基于AGV的运动控制方法和装置与流程
本发明涉及自动化,尤其涉及一种基于agv的运动控制方法和装置。
背景技术:
1、在已有技术中,agv(自动引导载具,可理解为自动完成各种任务的运输用载具)的运动控制采用原地转弯进行行驶方向调整的方式实现,会对地面造成损伤,同时效率会更差;并且,mpc算法参数复杂,后期维护难度很大,尤其对于原地转弯等特殊行驶场景下,控制精度和效率较差。
技术实现思路
1、本发明提供一种基于agv的运动控制方法和装置,以期解决现有技术中,agv运动控制精度和效率较差的技术问题。
2、本发明提供一种基于agv的运动控制方法,所述方法包括:
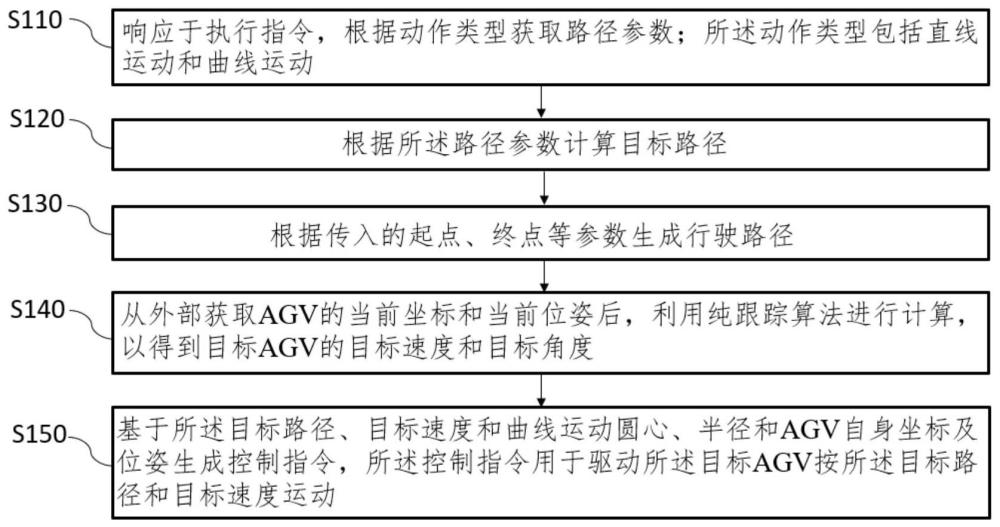
3、响应于执行指令,根据动作类型获取路径参数;所述动作类型包括直线运动和曲线运动;
4、根据所述路径参数计算目标路径;
5、根据传入的起点、终点等参数生成行驶路径;
6、从外部获取agv的当前坐标和当前位姿后,利用纯跟踪算法进行计算,以得到目标agv的目标速度和目标角度;
7、基于所述目标路径、目标速度和曲线运动圆心、半径和agv自身坐标及位姿生成控制指令,所述控制指令用于驱动所述目标agv按所述目标路径和目标速度运动。
8、在一些实施例中,基于所述目标路径、速度和角度生成控制指令,之后还包括:
9、从外部获取目标agv运动后的当前坐标;
10、基于预设的外部变量函数进行计算,以得到目标点;
11、判定所述目标agv运动后的位置达到所述目标点,则结束所述控制方法。
12、在一些实施例中,根据所述路径参数计算目标路径,具体包括:
13、从外部获取目标agv的当前坐标及位姿;
14、判定当前转向角度正确的情况下,则计算垂点距离和车身姿态;
15、根据所述垂点距离和车身姿态,计算预瞄点和转弯角度;
16、对所述转弯角度进行限制,并根据运行距离、剩余距离进行速度变换。
17、在一些实施例中,对所述转弯角度进行限制,并根据运行距离、剩余距离进行速度变换,之后还包括:
18、连续判断剩余距离与预设剩余距离的关系;
19、在剩余距离均小于相应的预设剩余距离的情况下,则判断目标agv运动后的位置是否达到目标点;
20、判定所述目标agv运动后的位置达到所述目标点,则结束所述控制方法。
21、在一些实施例中,根据所述路径参数计算目标路径,具体包括:
22、通过上位机给出的路径起点坐标、终点坐标、曲线路径特有的圆弧圆心及半径,自动生成agv运动路径,其中直线路径说从起点指向终点的线段;曲线路径则是由上述参数创建贝塞尔曲线从外部获取agv的当前坐标及位姿;
23、计算最近路径点、垂足点、垂直距离、当前点与目标点的横向距离及在圆心处形成的夹角、当前点到圆心距离;
24、根据垂直距离和车身姿态计算得到误差角度,计算预瞄点;
25、对预瞄点进行修正,防止出现点位异常的情况;
26、根据预瞄点及各项参数,计算舵轮的目标转向角度;
27、根据agv自身情况,对所述转弯角度进行上下限限制。
28、在一些实施例中,利用所述目标转向角度对所述转弯角度进行限制,之后还包括:
29、若选择曲线行驶,则在所述转弯角度与所述目标转向角度的偏差小于预设值的情况下,则确定目标agv到达目标点;
30、若选择直线行驶,则根据当前点到终点的距离判断,当小于预设值时,确定agv到达目标点。
31、本发明还提供一种基于agv的运动控制装置,所述装置包括:
32、参数获取单元,用于响应于执行指令,根据动作类型获取路径参数;所述动作类型包括直线运动和曲线运动;
33、路径计算单元,用于根据所述路径参数计算目标路径;
34、第一目标生成单元,根据传入的起点、终点等参数生成行驶路径;
35、第二目标生成单元,用于从外部获取agv的当前坐标和当前位姿后,利用纯跟踪算法进行计算,以得到目标agv的目标速度和目标角度;
36、指令生成单元,用于基于所述目标路径、目标速度和曲线运动圆心、半径和agv自身坐标及位姿生成控制指令,所述控制指令用于驱动所述目标agv按所述目标路径和目标速度运动。
37、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述的方法。
38、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的方法。
39、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上所述的方法。
40、本发明提供的基于agv的运动控制方法和装置,通过响应于执行指令,根据动作类型获取路径参数;所述动作类型包括直线运动和曲线运动;根据所述路径参数计算目标路径;根据传入的起点、终点等参数生成行驶路径;从外部获取agv的当前坐标和当前位姿后,利用纯跟踪算法进行计算,以得到目标agv的目标速度和目标角度;基于所述目标路径、目标速度和曲线运动圆心、半径和agv自身坐标及位姿生成控制指令,所述控制指令用于驱动所述目标agv按所述目标路径和目标速度运动。从而解决了现有技术中,agv运动控制精度和效率较差的技术问题。
技术特征:
1.一种基于agv的运动控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于agv的运动控制方法,其特征在于,基于所述目标路径、目标速度和曲线运动圆心、半径和agv自身坐标及位姿生成控制指令,之后还包括:
3.根据权利要求1所述的基于agv的运动控制方法,其特征在于,根据所述路径参数计算目标路径,具体包括:
4.根据权利要求3所述的基于agv的运动控制方法,其特征在于,对所述转弯角度进行限制,并根据运行距离、剩余距离进行速度变换,之后还包括:
5.根据权利要求1所述的基于agv的运动控制方法,其特征在于,根据所述路径参数计算目标路径,具体包括:
6.根据权利要求5所述的基于agv的运动控制方法,其特征在于,利用所述目标转向角度对所述转弯角度进行限制,之后还包括:
7.一种基于agv的运动控制装置,其特征在于,所述装置包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的方法。
技术总结
本发明提供了一种基于AGV的运动控制方法和装置,所述方法包括:响应于执行指令,根据动作类型获取路径参数;所述动作类型包括直线运动和曲线运动;根据所述路径参数计算目标路径;根据传入的起点、终点等参数生成行驶路径;从外部获取AGV的当前坐标和当前位姿后,利用纯跟踪算法进行计算,以得到目标AGV的目标速度和目标角度;基于所述目标路径、目标速度和曲线运动圆心、半径和AGV自身坐标及位姿生成控制指令,所述控制指令用于驱动所述目标AGV按所述目标路径和目标速度运动。解决了现有技术中,AGV运动控制精度和效率较差的技术问题。
技术研发人员:苑韶伦,罗冠文,李明涛
受保护的技术使用者:北京诚益通控制工程科技股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!