一种数据驱动的无人机编队网络防御方法
本发明涉及无人机飞行控制技术,特别是涉及考虑了网络攻击的影响的一种数据驱动的无人机编队网络防御方法。
背景技术:
1、无人机编队控制技术是指多架无人机在执行任务时通过协同工作、相互沟通和协调行动,以实现更高效、更灵活的飞行任务。这一技术背景涉及到多个关键领域,包括计算机科学、通信和控制理论。
2、值得注意的是,无人机编队的实施中,安全性是一个至关重要的问题。由于无人机通常通过网络进行通信和控制,它们可能受到网络攻击的威胁。保障通信链路的安全性,防范对编队系统的攻击,确保无人机的正常运行至关重要。
3、随着当下无人机气动结构的不断复杂化以及飞行任务的日益多样化,对无人机控制系统提出了更高的要求。为了应对无人机自身模型复杂、模型未知的挑战,同时在随机发生的网络攻击的影响下确保飞行性能,并保证控制系统需要具备一定的智能性和自主性。因此,迫切需要一种创新的无模型控制算法。这种算法能够在数据驱动的环境中设计最优控制率,使得无人机编队能够在网络攻击的影响下实现输出同步的同时,也能实现最佳的飞行性能。
4、综上所述,无人机编队技术的背景涉及对网络安全和智能决策的关注。在不断发展的无人机应用领域,这些关键技术的研究和应用将对实现安全、高效、可靠的无人机编队系统起到至关重要的作用。
技术实现思路
1、发明目的:本发明的目的是提供一种数据驱动的无人机编队网络防御方法,在线自主学习最优控制率,使编队在网络攻击下依然保证输出同步的同时,也能保证飞行性能的最优性。
2、技术方案:本发明的一种数据驱动的无人机编队网络防御方法,包括以下步骤:
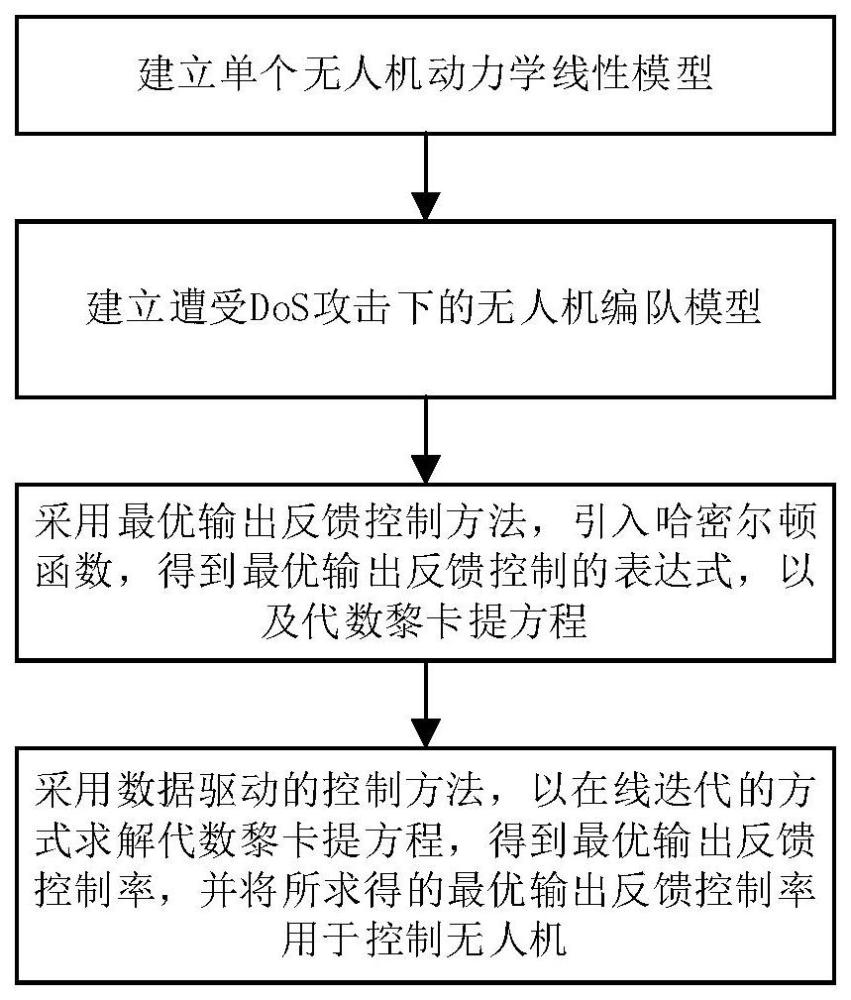
3、s1、根据单个无人机状态变量建立单个无人机动力学非线性模型,并通过线性化得到单个无人机动力学线性模型;单个无人机包括领导者无人机或跟随者无人机;
4、s2、建立领导者无人机模型和跟随者无人机模型,考虑跟随者无人机与领导者无人机之间的输出误差,确定跟踪误差变量,并得到增广系统,增广系统包括增广系统的下一时刻的状态变量和跟踪误差变量,考虑无人机遭受dos攻击,建立遭受dos攻击下的无人机编队系统;
5、s3、采用最优输出反馈控制方法,制定针对每个跟随者的具体控制策略,并将该控制策略带入步骤s2建立的遭受dos攻击下的无人机编队系统中,得到输出反馈控制下增广系统;针对输出反馈控制下增广系统引入哈密尔顿函数,得到最优输出反馈控制的表达式,并得到与最优输出反馈控制率相关的代数黎卡提方程;
6、s4、采用数据驱动的控制方法,以在线迭代的方式求解代数黎卡提方程,得到最优输出反馈控制率,并将所求得的最优输出反馈控制率用于控制无人机。
7、进一步的,步骤s1中得到的单个无人机动力学线性模型为:
8、
9、其中,x(k)∈rn,u(k)∈rm,y(k)∈rl,a为系统矩阵,b为控制矩阵,c为观测矩阵;n为控制状态维数,m为系统输入维数,l为系统输出维数;状态变量x(k)为离散化后当前时刻的无人机速度v、迎角α、俯仰角速率q、俯仰角θ;状态变量x(k+1)为离散化后下一时刻的无人机速度v、迎角α、俯仰角速率q、俯仰角θ;u(k)为无人机系统控制输入值,即为升降舵偏转角δe,y(k)为无人机系统输出值。
10、进一步的,步骤s2中建立领导者无人机模型和跟随者无人机模型,考虑跟随者无人机与领导者无人机之间的输出误差,确定跟踪误差变量,并得到增广系统,具体为:
11、建立领导者无人机模型为:
12、
13、其中,x0(k)为领导者无人机这一时刻的状态变量,x0(k+1)为领导者无人机下一时刻的状态变量,y0(k)为领导者无人机这一时刻的输出变量;e为领导者无人机的系统矩阵,f为领导者无人机的观测矩阵;
14、建立跟随者无人机模型为:
15、
16、其中,xi(k)为第i个跟随者无人机这一时刻的状态变量,xi(k+1)为第i个跟随者无人机下一时刻的状态变量,yi(k)为第i个跟随者无人机这一时刻的输出变量,ui(k)为第i个跟随者无人机这一时刻的控制变量;ai为第i个跟随者无人机的系统矩阵,bi为第i个跟随者无人机的输入矩阵,ci第i个跟随者无人机的观测矩阵,n为跟随者无人机的总数量;
17、根据领导者无人机模型和跟随者无人机模型,定义跟踪误差变量ei(k)为:
18、ei(k)=yi(k)-y0(k)
19、记得到如下增广系统:
20、
21、其中,为增广系统的下一时刻的状态变量,为增广系统的这一时刻的状态变量,为增广系统的系统矩阵,为增广系统的输入矩阵,为增广系统的观测矩阵。
22、进一步的,步骤s2中遭受dos攻击下的无人机编队系统为:
23、
24、其中,为遭受dos攻击下的无人机编队系统的下一时刻的状态变量,为遭受dos攻击下的无人机编队系统的这一时刻的状态变量,为遭受dos攻击下的无人机编队系统的系统矩阵,为遭受dos攻击下的无人机编队系统的输入矩阵,为遭受dos攻击下的无人机编队系统的观测矩阵,为遭受dos攻击下的无人机编队系统的这一时刻第i个跟随者的跟踪误差变量,为遭受dos攻击下的无人机编队系统第i个跟随者无人机这一时刻的控制变量;ai(k)为遭受dos攻击下的无人机编队系统这一时刻dos攻击发生与否的指示信号,ai(k)服从伯努利分布,当ai(k)=1时,表示这一时刻未发生dos攻击,当ai(k)=0时,表示这一时刻发生了dos攻击,n为跟随者无人机的总数量。
25、进一步的,步骤s3中第i个跟随者无人机的具体控制策略为:
26、
27、其中,为遭受dos攻击下的无人机编队系统的第i个跟随者无人机这一时刻的控制变量,为遭受dos攻击下的无人机编队系统的第i个跟随者无人机这一时刻的状态变量,为遭受dos攻击下的无人机编队系统的第i个跟随者无人机的输出反馈控制率,为遭受dos攻击下的无人机编队系统的观测矩阵;
28、得到的输出反馈控制下增广系统为:
29、
30、其中,为输出反馈控制下增广系统的下一时刻的状态变量,为输出反馈控制下增广系统的这一时刻的状态变量,为输出反馈控制下增广系统的系统矩阵,为输出反馈控制下增广系统的输入矩阵,为输出反馈控制下增广系统的第i个跟随者无人机的输出反馈控制率,为输出反馈控制下增广系统的观测矩阵,为输出反馈控制下增广系统的这一时刻dos攻击发生与否的指示信号;为输出反馈控制下增广系统的第i个跟随者无人机这一时刻跟踪误差变量;n为跟随者无人机的总数量;
31、引入的哈密尔顿函数为:
32、
33、其中,为这一时刻的哈密尔顿函数,为这一时刻的成本函数,vi(k+1)为下一时刻的值函数,vi(k)为这一时刻的值函数,e{}为需要期望运算符,η为折扣因子,为输出反馈控制下增广系统的第i个跟随者无人机的输出反馈控制变量;
34、针对上述哈密尔顿函数,做如下操作:
35、
36、得到最优输出反馈控制的表达式为:
37、
38、其中,为第i个跟随者无人机这一时刻的最优控制变量,ri为权重矩阵,为输出反馈控制下增广系统的输入矩阵,pi为代数黎卡提方程的解,为输出反馈控制下增广系统的这一时刻的状态变量;
39、因此,最优输出反馈控制率满足如下等式:
40、
41、其中,为第i个跟随者无人机的最优输出反馈控制率,为输出反馈控制下增广系统观测矩阵的右逆,pi为下述代数黎卡提方程的解:
42、
43、其中,为dos攻击发生与否指示信号的概率值。
44、进一步的,步骤s4中代数黎卡提方程求解方法具体包括:
45、s41、设计如下q函数:
46、
47、其中,qi(k)为这一时刻的q函数,为这一时刻的成本函数,η为折扣因子,为输出反馈控制下增广系统的下一时刻状态变量的转置,pi为代数黎卡提方程的解,为输出反馈控制下增广系统的下一时刻的状态变量,为增广系统这一时刻状态变量的转置,为增广系统这一时刻的状态变量,为这一时刻复合变量的转置,mi为核矩阵,zi(k)为这一时刻的复合变量,e{ }为期望运算符;
48、首先初始化迭代次数为t=0,选择初始化权重矩阵qi和ri,选择折扣因子η;
49、s42、策略评估:收集无人机编队系统的输入输出数据,收集足够步长的数据集l求解输出反馈q函数,其中l满足l>(n+m)*(n+m+1)/2,其中n为控制状态维数,m为输入维数;
50、运用最小二乘法执行:
51、
52、其中,为下一时刻复合变量的转置,为第t次迭代的核矩阵,zi(k+1)为下一时刻的复合变量,zi(k)为这一时刻的复合变量;
53、s43、策略更新:
54、在每一步迭代中,控制率按照如下表达式迭代:
55、
56、其中,为第t次迭代的输出反馈控制率,为第t次迭代的核矩阵右下角m*m维的块矩阵的逆矩阵,为第t次迭代的核矩阵的左下角m*n维的块矩阵;
57、s44、终止条件:当达到收敛条件时停止迭代,此时的为最优的核矩阵其中∈为一个预先设计好的收敛条件常数;如果不满足停止迭代的条件,则更新t=t+1,继续迭代。
58、基于相同的发明构思,本发明的一种数据驱动的无人机编队网络防御系统,包括:
59、无人机动力学模型建立单元,用于根据单个无人机状态变量建立单个无人机动力学非线性模型,并通过线性化得到单个无人机动力学线性模型;单个无人机包括领导者无人机或跟随者无人机;
60、无人机编队模型建立单元,用于建立领导者无人机模型和跟随者无人机模型,考虑跟随者无人机与领导者无人机之间的输出误差,确定跟踪误差变量,并得到增广系统,增广系统包括增广系统的下一时刻的状态变量和跟踪误差变量,考虑无人机遭受dos攻击,建立遭受dos攻击下的无人机编队系统;
61、最优输出反馈控制率形式确定单元,用于采用最优输出反馈控制方法,制定针对每个跟随者的具体控制策略,并将该控制策略带入建立的遭受dos攻击下的无人机编队系统中,得到输出反馈控制下增广系统;针对输出反馈控制下增广系统引入哈密尔顿函数,得到最优输出反馈控制的表达式,并得到与最优输出反馈控制率相关的代数黎卡提方程;
62、最优输出反馈控制率计算单元,用于采用数据驱动的控制方法,以在线迭代的方式求解代数黎卡提方程,得到最优输出反馈控制率,并将所求得的最优输出反馈控制率用于控制无人机。
63、基于相同的发明构思,本发明的一种电子设备,所述设备包括:
64、存储有可执行程序代码的存储器;
65、与所述存储器耦合的处理器;
66、所述处理器调用所述存储器中存储的所述可执行程序代码,执行如上述的一种数据驱动的无人机编队网络防御方法的步骤。
67、基于相同的发明构思,本发明的一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行如上述的一种数据驱动的无人机编队网络防御方法的步骤。
68、基于相同的发明构思,本发明的一种计算机程序产品,该计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,且该计算机程序用于操作来使计算机执行如上述的一种数据驱动的无人机编队网络防御方法的步骤。
69、有益效果:与现有技术相比,本发明的优点为:
70、(1)本发明提供了一种数据驱动的无人机编队网络防御方法,旨在克服网络攻击对无人机飞行控制的影响。
71、(2)与传统方法不同,本方法的飞行控制率设计仅依赖于系统运行数据。在这个数据驱动的环境下,实现在线自适应学习控制率,而无需事先获得系统模型。
72、(3)本发明设计的控制方法基于最优控制理论,不仅在遭受dos攻击的环境下依然能实现无人机编队控制,成本函数的引入还能保证控制器设计的最优性,因此具有十足的实用价值。
- 还没有人留言评论。精彩留言会获得点赞!