合作目标航天器交会对接地面试验系统及方法与流程
本发明涉及空间交会对接地面试验领域,特别涉及一种合作目标航天器交会对接地面试验系统及方法。
背景技术:
1、空间交会对接是指两个飞行器在空间轨道上按预定时间和预定位置会合并在机械结构上连接成一个整体的技术。随着我国空间站逐步完成建设和在轨服务技术的不断发展,空间交会对接技术作为一项关键技术的稳定性显得越来越重要。交会对接技术的导航敏感器通常采用合作目标测量技术,即在目标航天器上事先布置了标志点,以供可见光相机或者激光雷达等导航敏感器进行识别与测量。
2、由于交会对接技术十分复杂,在研制过程中,地面仿真验证是一个非常重要的环节。目前地面仿真验证主要有三种手段,第一是以气浮台为基础的全物理仿真,第二是以多自由度运动模拟器为基础的半物理仿真,第三种为数学仿真技术,三种技术各有优劣互为补充。在地面试验验证中,一方面是要验证导航敏感器的测量性能,另一方面考验控制分系统的导航与控制算法的有效性以及鲁棒性。
3、飞行器对合作目标交会对接的过程中需要将交会对接单机相对位置、相对姿态、视线距、视线角引入控制系统的闭环中。交会对接单机需要测量真实合作靶标才能输出测量数据,但是gnc半物理仿真系统无法提供单机与靶标的准确相对运动,而一般采用数字仿真来模拟单机测量数据进行gnc系统导航与控制算法的验证,采用图像模拟器来验证单机测量算法的功能。数字仿真模型无法完全模拟单机的测量误差,且图像模拟器只能验证单机的电子学及算法部分,无法验证光学部分及探测器性能。
技术实现思路
1、针对现有技术的不足,本发明提供一种合作目标航天器交会对接地面试验系统及方法,可以将交会对接单机测量合作靶标的实测数据实时接入控制系统的闭环测试。
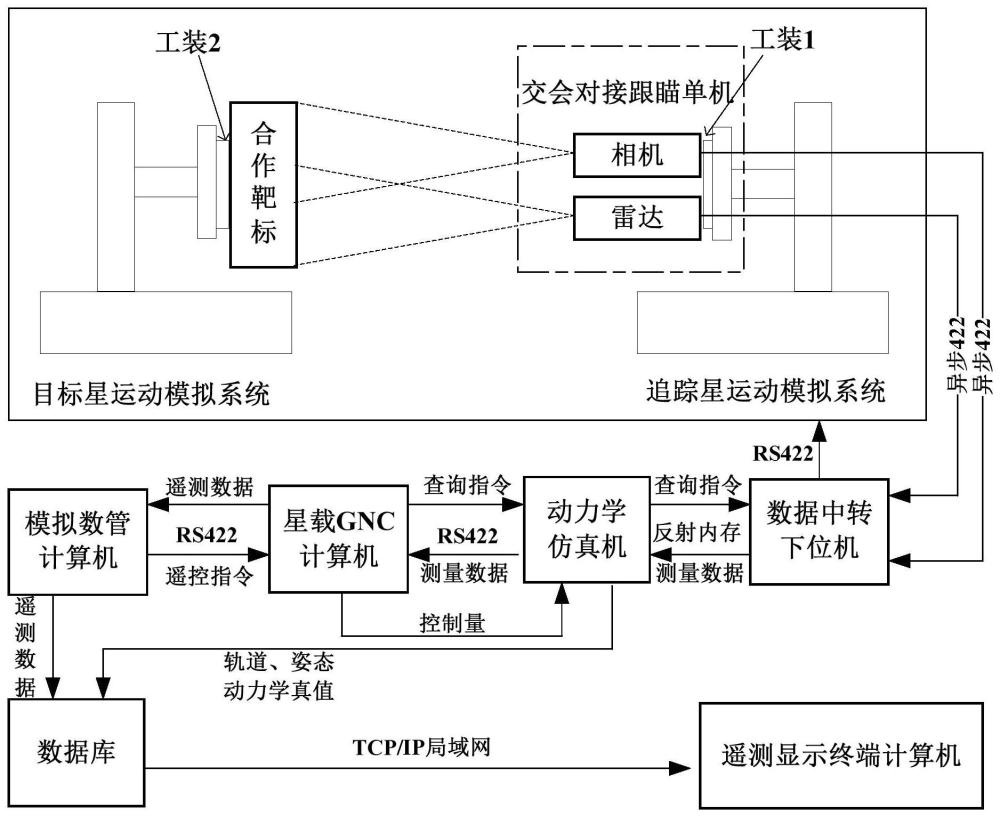
2、本发明的一个技术方案在于提供一种合作目标航天器交会对接地面试验系统,其包含:交会对接跟瞄单机、合作靶标、目标星运动模拟系统、追踪星运动模拟系统、数据中转下位机、星载gnc计算机、动力学仿真机;
3、所述动力学仿真机用于模拟飞行器的轨道动力学和姿态动力学,将飞行器与合作目标的相对位置和相对姿态信息发送给数据中转下位机;
4、在所述数据中转下位机输出数据的驱动下,所述目标星运动模拟系统和追踪星运动模拟系统用于模拟两星在空间中的相对位置和姿态运动;
5、所述交会对接跟瞄单机安装在追踪星运动模拟系统上;所述合作靶标安装在目标星运动模拟系统上;所述交会对接跟瞄单机用于获取合作靶标的图像数据,并将对图像数据解算得到的测量数据发送给数据中转下位机;
6、所述动力学仿真机还用于将数据中转下位机转发的测量数据,传输给星载gnc计算机;所述星载gnc计算机运行导航制导与控制算法,根据收到的测量数据生成控制量并发送给动力学仿真机,形成合作目标航天器交会对接工况的控制闭环。
7、可选地,所述交会对接跟瞄单机包括光学相机和激光雷达;
8、所述合作靶标包括光学相机标志灯和激光雷达靶标,分别作为所述光学相机和激光雷达的测量目标。
9、可选地,所述目标星运动模拟系统和追踪星运动模拟系统,由两个六自由度运动模拟系统组合形成。
10、可选地,根据飞行器上光学相机和激光雷达的实际安装位置,将本试验系统的光学相机和激光雷达通过第一工装安装到所述追踪星运动模拟系统的转盘上;根据目标星上合作靶标的实际安装位置,将本试验系统的合作标靶通过第二工装安装到目标星运动模拟系统的转盘上。
11、可选地,所述数据中转下位机的反射内存卡,和所述动力学仿真机的反射内存卡通过双模光纤互相连接,用于数据收发。
12、可选地,所述数据中转下位机将收到的测量数据,通过反射内存卡写入固定内存地址,供所述动力学仿真机的反射内存卡读取;
13、所述动力学仿真机对交会对接工况的飞行器绝对及相对位置、姿态进行建模,并通过反射内存卡将相对位置和姿态写入固定内存地址,供所述数据中转下位机的反射内存卡读取。
14、可选地,所述数据中转下位机设有与光学相机和激光雷达分别连接的rs422接口,用于向光学相机和激光雷达转发由所述星载gnc计算机输出的遥测查询指令,和接收光学相机和激光雷达输出的测量数据;
15、所述数据中转下位机设有连接所述目标星运动模拟系统和追踪星运动模拟系统的rs422接口,用于向所述目标星运动模拟系统和追踪星运动模拟系统发送驱动用的数据;
16、所述动力学仿真机设有连接所述星载gnc计算机的rs422接口,用于接收所述星载gnc计算机输出的控制量。
17、可选地,所述光学相机和激光雷达输出的测量数据包含相对于合作靶标的相对位置、相对姿态、视线距、方位角、俯仰角信息。
18、可选地,所述的一种合作目标航天器交会对接地面试验系统,还包含模拟数管计算机、数据库;所述模拟数管计算机用于发送遥控指令,使所述星载gnc计算机进入交会对接流程;所述数据库用于接收动力学仿真机发送的轨道和姿态动力学真值,和所述模拟数管计算机发送的遥测数据。
19、本发明的另一个技术方案在于提供一种合作目标航天器交会对接地面试验方法,其包含以下步骤:
20、s1、搭建上述任意一项合作目标航天器交会对接地面试验系统;
21、s2、动力学仿真机建立飞行器与合作目标的轨道动力学和姿态动力学,产生飞行器与合作标靶的相对位置和相对姿态数据发给数据中转下位机,用于驱动目标星运动模拟系统和追踪星运动模拟系统;
22、s3、数据中转下位机获得交会对接跟瞄单机发出的测量数据,通过动力学仿真机传输给星载gnc计算机;
23、s4、星载gnc计算机根据测量数据解算得到的控制量,传输给动力学仿真机作用于轨道动力学和姿态动力学;
24、重复步骤s2-s4的过程形成控制闭环,完成交会对接工况全过程。
25、可选地,步骤s4的对接完成后,进一步进行步骤s5;
26、所述步骤s5包含分析遥测数据,评估航天器交会对接末端控制精度;其中,以动力学仿真机输出的对接口坐标系下的飞行器与目标的相对姿态、相对位置和相对速度为真值;将星载gnc计算机输出的基于目标姿态确定的相对姿态,基于相对导航输出的相对位置和相对速度与真值比较,评价交会对接过程中目标姿态确定的精度和相对导航的精度,并评价对接末端的控制精度。
27、可选地,所述步骤s5还包含评估交会对接单机的测量性能;其中,将目标星和追踪星运动模拟系统输出的第一工装安装端面到第二工装安装端面的相对位置和相对姿态转换到交会对接单机测量系下作为真值;将交会对接单机输出的单机测量系的对靶标的相对位置、相对姿态与真值作比较,评价单机测量精度。
28、本发明的一种合作目标航天器交会对接地面试验系统及方法中,将交会对接跟瞄单机、合作靶标分别安装到目标星和追踪星运动模拟系统上;数据中转下位机使用动力学仿真机生成的目标星与追踪星的相对位置、相对姿态数据来驱动运动模拟系统,合作靶标和交会对接跟瞄单机产生相对位置、姿态运动;交会对接跟瞄单机测量合作靶标,输出与目标的视线角、视线距、相对位置、相对姿态等数据给数据中转下位机;数据中转下位机将rs422接口收到的数据通过反射内存卡传输给动力学仿真机;动力学仿真机将反射内存卡收到的数据转换成rs422接口传输给星载gnc计算机;星载gnc计算机根据收到的相对位置、姿态信息生成控制指令给动力学仿真机形成合作目标航天器交会对接工况的控制闭环;在对接完成后,评估航天器交会对接末端控制精度和交会对接单机的测量性能。
29、现有技术大致存在三个问题:现有gnc半物理仿真系统采用数字仿真单机模型无法完全模拟单机的测量误差,使得半物理仿真不够真实,使得gnc分系统导航与控制算法的性能验证不充分;跟瞄单机需要测量合作靶标才能输出测量数据,一般半物理仿真中无法提供相对运动试验条件,无法验证交会对接单机真实测量性能;运动模拟系统与半物理系统空间位置间隔较远,用rs422接口无法进行远距离数据传输。
30、本发明可以将双六自由度运动模拟装置与gnc半物理试验系统结合。与现有技术相比,本发明的有益效果在于:利用目标星和追踪星运动模拟系统实现跟瞄单机与合作靶标的空间相对运动,对单机的测量性能进行有效的验证;将单机真实测量数据接入控制系统闭环,对交会对接工况下导航与控制算法的性能及鲁棒性进行充分的测试,提高了半物理仿真的真实度;同时通过数据中转下位机将rs422接口转换成反射内存接口,利用双模光纤实现了数据的远距离、低延时传输。本发明可用于合作目标航天器交会对接控制的地面半物理闭环试验,为在轨交会对接地面验证提供技术支撑。
- 还没有人留言评论。精彩留言会获得点赞!