一种基于事件触发通信的多无人机编队控制方法及装置
本技术涉及无人机,尤其涉及一种基于事件触发通信的多无人机编队控制方法及装置。
背景技术:
1、多无人机系统执行编队任务时,需要一个有效可靠的通信网络实现信息交互、任务规划和协同控制,以充分发挥多机协作优势。分布式通信架构的主要思想是使得编队无人机根据预设的通信架构,只与编队中相关联的无人机进行信息通信,主要特点是编队中没有控制中心,每个无人机地位平等且具有一定程度的自主控制和决策能力。因此,全局编队控制任务可以被分解为多个子任务,无人机根据邻居节点状态信息、对应的分解任务独立计算控制指令,通过协同合作完成编队任务,极大地降低了计算和通信成本。分布式结构使无人机群体不再依赖于一个统一的信息控制中心,每架无人机都可以与附近的无人机临时联网,任何一架无人机的故障或损坏都不会影响整个编队的运行,所以整个系统具有一定的容错性、鲁棒性和灵活性。
2、然而,在实际应用中很难满足无人机之间连续通信的要求。因此,在数字实现过程中,往往采用时间驱动的周期性通信策略。但在考虑有限的通信信道容量时,高效利用通信资源变得非常必要和现实,而为了解决周期性通信策略存在的冗余通信问题,一些相关研究提出了事件触发通信策略,在该策略中,无人机之间的通信不是在预定义的时刻执行,而是在系统需要时执行。这意味着它是一种资源高效利用的解决方案,可以有效提高通信效率、缓解网络拥塞。得益于这一优势,事件触发通信已被广泛用于各种控制问题。该通信策略的核心是如何设计通信触发条件,确定应在何时更新无人机的状态信息。通信触发条件的设计往往与事件触发测量误差、触发阈值有关。
3、目前的通信触发条件往往被定义为恒定的触发阈值。只有当事件触发测量误差超过可容忍的阈值时,才会触发通信。因此,触发阈值与通过网络传输的数据速率密切相关。例如,如果选择较大的阈值,将会产生更长的事件间隔时间,从而减少传输的数据包数量。然而,在实际应用中,仅仅使用恒定触发阈值可能不太合理。例如,在无人机编队过程中,需要频繁通信才能快速收敛到期望队形。但是,一旦编队完成,只需要间歇性通信来维持编队稳定。如果仍然使用恒定触发阈值,很难满足根据系统实时状态变化的通信需求。
技术实现思路
1、本技术提供了一种基于事件触发通信的多无人机编队控制方法及装置,用于解决现有的基于事件触发通信的多无人机编队控制事件通信触发条件灵活性低,难以满足目前多无人机系统的编队控制通信需求的技术问题。
2、为解决上述技术问题,本技术第一方面提供了基于事件触发通信的多无人机编队控制方法,包括:
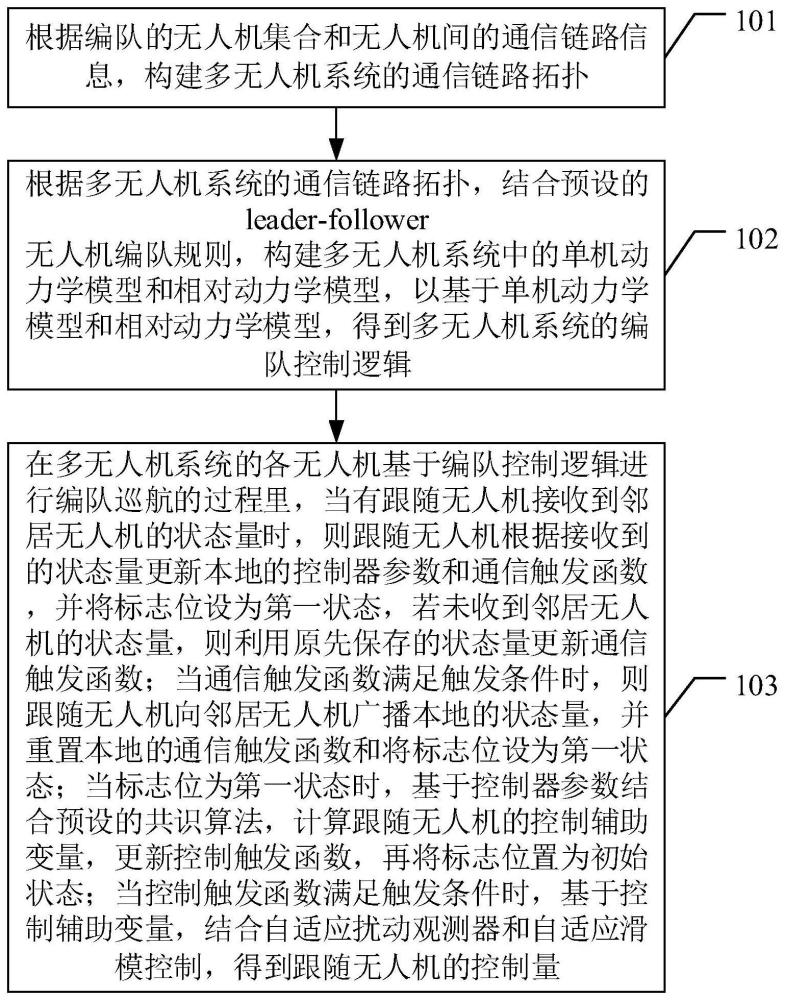
3、根据编队的无人机集合和无人机间的通信链路信息,构建多无人机系统的通信链路拓扑;
4、根据所述多无人机系统的通信链路拓扑,结合预设的leader-follower无人机编队规则,构建所述多无人机系统中的单机动力学模型和相对动力学模型,以基于所述单机动力学模型和所述相对动力学模型,得到所述多无人机系统的编队控制逻辑,其中,所述单机动力学模型代表的是任一无人机的动力学模型,所述相对动力学模型代表的是任一跟随无人机与领航无人机的相对动力学模型;
5、在所述多无人机系统的各无人机基于所述编队控制逻辑进行编队巡航的过程里,当有跟随无人机接收到邻居无人机的状态量时,则所述跟随无人机根据接收到的状态量更新本地的控制器参数和通信触发函数,并将标志位设为第一状态,若未收到邻居无人机的状态量,则利用原先保存的状态量更新通信触发函数;当所述通信触发函数满足触发条件时,则所述跟随无人机向邻居无人机广播本地的状态量,并重置本地的通信触发函数和将标志位设为第一状态;当所述标志位为第一状态时,基于所述控制器参数结合预设的共识算法,计算所述跟随无人机的控制辅助变量,更新控制触发函数,再将所述标志位置为初始状态;当所述控制触发函数满足触发条件时,基于所述控制辅助变量,结合自适应扰动观测器和自适应滑模控制,得到所述跟随无人机的控制量。
6、优选地,所述控制器参数具体包括:位置测量误差、速度测量误差、触发频率影响参数、组合位置影响参数和组合速度影响参数。
7、优选地,所述通信触发函数具体为:
8、
9、2aγ2-b>0
10、
11、式中,式中,h为对称正定矩阵,a是矩阵h非0最小特征值,in是n维的单位矩阵,η为触发频率影响参数、β为组合位置影响参数。β为组合速度影响参数,为跟随无人机i的位置测量误差,为跟随无人机i的速度测量误差,代表跟随无人机i的组合未知状态,代表跟随无人机i的组合速度状态,为领航无人机的位置测量误差,为领航无人机的速度测量误差,代表跟随无人机i的通信触发时刻序列的第k个时刻。
12、优选地,所述控制辅助变量的计算式具体为:
13、
14、式中,qi(t)为跟随无人机i的控制辅助变量,β为组合位置影响参数,γ为组合速度影响参数,代表跟随无人机i的组合未知状态,代表跟随无人机i的组合速度状态,代表跟随无人机i的通信触发时刻序列的第k个时刻。
15、优选地,所述控制量的计算式具体为:
16、
17、式中,为跟随无人机i的控制辅助变量,代表跟随无人机i的通信触发时刻序列的第k个时刻,为跟随无人机i的自适应开关增益参数,为跟随无人机i的滑模面,为跟随无人机i的扰动观测值,λ为自定义增益矩阵,所述自定义增益矩阵为对角矩阵且每个元素均为正数。
18、本技术第二方面提供了一种基于事件触发通信的多无人机编队控制装置,包括:
19、通信链路拓扑构建单元,用于根据编队的无人机集合和无人机间的通信链路信息,构建多无人机系统的通信链路拓扑;
20、编队控制逻辑建立单元,用于根据所述多无人机系统的通信链路拓扑,结合预设的leader-follower无人机编队规则,构建所述多无人机系统中的单机动力学模型和相对动力学模型,以基于所述单机动力学模型和所述相对动力学模型,得到所述多无人机系统的编队控制逻辑,其中,所述单机动力学模型代表的是任一无人机的动力学模型,所述相对动力学模型代表的是任一跟随无人机与领航无人机的相对动力学模型;
21、编队通信触发控制单元,用于在所述多无人机系统的各无人机基于所述编队控制逻辑进行编队巡航的过程里,当有跟随无人机接收到邻居无人机的状态量时,则所述跟随无人机根据接收到的状态量更新本地的控制器参数和通信触发函数,并将标志位设为第一状态,若未收到邻居无人机的状态量,则利用原先保存的状态量更新通信触发函数;当所述通信触发函数满足触发条件时,则所述跟随无人机向邻居无人机广播本地的状态量,并重置本地的通信触发函数和将标志位设为第一状态;当所述标志位为第一状态时,基于所述控制器参数结合预设的共识算法,计算所述跟随无人机的控制辅助变量,更新控制触发函数,再将所述标志位置为初始状态;当所述控制触发函数满足触发条件时,基于所述控制辅助变量,结合自适应扰动观测器和自适应滑模控制,得到所述跟随无人机的控制量。
22、优选地,所述控制器参数具体包括:位置测量误差、速度测量误差、触发频率影响参数、组合位置影响参数和组合速度影响参数。
23、优选地,所述通信触发函数具体为:
24、
25、2aγ2-β>0
26、
27、式中,式中,h为对称正定矩阵,a是矩阵h非0最小特征值,in是n维的单位矩阵,η为触发频率影响参数、β为组合位置影响参数。γ为组合速度影响参数,为跟随无人机i的位置测量误差,为跟随无人机i的速度测量误差,代表跟随无人机i的组合未知状态,代表跟随无人机i的组合速度状态,为领航无人机的位置测量误差,为领航无人机的速度测量误差,代表跟随无人机i的通信触发时刻序列的第k个时刻。
28、优选地,所述控制辅助变量的计算式具体为:
29、
30、式中,qi(t)为跟随无人机i的控制辅助变量,β为组合位置影响参数,γ为组合速度影响参数,代表跟随无人机i的组合未知状态,代表跟随无人机i的组合速度状态,代表跟随无人机i的通信触发时刻序列的第k个时刻。
31、优选地,所述控制量的计算式具体为:
32、
33、式中,为跟随无人机i的控制辅助变量,代表跟随无人机i的通信触发时刻序列的第k个时刻,为跟随无人机i的自适应开关增益参数,为跟随无人机i的滑模面,为跟随无人机i的扰动观测值,λ为自定义增益矩阵,所述自定义增益矩阵为对角矩阵且每个元素均为正数。
34、从以上技术方案可以看出,本技术具有以下优点:
35、本技术提供的技术方案先通过确定多无人机系统的通信链路拓扑,基于此通信链路拓扑,构建多无人机系统的动力学模型和编队控制逻辑,并在多无人机系统进行编队巡航的过程里,当有跟随无人机接收到邻居无人机的状态量时,则所述跟随无人机根据接收到的状态量更新本地的控制器参数和通信触发函数,并将标志位设为第一状态,若未收到邻居无人机的状态量,则利用原先保存的状态量更新通信触发函数;当所述标志位为第一状态时,基于所述控制器参数结合预设的共识算法,计算所述跟随无人机的控制辅助变量,更新控制触发函数,再将所述标志位置为初始状态,当所述控制触发函数满足触发条件时,基于所述控制辅助变量,结合自适应扰动观测器和自适应滑模控制,得到所述跟随无人机的控制量;同时,当本地的通信触发函数满足通信触发条件时,则跟随无人机向邻居无人机广播本地的状态量并重置本地的通信触发函数,当这些邻居无人机接收到状态量时,也会重复前述的更新本地的控制器参数和通信触发函数,并将标志位设为第一状态的过程,形成无人机系统内的触发通信控制的闭环,通过本技术提供的基于事件触发通信和控制,能够合理地决定更新时间,每个无人机能以3%左右的通信占比、1%左右的控制占比实现优秀的鲁棒编队性能,同时能显著提高控制和通信效率。
- 还没有人留言评论。精彩留言会获得点赞!