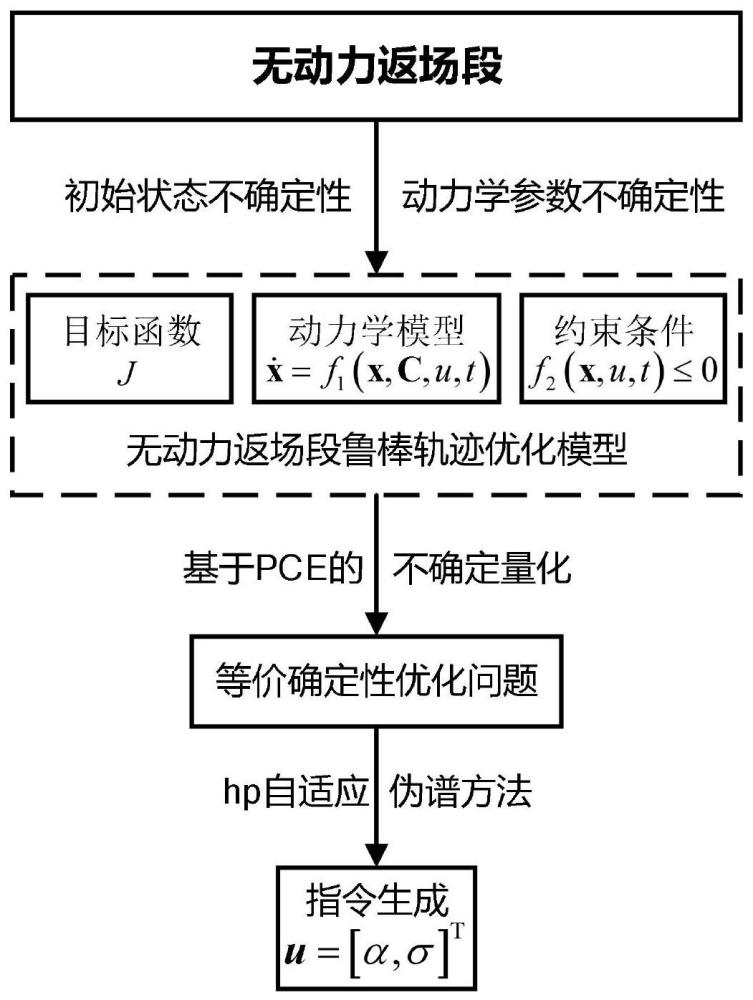
4、步骤一:考虑不确定性的无动力返场段鲁棒轨迹优化模型建立;
5、步骤二:基于混沌多项式理论的不确定度量化和传播;
6、步骤三:基于hp自适应伪谱方法的鲁棒轨迹优化求解;
7、步骤四:指令生成,进行无动力返场段飞行。
8、本发明相对于现有技术的有益效果为:本发明基于鲁棒优化策略和不确定性量化技术,提出了一种新的不确定性条件下的无动力返场段轨迹规划方法。一方面考虑了动力学参数的不确定性和初始状态的不确定性,另一方面考虑了约束满足的可靠性和性能指标对不确定性的不敏感性。本发明所提轨迹规划方法较传统轨迹规划方法抗干扰能力强,不确定条件下轨迹离散度小,可有效降低飞行风险,算法计算量小,可满足实时校正的需求,具有较好的应用前景。
技术特征:
1.一种基于鲁棒优化的无动力返场段轨迹规划方法,其特征在于:所述方法为:
2.根据权利要求1所述的一种基于鲁棒优化的无动力返场段轨迹规划方法,其特征在于:所述步骤一具体为:
3.根据权利要求1所述的一种基于鲁棒优化的无动力返场段轨迹规划方法,其特征在于:所述步骤二具体为:首先考虑不确定性的动力学方程转化,考虑x(t0)的初始状态不确定性和c的参数不确定性,无动力返场段动力学系统不确定性传播的混沌多项式展开设计如下:
4.根据权利要求1所述的一种基于鲁棒优化的无动力返场段轨迹规划方法,其特征在于:所述步骤三具体为:
5.根据权利要求1所述的一种基于鲁棒优化的无动力返场段轨迹规划方法,其特征在于:所述步骤四具体为:完成算法设计后,根据初末状态设计不确定条件下的制导律u,生成攻角α和倾侧角σ指令,将该指令作为时域系统的输入即可得到飞行轨迹,进行无动力返场段飞行。
技术总结
一种基于鲁棒优化的无动力返场段轨迹规划方法,所述方法为:考虑不确定性的无动力返场段鲁棒轨迹优化模型建立;基于混沌多项式理论的不确定度量化和传播;基于hp自适应伪谱方法的鲁棒轨迹优化求解;指令生成,进行无动力返场段飞行。本发明基于鲁棒优化策略和不确定性量化技术,提出了一种新的不确定性条件下的无动力返场段轨迹规划方法。一方面考虑了动力学参数的不确定性和初始状态的不确定性,另一方面考虑了约束满足的可靠性和性能指标对不确定性的不敏感性。本发明所提轨迹规划方法较传统轨迹规划方法抗干扰能力强,不确定条件下轨迹离散度小,可有效降低飞行风险,算法计算量小,可满足实时校正的需求,具有较好的应用前景。
技术研发人员:韦常柱,浦甲伦,魏金鹏,孙智力,林建锋
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!