管道自动检测机器人的运动系统控制方法、系统及设备
本发明涉及管道检测,特别是涉及一种管道自动检测机器人的运动系统控制方法、系统及设备。
背景技术:
1、在石油产业中,管道是原油的主要运输形式之一。由于大量管道使用年限久矣,管路趋于老化,且防腐功能日益减弱,导致管道泄漏成为了破坏生态并严重污染生存环境的源头。此外,石油管道布线复杂,管线阀室位置多位于荒郊野外,抢险补漏需要耗费大量人力物力。因此,对石油管道持续进行全天候严密监测是预防泄漏事故并及时维修的必要手段。然而,传统的管道检测系统更依赖各种仪器及人力巡检,难以对管道全局进行高灵敏度监测,对于缓慢的腐蚀渗漏不能及时发现。并且,由于市政管网内部空间和内部环境条件等各种因素,人工检测管道的方式具有不可预测的危险性。
2、为了避免类似悲剧发生,能够协助和代替人类进行排水管道检测、养护、修护的机器人成为发展趋势。管道检测机器人是一种能够在管道内部进行检测的自动化设备,其技术背景包括机械设计、传感器技术、嵌入式系统、无线通信、导航定位和机器人技术等多个领域。管道检测机器人需要具备一定的运动能力和感知能力,以便能够在管道内部自由移动并进行检测。因此,管道检测机器人需要采用高效的机械设计和驱动系统,以确保机器人具有良好的稳定性和机动性。同时,还需要配备多种传感器和探测器,以便能够准确感知周围环境并获取相关信息。
3、随着交通、通讯、石油、化工及城市建设的发展,各领域所铺设的管道累计长度将急剧增加,管内爬行器的应用场合将越来越广泛,它所发挥的作用也将越来越大。
4、目前由于由于传统机器人功能有限,难以完成管道检测任务。所以管道维修存在多方面的问题:一方面由于各种外部环境以及复杂原因的积累,管道内部会出现腐蚀、裂纹、漏孔等多种情况,而管道内部空间狭小,操作人员无法进入,这在一定程度上提高了管道排查的困难;另一方面工业中使用的石油、天然气以及城市管道往往运输距离达几公里,甚至十几公里,对于远距离的管道内窥检测仍有着非常大的需求。由于新建管线没有输送介质只能采用空气打压或自主爬行进行管内检测,而采用气体推动方式会使检测器运行不平稳,当气压不够时,管道内检测器会停留在管道中,而在达到行进压力时,管道内检测器会瞬间弹射达到最高几十米的速度,速度不平稳会对采集的数据产生巨大的影响,影响检测精度。
技术实现思路
1、本发明实施例的目的是提供一种管道自动检测机器人的运动系统控制方法、系统及设备,通过plc对检测机器人的行进、后退及变速进行控制,实现了管道内检测机器人在城镇燃气管道中以匀速行走,提高了检测数据的准确性。
2、为实现上述目的,本发明实施例提供了如下方案:
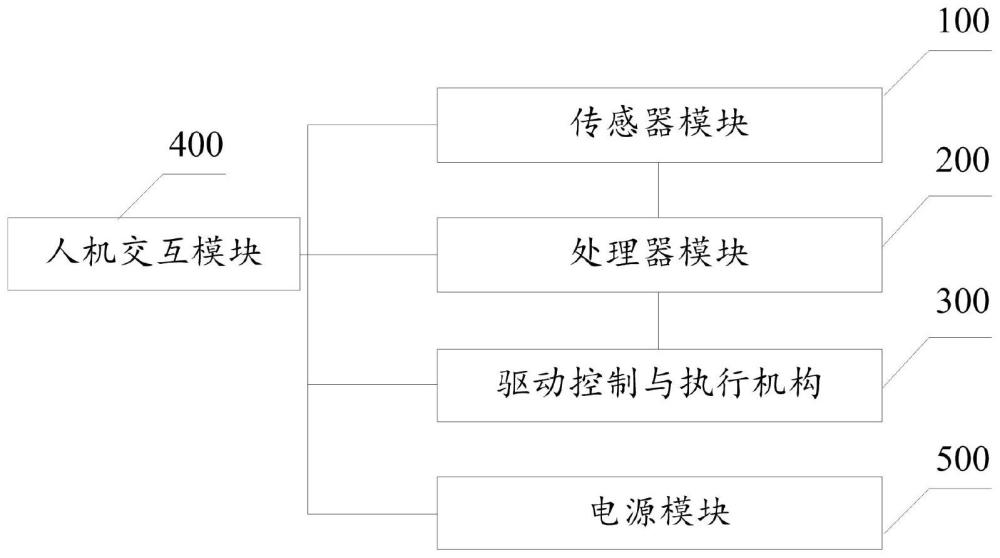
3、一种管道自动检测机器人的运动系统控制系统,包括:
4、传感器模块,用于获取爬行小车自身信息及外部环境信息;所述自身信息包括:速度、位置或车身姿态角度;
5、处理器模块,与所述传感器模块连接,用于对所述爬行小车自身信息及外部环境信息进行数据处理,得到第一控制指令;所述第一控制指令包括:l0位电路总开关输出量、超速控制开关输出量和刹车系统开关输出量;
6、驱动控制与执行机构,与所述处理器模块连接,用于将所述第一控制指令进行放大后得到第二控制指令;所述第二控制指令驱动执行机构进行爬行小车的运动控制;
7、人机交互模块,与所述处理器模块连接,用于传输和显示所述爬行小车自身信息、外部环境信息和第一控制指令;
8、电源模块,分别与所述传感器模块、处理器模块、驱动控制与执行机构和人机交互模块连接,用于为所述传感器模块、处理器模块、驱动控制与执行机构和人机交互模块提供能量。
9、可选地,所述驱动控制与执行机构包括:永磁电机、直流电机及驱动器。
10、可选地,所述管道自动检测机器人的运动系统控制系统还包括:plc模块;
11、所述plc模块分别与电源模块和爬行小车的驱动轮进行连接;
12、所述plc模块包括:l0位电路总开关、里程记录开关l1、里程记录开关l2、里程记录开关l3、互感器d2、切换电阻d3和刹车电阻d5。
13、可选地,所述处理器模块还用于接收开关输入量;
14、所述开关输入量包括:l0位电路总开关输入量、里程记录开关l1输入量、里程记录开关l2输入量和里程记录开关l3输入量。
15、可选地,当所述爬行小车下坡时,里程记录开关l1输入量、里程记录开关l2输入量和里程记录开关l3输入量的脉冲次数增加,所述处理器模块根据所述脉冲次数判断是否存在加速,得到所述l0位电路总开关输出量、超速控制开关输出量或刹车系统开关输出量;
16、所述超速控制开关输出量用于降低所述直流电机的输出功率;
17、所述刹车系统开关输出量用于降低所述爬行小车的车速;
18、所述l0位电路总开关输出量用于关断所述电源模块的电能输出。
19、可选地,
20、当所述爬行小车突然下陡坡或下垂直坡且没有加速时,所述传感器模块的爬行小车自身信息第一个进入所述处理器模块进行处理;
21、判断爬行小车下坡车身姿态角度是否超过第一预设阈值,和/或,速度是否超过第二预设阈值;
22、若是,所述l0位电路总开关输出量关断所述电源模块,所述刹车系统开关输出量降低所述爬行小车的车速;
23、若否,所述l0位电路总开关输入量导通所述电源模块,所述刹车电阻d5关断。
24、可选地,所述永磁电机和直流电机都装有电流传感器和电压传感器;
25、当任意一台永磁电机或直流电机出故障或运行不正常时,所述处理器模块将会自动复位所述永磁电机、直流电机或驱动器的端口;
26、当任意一台永磁电机或直流电机经n次复位后仍无法正常运行时,所述处理器模块将会停止对应的所述永磁电机或直流电机运行。
27、为实现上述目的,本发明实施例还提供了如下方案:
28、一种管道自动检测机器人的运动系统控制方法,包括:
29、获取爬行小车自身信息及外部环境信息;所述自身信息包括:速度、位置或车身姿态角度;
30、对所述爬行小车自身信息及外部环境信息进行数据处理,得到第一控制指令;所述第一控制指令包括:l0位电路总开关输出量、超速控制开关输出量和刹车系统开关输出量;
31、将所述第一控制指令进行放大后得到第二控制指令;所述第二控制指令驱动执行机构进行爬行小车的运动控制;
32、传输和显示所述爬行小车自身信息、外部环境信息和第一控制指令;电源模块提供能量。
33、一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述的管道自动检测机器人的运动系统控制方法。
34、一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现所述的管道自动检测机器人的运动系统控制方法。
35、在本发明实施例中,根据管道检测机器人控制系统的需求分析,完成了控制系统总体架构的详细设计。保证检测系统的安全运行,能够适应高效长时间的持续工作,具有高可靠性。在平稳管段匀速运行,在爬坡管段加大动力运行,在下坡管段减小动力运行,确保检测机器人的稳定运行。有一定的越障能力,能够通过小而弯型的管道。
36、确定了plc的结构、接线设计和总体程序的分析,完成了管道内检测机器人的控制部分的要求。其运行的管道环境具有运行空间狭小,运行距离较长,同时管道处可能会转弯,温度在0℃-40℃区间内变化等特点。将为新建管道安全保障提供一个新的检测手段,管道内检测机器人可以带动不同的传感器检测节进行新建管道内检测,为新建管道投产安全运行提供了有力的保障。
37、传统检测机器人多采用气动或液动的方式作为动力源,在检测行进过程易收到检测环境、检测材质的影响,速度不稳定,影响检测的精度。本发明对检测机器人的速度控制方案进行了优化,具有以下优点:
38、(1)在不同的管道工况下,具有很好的通过运行能力。
39、(2)具有良好的上下坡控制能力,可适应多种环境下的工作。
40、(3)有一定的越障能力,能够通过小而弯型的管道。
41、(4)小车整个控制结构简单,可靠性高,可稳定持久运作。
- 还没有人留言评论。精彩留言会获得点赞!