一种智能集群复杂任务分配与协作方法与流程
本技术涉及无人机协同多任务分配,特别涉及一种智能集群复杂任务分配与协作方法。
背景技术:
1、协同多任务分配问题(cooperative multi-tasks assignment problem,cmtap)是一类多重约束条件下的组合优化问题,通过最小化任务执行的总时间或者无人机飞行的总距离来实现任务分配。假设有nv架无人机针对nt个已知目标执行nm个任务,在满足协同、无人机性能、环境等各类约束条件的同时,需要将任务集合分解成合适的任务子集分配给各无人机,并确定执行各项任务的顺序、时间和代价等,使得协同作战的作战效能达到最大,即总体的代价cost最小,收益reward最大。
2、目前的方法使得问题描述简单、易于理解,但在实际作战背景下无人机通常异构而且单个目标点存在有时序的不同任务待执行,目标点数量较多、无人机异构以及任务耦合使得算法复杂度较高,容易陷入局部最优甚至无法得到最优解,因此在满足一定约束条件下设计智能算法提高分配算法的全局搜索能力就有了很大的实际意义。
技术实现思路
1、本技术提供了一种智能集群复杂任务分配与协作方法,可用于解决现有技术中全局搜索能力效果较差的技术问题。
2、本技术提供一种智能集群复杂任务分配与协作方法,方法包括:
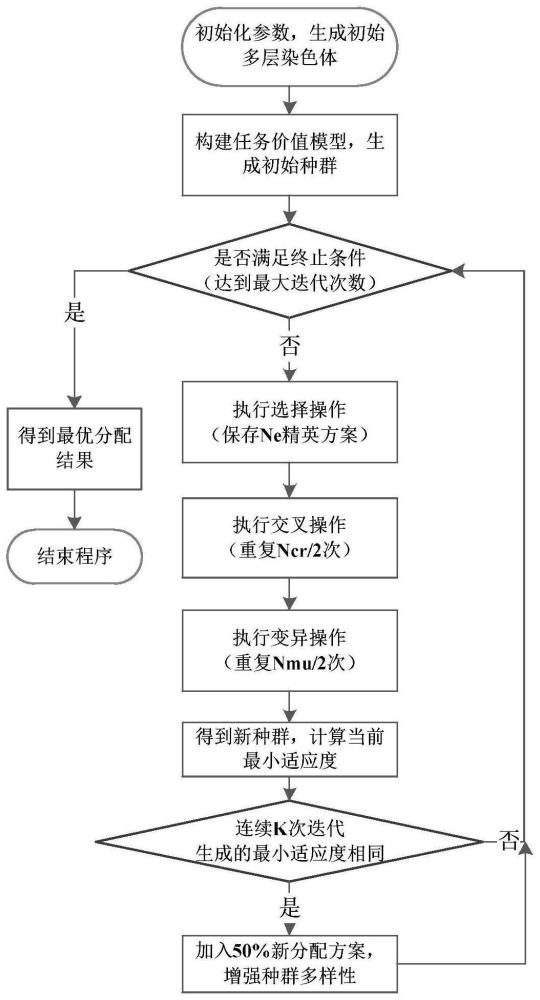
3、步骤一,初始化参数:
4、生成大小为5×nm的零矩阵,记为单个初始多层染色体;包含的5行元素从上到下依次是执行顺序序号、目标点序号、任务类型序号、无人机序号以及无人机执行任务时的航向角;
5、步骤二,任务价值模型构建。
6、通过步骤一初始化生成np个可行染色体,记为初始种群;
7、按照约束和评价指标构建任务价值模型,任务价值模型为代价函数,初始种群中的np个可行方案根据代价函数得到np个对应数值,记为适应度值,对适应度值进行排序,保留最小的前ne个适应度值以及对应的分配方案。
8、步骤三,针对步骤二中的初始种群,通过不同遗传操作更改种群中的分配方案,在操作结束后重新计算该种群中np个可行方案对应的适应度值,对适应度值进行排序,最小值记为本次迭代中的最小适应度值,对应的分配方案记为本次迭代中的最佳分配方案。
9、步骤四,重复步骤三,针对每次迭代结果自适应调整步骤三中遗传操作的具体参数,当判断算法陷入局部最优时加入鲜染色体;保留每次迭代的得到的种群最小适应度值,迭代满规定的次数后,绘制全体适应度值曲线,其中的最小值记为代价函数的最佳适应度,对应的分配方案视为该任务价值模型对应的最优分配方案。
10、进一步的,染色体的每一列表示在当前顺序下某类型无人机在目标点a执行了任务b,到达任务点的航向角为角度c,一个初始多层染色体对应一种可行的任务分配方案。
11、进一步的,步骤二,任务价值模型构建的约束条件具体如下:
12、a、协同约束:无人机之间不重复分配相同的任务,即最终的分配方案中,一项任务只有一架无人机去执行;
13、b、无人机功能约束:异构无人机根据搭载载荷的不同,可执行的任务类型也不同,设置三种无人机,监视无人机用于执行侦察、确认任务,攻击无人机仅用于执行攻击任务,一体化无人机侦察、攻击、确认三种任务均能够执行。
14、c、任务时序约束:对于多类任务分配问题,一个目标需要执行侦察、攻击、确认在内的多个任务,不同任务的完成价值不同,任务需要按预定的时间顺序依次执行,三种任务需要|按照先侦察再攻击最后确认的顺序执行;
15、d、无人机动力约束:
16、使用dubins模型模拟无人机飞行路径,时间限制基于距离和速度确定,对各无人机和目标点间的直线距离排序,选取前3项最大值求和,除以全体无人机速度的平均值,得到的结果为单架无人机执行任务的时间限制;
17、进一步的,约束条件对应提出的评价指标如下:
18、任务约束惩罚指标:根据协同约束、无人机功能约束以及任务时序约束,提出任务约束惩罚指标;每项任务都应分配唯一无人机执行,当同时满足任务全部执行、异构无人机可执行分配给它的任务,以及同一目标点的三项任务执行顺序符合约束时,惩罚项ptask=0;当上述约束存在一项不满足时,设置惩罚值ptask=1000;
19、执行任务总时长指标:根据无人机动力约束,提出执行任务总时长指标,评估无人机执行任务总时长;总时长tall越小越好,且当单架无人机的任务执行时间没有超过设定的时间限制时,惩罚项ptime=0;当超过时间限制时,设置惩罚值ptime=1000;
20、执行任务均衡性指标:每架无人机的路径长度在总路径长度较小的前提下,应尽量保持均衡;均衡度j用单架无人机路径长度差的最大值除以最大路径长度确定,确定方法如下:
21、
22、其中,li表示单架无人机执行任务的路径长度,均衡度评价指标η=1-j,j越小,η越接近于1,表示每架无人机的路径长度越均衡;
23、综合约束条件与评价指标,任务代价函数如下:
24、
25、其中,α和β分别为总路径长度和路径均衡度j的权值,用于调整这两项在代价函数中的重要程度,r表示一项任务的完成价值,表示任务总价值,ptask是任务约束惩罚项,ptime是任务时长惩罚项。
26、进一步的,步骤三,针对步骤二中的初始种群,通过不同遗传操作更改种群中的分配方案,在操作结束后重新计算该种群中np个可行方案对应的适应度值,对适应度值进行排序,最小值记为本次迭代中的最小适应度值,对应的分配方案记为本次迭代中的最佳分配方案,包括:
27、步骤31,选择操作:首先采用精英算子,将步骤二中得到的前ne个最小适应度值对应的分配方案,视为较优方案直接保存到新种群当中;接着采用轮盘赌法,在保证适应度值越小的分配方案被选择的可能性越大的前提下,随机选择当前种群中的分配方案,用于之后的交叉以及变异操作;
28、步骤32,交叉操作:首先针对选择操作中获得的两个分配方案,转换为目标顺序,随机选择两个交叉点;接着交换两个旧分配方案中两个交叉点间的分配信息,重新生成两个新分配方案,同时将目标顺序的新分配方案转换为执行顺序;最后重复上述步骤ncr/2次,生成ncr个新分配方案;
29、步骤33,变异操作:首先针对选择操作中获得的两个分配方案,转换为目标顺序,随机选择两个变异点;接着对变异点对应的无人机序号或对应无人机执行任务的航向角进行突变,生成两个突变后的新分配方案,同时将目标顺序的新分配方案转换为执行顺序;最后重复上述步骤nmu/2次,生成nmu个新分配方案。
30、进一步的,步骤四中自适应参数如下进行调整:
31、在每次迭代后,最终生成的np个可行分配方案,由精英选择操作生成的ne个分配方案、交叉操作产生的ncr个分配方案、变异操作产生的nmu个分配方案以及nnew个新分配方案,基于如下方法根据迭代次数自适应调整参数ncr和nmu:
32、
33、nmu=np-nnew-ne-ncr
34、其中,nt为当前迭代次数,niter为算法设置的总迭代次数,nnew为加入新分配方案的数量,当k次迭代内最小适应度值发生变化时,nnew=0;当连续k次迭代生成的最小适应度值相同时,判断算法陷入局部最优,加入50%新分配方案,增强种群多样性,帮助算法跳出局部最优解。
35、本技术在无人集群协同多任务分配问题中起到改善作用,在满足一定的约束条件下,通过构建多层染色体减少任务耦合约束,通过构建任务价值模型评估任务分配结果的优劣,通过参数自适应调整提高算法的全局搜索能力,最终得到最优分配方案。
- 还没有人留言评论。精彩留言会获得点赞!