基于改进LVS制导的无人帆船动态事件触发控制方法
本发明涉及船舶运动控制,尤其涉及一种基于改进lvs制导的无人帆船动态事件触发控制方法。
背景技术:
1、在无人帆船运动控制领域,帆结构主要用来提供前行动力,舵结构主要用来产生转船力矩。而且,在顶风和顺风局面下,帆结构无法提供充足的前向推力,因此帆船具有无法顶风和顺风航行的特点。在现有的无人帆船制导结构中,迎风、顺风和横风航行参考艏向是单独产生的,在控制器设计过程中存在不连续现象。此外,无人帆船由于帆结构的存在,在航行过程中受时变风速和风向的影响,闭环控制系统更容易发生低频抖振,特别是为保证无人帆船实时追踪到参考信号,控制输入需要频繁操舵,加快了执行器的磨损。
2、因此,常规欠驱动船路径跟踪控制算法在无人帆船直线路径跟踪控制任务中具有以下2点缺陷:
3、1)传统的ilos制导算法不能引导无人帆船在时变风向下进行路径跟踪控制任务,而且现有的无人帆船制导结构存在参考艏向信号不连续特点。
4、2)帆受风力作用下,无人帆船更易到达执行器饱和状态,影响控制系统稳定性。此外,外界时变风速风向下,无人帆船控制输入更容易发生低频抖振,增大控制命令传输负载。
技术实现思路
1、本发明提供一种基于改进lvs制导的无人帆船动态事件触发控制方法,以克服上述技术问题。
2、为了实现上述目的,本发明的技术方案是:
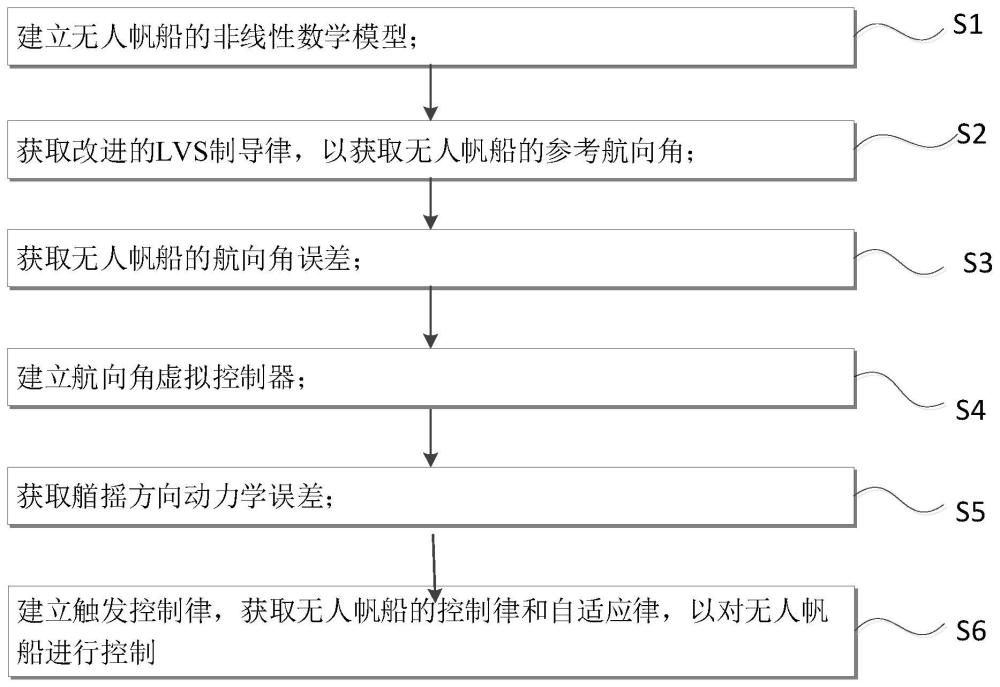
3、一种基于改进lvs制导的无人帆船动态事件触发控制方法,包括如下步骤:
4、s1:建立无人帆船的非线性数学模型;
5、s2:获取改进的lvs制导律,以获取无人帆船的参考航向角ψd;
6、s3:根据所述无人帆船的非线性数学模型和无人帆船的参考航向角ψd,获取无人帆船的航向角误差ψe;
7、s4:根据所述无人帆船的航向角误差ψe,建立航向角虚拟控制器;
8、s5:根据所述航向角虚拟控制器,获取艏摇方向动力学误差re;
9、s6:根据所述艏摇方向动力学误差re,建立触发控制律,获取无人帆船的控制律和自适应律,以对无人帆船进行控制;所述触发控制律包括舵角的触发控制律和帆角的触发控制律。
10、进一步的,所述s1中,无人帆船的非线性数学模型建立如下:
11、
12、
13、式中,η表示大地坐标系下无人帆船的运行状态向量;其中,η=[x,y,φ,ψ]t,x表示无人帆船的位置横坐标;y表示无人帆船的位置纵坐标;φ表示无人帆船的横倾角;ψ表示无人帆船的艏向角;表示求导运算;j(η)表示欧拉角坐标变换矩阵;表示附体坐标系下无人帆船的运行状态向量;其中,u表示附体坐标系下无人帆船的前进方向的速度;v表示附体坐标系下无人帆船的横漂速度;p表示附体坐标系下无人帆船的横摇角速度;r表示附体坐标系下无人帆船的艏摇角速度;m-1()表示附加质量的逆矩阵;表示额外附加质量;表示由帆、舵、龙骨以及船体造成的模型未知项;g(η)表示在给定倾侧角度下的横摇回复力矩;dwi表示海洋环境造成的附体坐标系下无人帆船的运行状态干扰力/力矩,其中,i=u,v,p,r;τ=[τu,0,τr]t表示无人帆船的控制输入力/力矩,其中,τu表示帆提供的推进力,τr表示舵提供的转船力矩;其中,m为无人帆船质量,mu表示前进方向船体附加质量;mv表示横漂方向船体附加质量;mp表示横摇方向船体附加质量;mr表示艏摇方向船体附加质量;表示前进方向附加质量系数,表示横漂方向附加质量系数,表示横摇方向附加质量系数,表示艏摇方向附加质量系数;ixx为x轴方向附加转动惯量,izz为z轴方向附加转动惯量;g(φ)=mggmtsin(φ)cos(φ),gmt表示初稳性高度;g表示重力加速度;表示前进方向船体结构不确定项;表示横漂方向船体结构不确定项;表示横摇方向船体结构不确定项;表示艏摇方向船体结构不确定项。
14、进一步的,所述s2中,获取改进的lvs制导律的获取方法如下:
15、获取横风区域的实船到横风虚拟船的参考航向角ψv如下:
16、
17、式中,xe=xr2-x2为实船到横风虚拟船的横坐标位置误差;ye=yr2-y2为实船到横风虚拟船的纵坐标位置误差,xr2为横风虚拟船的位置横坐标;x2为实船位置横坐标;yr2为横风虚拟船的位置纵坐标;y2为实船位置纵坐标;
18、将无人帆船的非线性数学模型进行简化,于是,
19、ψd=ψv (4)
20、式中:ψd表示无人帆船的参考航向角;
21、引入非横风虚拟船模型ncvs,获取直线路径期望参考艏向信号如下:
22、ψn(t)=ψtw-π·sgn(ψtw)-c(t)·χ1 (5)
23、式中:ψn(t)表示直线路径期望参考艏向信号;ψtw为ncvs的实际风向;χ1为ncvs的顶风区范围;c(t)表示当前时间点的被引入实现转向操纵的符号函数,其中,ψr为ncvs的期望航向角;dc1是距离阈值;c(t-1)表示上一时间点的被引入实现转向操纵的符号函数;
24、获取无人帆船的参考航向角ψd如下:
25、
26、式中:ψn表示直线路径航向角参考信号;θ1表示无人帆船第一次转向的角度;θ2表示无人帆船第二次转向的角度;θ3表示无人帆船第三次转向的角度;t11表示无人帆船第一次转向开始的时间;t12表示无人帆船第一次结束的时间;t21表示无人帆船第二次转向开始的时间;t22表示无人帆船第二次结束的时间;t31表示无人帆船第三次转向开始的时间;t32表示无人帆船第三次结束的时间。
27、进一步的,所述s3中,获取无人帆船的航向角误差ψe方法如下:
28、
29、进一步的,所述s4中,建立的航向角虚拟控制器如下:
30、
31、式中,αr为航向角虚拟控制器;kr为正的设计参数。
32、进一步的,,所述s5中,获取艏摇方向动力学误差re方法如下:
33、
34、式中:tr表示时间常数;βr表示航向角虚拟控制器的一阶滤波信号;βr(0)表示航向角虚拟控制器滤波信号的初始值;αr(0)表示航向角虚拟控制信号的初始值;yr是航向角的虚拟控制信号通过滤波器时形成的滤波误差;
35、令艏摇方向动力学误差re=αr-r,得
36、
37、式中,fr(·)表示无人帆船艏向模型的非线性项;fr(·)表示舵机执行器的增益函数;dwr表示艏摇方向海洋环境干扰项。
38、进一步的,所述s6中,所述舵角的触发控制律建立如下:
39、获取时变的舵角输入信号:
40、
41、式中,δr(t)表示时变的舵角输入信号;δr(tk)表示当前触发点下的舵角输入信号;tk表示当前触发点时间;tk+1表示下一触发点时间;
42、所述舵角的触发控制律为:
43、
44、式中,为舵角触发误差;为舵角触发阈值参数h1是舵角动态阈值参数,h2是舵角静态阈值参数,是舵角常数参数。
45、进一步的,所述s6中,所述无人帆船的控制律和自适应律获取方法如下:
46、获取舵角执行器的控制信号如下:
47、
48、式中,表示舵角输入信号大于等于0时的触发范围界定参数;表示舵角输入信号小于0时的触发范围界定参数;
49、获取无人帆船的控制律δr(tk)和自适应律如下:
50、
51、式中,δr(tk)为无人帆船的舵角控制律;为的估计值;表示舵角学习参数;αn表示设计的中间控制律;kn表示控制器参数,krn表示鲁棒神经阻尼参数,z表示鲁棒神经阻尼项;是大于零的第一自适应参数;σn是大于零的第二自适应参数;表示学习参数的初始值;
52、进一步的,所述s6中,所述帆角的触发控制律建立如下:
53、
54、式中,δs(t)表示时变的帆角输入信号;δs(tk)表示当前触发点下的帆角输入信号;tk表示当前触发点时间;tk+1表示下一触发点时间;
55、所述帆角的触发控制律为:
56、
57、式中,帆角触发阈值参数ι1是帆角动态阈值参数,ι2是帆角静态阈值参数,是帆角常数参数。
58、有益效果:本发明的一种基于改进lvs制导的无人帆船动态事件触发控制方法,通过改进的lvs制导律,解决了无人帆船制导结构存在参考艏向信号不连续特点,同时设计的事件触发控制律,能够在横风和非横风航行状态下实现良好的跟踪效果,且在转向点处,帆船能够沿着平缓的弧形路径航行。能够实现时变风向下无人帆船有效执行路径跟踪控制任务。此外,动态事件触发技术还能够降低受外界扰动引起的控制输入频繁抖振现象,提高了控制算法的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!