一种用于舵机控制系统的控制方法与流程
本发明属于自动控制领域,具体涉及一种用于舵机控制系统的控制方法。
背景技术:
1、随着电机技术不断进步、各种控制技术不断出现,电动舵机以其简单可靠、成本低廉、动态特性优良、易于控制等特点,已成为制导炮弹最常用的舵机系统。电动舵机是制导炮弹飞行控制系统的重要组成部分,是控制系统的执行机构。在炮弹飞行过程中舵机控制器接收弹载计算机的控制指令,经舵机驱动电路解算后输出舵偏角信号,控制电机旋转,从而驱动舵面偏转,产生弹体所需要的控制力矩控制弹体飞行。随着科技的发展,人们对导弹精度的要求越来越高,舵控制系统又对导弹的精度产生直接的影响,因此,设计一种用于舵机控制系统的控制方法是非常必要的。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是如何提供一种用于舵机控制系统的控制方法,以解决一个舵机控制系统控制四套舵机,通过舵机控制系统对外部信号处理及内部舵信号的反馈,实现四套舵机的精准调控,提升导弹的总体精度。
3、(二)技术方案
4、为了解决上述技术问题,本发明提出一种用于舵机控制系统的控制方法,包括以下步骤:
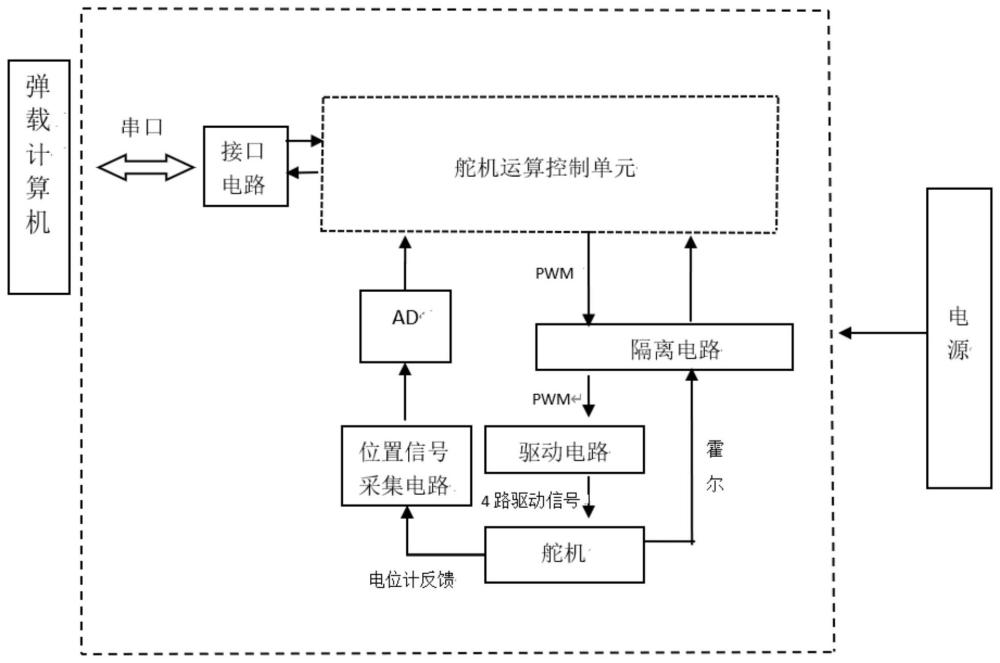
5、步骤1:电源对控舵机制系统进行供电,弹载计算机将控制信号发送至接口电路,进行信号协议的转换;
6、步骤2:接口电路将转换后的控制信号发送至舵机运算控制单元,舵机运算控制单元产生pwm信号,舵机运算控制单元将pwm信号传送至隔离电路,通过隔离电路隔离掉干扰信号后将pwm信号传递至驱动电路,驱动舵机电机转动;
7、步骤3:舵机转动后,内部电位计会产生反馈信号传送至位置信号采集电路,同时,将霍尔信号传递至舵机控制运算单元,舵机运算控制单元根据霍尔信号确定电机的换向时刻;
8、步骤4:位置信号采集电路将输入的位置信号进行滤波放大及模数转换传递至舵机运算控制单元,舵机运算控制单元再将舵偏角信号通过接口电路反馈给弹载计算机;
9、步骤5:弹载计算机收到反馈后,重新发送控制信号至接口电路,接口电路将信号传递至舵机运算控制单元,舵机运算单元再根据霍尔信号对传入信号进行计算,将产生的新信号传递至隔离电路,驱动电路继续驱动电机转动,对电机转动角度的调整,直至调整至合格角度。
10、其中,所述舵机运算控制单元包括:dsp模块以及cpld逻辑处理单元;
11、所述dsp模块用于接收弹载计算机发送的控制信号,根据控制信号产生pwm信号传输至cpld逻辑处理单元,所述cpld逻辑处理单元逻辑处理后产生多路pwm波用于驱动舵机工作。
12、其中,所述的隔离电路设有隔离芯片用于对电机转动时产生的电磁干扰进行隔离。
13、其中,所述的驱动电路采用h桥结构,通过控制场效应管六路场效应管的导通,驱动舵机电机的转动,若驱动电路的控制臂均为电低平时,电机不转,若为一高一低时,电机转动。
14、其中,所述位置信号采集电路采用电位计检测位置信号,并对电位计检测的位置信号进行滤波放大输出传送给数模转换器。
15、其中,所述接口电路包括:弹载计算机与舵控制系统的接口以及dsp程序烧写接口;
16、所述弹载计算机与舵控制系统的接口用于将弹载计算机发送的控制信号传输至舵机控制系统中;
17、所述dsp程序烧写接口用于将控制信号烧写至dsp模块中。
18、其中,所述步骤2包括以下步骤:
19、步骤21:接口电路将信号传至舵机运算控制单元,舵机运算控制单元中dsp模块产生多路pwm信号,cpld逻辑运算单元将多路pwm信号进行逻辑处理,产生4种不同的pwm信号传递至隔离电路;
20、步骤22:隔离电路将隔离干扰后的pwm信号传递至驱动电路,驱动电路根据4种不同的pwm信号的高低电平产生不同的电机旋转信号分为4路传输至舵机的电机;
21、步骤23:4套舵机根据不同的驱动信号驱动各自电机转动。
22、其中,所述步骤3中4套舵机各自的电位计反馈相应的旋转角度,传递至信号采集电路进行滤波放大及模数转换传至cpld逻辑处理单元,同时将霍尔信号传递至cpld逻辑处理单元,cpld逻辑处理单元根据霍尔信号确定电机的换向时刻。
23、(三)有益效果
24、本发明提出一种用于舵机控制系统的控制方法,实现了一个舵机控制系统对4套舵机的控制,精准的调节了舵机的转动角度,提升了导弹的精度。
技术特征:
1.一种用于舵机控制系统的控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述舵机运算控制单元包括:dsp模块以及cpld逻辑处理单元;
3.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述的隔离电路设有隔离芯片用于对电机转动时产生的电磁干扰进行隔离。
4.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述的驱动电路采用h桥结构,通过控制场效应管六路场效应管的导通,驱动舵机电机的转动,若驱动电路的控制臂均为电低平时,电机不转,若为一高一低时,电机转动。
5.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述位置信号采集电路采用电位计检测位置信号,并对电位计检测的位置信号进行滤波放大输出传送给数模转换器。
6.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述接口电路包括:弹载计算机与舵控制系统的接口以及dsp程序烧写接口;
7.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述步骤2包括以下步骤:
8.如权利要求1所述的用于舵机控制系统的控制方法,其特征在于,所述步骤3中4套舵机各自的电位计反馈相应的旋转角度,传递至信号采集电路进行滤波放大及模数转换传至cpld逻辑处理单元,同时将霍尔信号传递至cpld逻辑处理单元,cpld逻辑处理单元根据霍尔信号确定电机的换向时刻。
技术总结
本发明涉及一种用于舵机控制系统的控制方法,属于自动控制领域。本发明方法能够实现一个舵机控制系统控制四套舵机,舵机控制系统对外部信号处理及内部舵信号的反馈,实现四套舵机的精准调控,提升导弹的总体精度。
技术研发人员:肖丕英,侯肖龙,张璐,孙俊杰,芦馨瀚,王振宇,杜凤艳
受保护的技术使用者:辽沈工业集团有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!