一种应对多源通讯延迟的智能网联车队自适应控制方法
本发明属于智能网联汽车,具体涉及一种应对多源通讯延迟的智能网联车队自适应控制方法。
背景技术:
1、
2、相较传统汽车的机械控制设备,智能网联汽车的运行更加有赖于数据与通讯环境,特别是对通讯结构、传输稳定性要求很高。但是,受限于物理传输特性,当车间网联通讯的距离超过一定范围或存在障碍物遮蔽时,就会不可避免地导致车间网联通讯存在不同程度的通讯延迟。在实际的道路环境中,车联网通讯也面临着各种不利因素的影响,包括极端恶劣的天气条件、车载通讯设备老化、地理位置、信号干扰甚至恶意网络攻击等。这些内外部因素都会导致车联网通讯延迟和丢包率增加,对智能网联交通流的运行产生多种不利影响。此外,随着车联网通讯的深入发展,车辆间的通讯会进一步拓展,即车辆可以和其前方多辆车辆通讯,此时如果不同车辆之间通讯的延迟不同,情况就会变的非常复杂:只要没有接收到完整的数据,车辆就需要做出选择,是更新状态还是继续等待数据。即,是基于已经收到的数据进行车辆运行状态的更新,还是等待收到全部完整的数据后再进行车辆状态更新。不同的选择代表了不同的车辆状态更新方法,也必然导致不同的交通系统运行结果。
3、随着汽车产业逐渐迈向智能、互联、自动驾驶的时代,多源通讯延迟已成为制约其发展的关键因素,并且现有研究中缺乏对车辆状态更新方法的制定和车辆自适应控制的探索。因此,亟需一种应对多源通讯延迟的智能网联车队自适应控制方法,可为目前的车联网通讯与自动驾驶策略的优化改善提供理论技术支持,利于进一步推动我国智能网联汽车技术水平的发展。
技术实现思路
1、发明目的:针对现有技术中存在的问题,本发明提出了一种应对多源通讯延迟的智能网联车队自适应控制方法,在云平台中预先设定五种车辆状态更新方法,采用打分机制构建安全综合评价指标,通过数值仿真获得不同多源通讯延迟场景下的车辆状态数据和所对应的车辆状态更新方法,以此构建云平台数据库,现实环境中的协同自适应巡航控制车辆通过车端-云端通讯技术将车辆状态数据包传输至云平台,进行安全评价指标比对,若存在安全风险,车辆将根据云平台所提供的数据进行策略自适应调整。
2、为了实现上述目的,本发明的技术方案如下:一种应对多源通讯延迟的智能网联车队自适应控制方法,包括如下步骤:
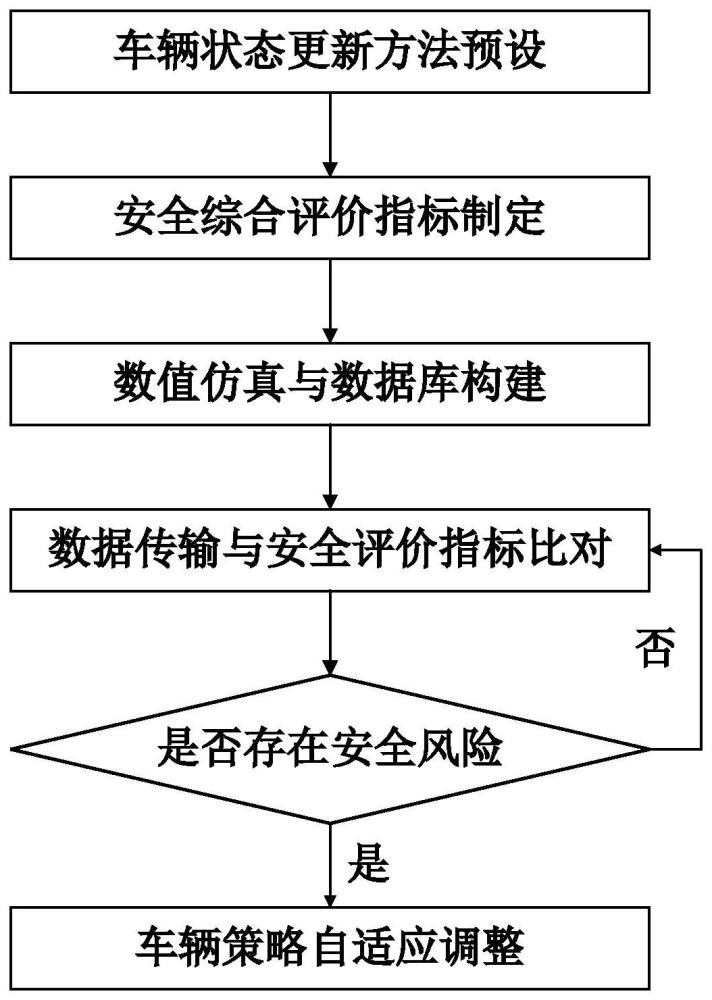
3、步骤a.车辆状态更新方法预设:在云平台中输入预先设定的五种车辆状态更新方法;
4、步骤b.安全综合评价指标制定:选取积分碰撞时间(time integrated time-to-collision,tit)、累计碰撞时间(time exposed time-to-collision,tet)、车速标准差系数λp来构建安全综合评价指标esafety,以实现不同多源通讯延迟场景下的车辆状态更新方法对比;
5、步骤c.数值仿真与数据库构建:采用不同的通讯环境参数来构建多源通讯延迟场景,选用多前车信息反馈的通讯拓扑结构,通过数值仿真得到不同多源通讯延迟场景下,对应仿真时刻tf时同一车队中车辆i的速度加速度两车之间的距离推荐的车辆状态更新方法,与所对应的通讯环境参数同时存入云平台数据库中;
6、其中,通讯环境参数包括丢包率ploss、通讯传输延迟τcacc、车队中头车的速度vlead和加速度alead;多前车信息反馈的通讯拓扑结构为目标车辆与其所处智能网联车队中的所有前方车辆均进行车辆信息流传递的通讯拓扑结构;f代表数值仿真;
7、步骤d.数据传输与安全评价指标比对:所有协同自适应巡航控制车辆选用多前车信息反馈的通讯拓扑结构,并按预设时间间隔△t将自身的车辆状态数据包通过车端-云端通讯技术传输至云平台,云平台通过各支车队所对应车辆的状态数据包,计算该车队的安全综合评价指标esafety,若esafety≤β,则判定为存在安全风险,需要将车队的车辆状态数据包与步骤c中得到的云平台数据库进行比对,得到该车队所对应的多源通讯延迟场景并给出推荐的车辆状态更新方法,进入步骤e;否则判定不存在安全风险,重新循环步骤d;
8、其中,本发明中的协同自适应巡航控制车辆属于level 2级别的智能网联汽车;时间间隔△t∈{10ms,20ms,50ms,100ms};β为安全指标预警阈值;车辆状态数据包具体包括:数据采集时刻tcollect、目标车辆ci的速度目标车辆ci的加速度目标车辆ci的纵向位置ci为目标车辆编号;r代表真实数据;
9、步骤e.车辆策略自适应调整:路段中的所有协同自适应巡航控制车辆再通过车端-云端通讯技术接收来自云平台的本车队所对应的推荐车辆状态更新方法、多源通讯延迟场景以及对应的通讯环境参数,进行车辆状态更新方法的自适应调整。
10、优选地,步骤a中,所述车辆状态更新方法包括1)更新方法1:在当前时刻tg下,目标车辆只有收到在当前时刻tg下全部连接前车的车辆状态数据包,才能进行车辆状态更新;2)更新方法2:目标车辆会等待直到收到全部连接前车的车辆状态数据包后,才会进行车辆状态更新。与更新方法1有所区别的是,倘若当前时刻tg的前车的车辆状态数据包不可获取,采用的是最邻近当前时刻tg的最新数据包,且数据包一旦被使用,就会被清除,不会再被调用;3)更新方法3:由于紧邻前车的状态数据包对目标车辆影响最大,只有当目标车辆收到紧邻前车的状态数据包之后,目标车辆才会基于当前时刻tg下已经收到的数据包进行车辆运行状态的更新,但在接收到紧邻前车的状态数据包之后,上一个时间步所用的所有前车数据都将清除,不再调用;4)更新方法4:与更新方法3类似,只有当目标车辆收到紧邻前车的状态数据包之后,目标车辆才会基于当前时刻tg下已经收到的数据包进行车辆运行状态的更新,但与更新方法3有所区别的是,在接收到紧邻前车的状态数据包之后,不进行数据清除,采取车辆数据替换的模式,即目标车辆收到一个数据后,将该数据数据包替换掉上一次收到的对应前车的状态数据包;5)更新方法5:协同自适应巡航控制车辆主动降级为自适应巡航控制车辆,其中,自适应巡航控制车辆为通过车载传感器完成数据采集的车辆。
11、优选地,步骤b中,构建安全综合评价指标esafety,具体包括如下步骤:
12、步骤b1)计算tit和tet,具体公式如下:
13、
14、
15、
16、
17、其中,ttcn(t)为在时刻t下目标车辆n相对于其前车n-1的碰撞时间;xn-1(t),xn(t)分别为时刻t下车辆n-1和车辆n的纵向位置;l为车辆长度;vn-1(t),vn(t)分别为时刻t下车辆n-1和车辆n的速度;t为时间间隔;n为智能网联车队内的车辆总数;n为车辆编号;δn(t)为车辆n在时间t处的切换变量;ttc*为碰撞时间阈值;
18、步骤b2)计算车速标准差系数λp,具体公式如下:
19、
20、
21、其中,为车辆n速度的标准差;为车辆n的平均速度;为在时刻t下车辆n的速度;
22、步骤b3)计算安全综合评价指标esafety,具体过程如下:
23、步骤b31)设定指标的阈值范围:为每个安全指标,设定不同的阈值范围并对应设置得分:(得分=10分),(得分=8分),(得分=6分),(得分=4分),(得分=2分),(得分=0分),其中,i∈{tit,tet,λp};分别为i指标的1、2、3、4、5级阈值;
24、步骤b32)映射到阈值范围:将计算出的不同指标实际值映射到对应的阈值范围内;
25、步骤b33)计算得分:根据每个指标所映射到的阈值范围,为对应的指标计算得分;
26、步骤b34)计算安全综合评价指标esafety,具体公式如下:
27、
28、其中,scoretit为智能网联车队的tit得分;scoretet为智能网联车队的tet得分;为智能网联车队的λp得分;a为scoretit的权重系数;b为scoretet的权重系数;c为的权重系数。
29、优选地,步骤d中,车队的车辆状态数据包与步骤c中得到的云平台数据库进行比对,得到该车队所对应的多源通讯延迟场景并给出推荐的车辆状态更新方法,具体包括如下步骤:
30、步骤d1)用真实环境里从开始的智能网联车队中头车的速度和加速度与云平台数据库里从开始的车队头车数据一一比对,直至真实环境与云平台数据库之间的速度差和加速度差不大于βv和βa,即且调出所对应的云平台数据库中的智能网联车队数据,其中,为真实环境里的从第一次发生esafety≤β时往前推直至当tit或tet为0的时刻;为数值仿真里的从第一次发生esafety≤β时刻往前推直至当tit或tet为0的时刻;βv为真实环境与云平台数据库之间的速度差允许值;βa为真实环境与云平台数据库之间的加速度差允许值;分别代表真实环境与云平台数据库中的头车速度;分别代表真实环境与云平台数据库中的头车加速度;
31、步骤d2)用智能网联车队中每辆车的速度、加速度、两车间距与步骤d1中调出的云平台数据库中的智能网联车队数据比对,具体比对过程如下:
32、步骤d21)通过变更丢包率ploss、通讯传输延迟τcacc,分别调出不同通讯环境下的智能网联车队数据,并计算所对应的比对相对误差βcompare,具体计算公式为:
33、
34、其中,nc为智能网联车队的车辆数;tc为时刻;ic为车队中的车辆编号;为云平台数据库中的车辆ic在时刻下的速度;为真实环境中的车辆ic在时刻下的速度;为云平台数据库中的车辆ic在时刻下的加速度;真实环境中的车辆时刻下的加速度;为云平台数据库中的车辆ic在时刻下的与紧邻前车的间距;为真实环境中的车辆ic在时刻下的与紧邻前车的间距;
35、步骤d22)通过计算不同通讯环境下所计算出的βcompare,当βcompare<=βmax时,调出对应云平台数据库中的智能网联车队数据、通讯环境参数和所对应的车辆状态更新方法,并以通讯环境参数和所对应的车辆状态更新方法作为最终输出,其中,βmax为比对相对误差容许值。
36、本发明采用上述技术方案,具有以下有益效果:
37、本发明提出一种应对多源通讯延迟的智能网联车队自适应控制方法,预先设定并详细描述了车辆状态更新方法,可为当前的车联网通讯与自动驾驶策略的优化改善提供理论技术支持,并通过打分机制从多维角度构建安全综合评价指标,以保障评价体系的科学化、合理化。选取不同的通讯环境参数来构建多源通讯延迟场景,通过数值仿真获得不同多源通讯延迟场景下的车辆状态数据和所对应的车辆状态更新方法,以此来构建云平台数据库,为后续与真实场景的车辆数据对比提供基础支撑。通过车端-云端通讯技术传输实现实时的真实数据采集,且设定了一定的数据比对冗余,保障了车队安全风险判定的准确性。面对多源通讯延迟的出现,云平台通过车端-云端通讯技术向车队中的车辆发送所对应的推荐车辆状态更新方法、多源通讯延迟场景,以完成车辆策略的自适应调整,有效保障了驾乘人员的安全,降低了道路交通事故的发生概率,显著改善多前车信息反馈的通讯拓扑结构下的智能网联交通系统的鲁棒性、稳定性、安全性和运行效率。在多源通讯延迟场景已成为一种常态的背景下,本发明具备很强的实践意义和现实启示。
- 还没有人留言评论。精彩留言会获得点赞!