一种无人机避障方法、系统及计算机设备与流程
本发明涉及无人机仿地飞行安全的,更具体地,涉及一种无人机避障方法、系统及计算机设备。
背景技术:
1、仿地飞行,是指无人机根据获取的地形数据调整飞行高度,保持对地的恒定高差。无人机避障,是指无人机在飞行过程中实时感知周围环境,并根据感知到的障碍物信息进行避障操作,以避免与障碍物发生碰撞。但是,在不同的作业环境中对无人机避障能力要求不同。普通的飞行方式,可能遇到的障碍物比较固定,通常是大型的、容易识别的建筑物或树母,避障自由度较高,通常直接绕开即可;而仿地飞行方式需要保持在固定的距地高度,以保证测量人较高的重叠度和精度,若随意绕开或切换航线,将影响仿地飞行的测量效果。
2、现有技术中,针对无人机仿地飞行过程中的避障提出的技术方案不少,如一种雷达探测角度控制方法、仿地飞行控制方法及相关装置,该方法包括:获得作业航线的预设角度描述信息,其中,预设角度描述信息用于指示雷达在作业航线的各位置需要跟随的目标探测角度,各位置需要跟随的目标探测角度根据作业航线对应的地势起伏情况和/或预设的目标对地距离确定;在执行作业航线时,根据预设角度描述信息控制雷达的探测角度。如此,可根据作业航线对应的地势起伏情况和/或预设的目标对地距离对雷达的探测角度进行控制,以减少不必要的避障行为。又如一种无人机的控制方法,包括:在无人机进行仿地飞行时,若距离传感器和视觉传感器的感测均有效,利用距离传感器和视觉传感器,识别无人机的航线方向上的障碍物信息;根据障碍物信息,控制无人机按照第一绕行方式绕开航线方向上的障碍物飞行,其中,第一绕行方式满足:无人机绕开障碍物飞行时距离无人机的目标作业物的高度与无人机的仿地飞行高度之间的差值小于或等于预设阈值。该方法能够在保证无人机的作业安全性的同时,提高无人机的作业效率和作业效果。
3、虽然上述方案都有提及避障与仿地飞行的测量效率、测量效果,但基本均是针对固定障碍物,如建筑物、树木的情形,而并未考虑到动态障碍物,如移速较快或突然出现的鸟类,或移速较慢的漂浮物,这使得无人机在仿地飞行过程中,若遇到动态障碍物,将不具备相应的应对能力。并且,还可能将移速较慢的动态障碍物误判为地物,导致距地高度不固定,或者来不及躲避,威胁飞行安全。
技术实现思路
1、本发明为克服上述现有技术在无人机仿地飞行过程中,无法应对动态障碍物的缺陷,提供一种无人机避障方法、系统及计算机设备。
2、为解决上述技术问题,本发明的技术方案如下:
3、本发明提供了一种无人机避障方法,包括:
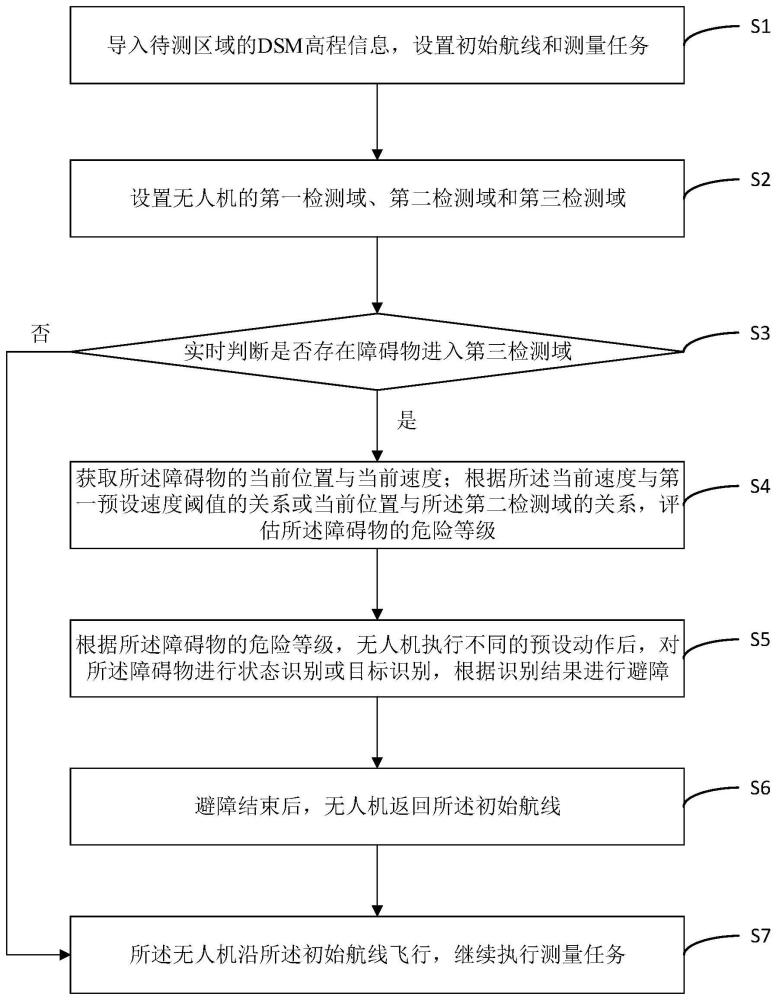
4、s1:导入待测区域的dsm高程信息,设置初始航线和测量任务;
5、s2:设置无人机的第一检测域、第二检测域和第三检测域;
6、s3:实时判断是否存在障碍物进入第三检测域;若否,执行步骤s7;否则,执行步骤s4;
7、s4:获取所述障碍物的当前位置与当前速度;根据所述当前速度与第一预设速度阈值的关系或当前位置与所述第二检测域的关系,评估所述障碍物的危险等级;
8、s5:根据所述障碍物的危险等级,无人机执行不同的预设动作后,对所述障碍物进行状态识别或目标识别,根据识别结果进行避障;
9、s6:避障结束后,无人机返回所述初始航线;
10、s7:所述无人机沿所述初始航线飞行,继续执行测量任务。
11、优选地,所述设置无人机的第一检测域、第二检测域和第三检测域包括:
12、无人机的长度为a,以无人机中心为球心,设置第一检测半径l和第二检测半径m,所述第一检测半径覆盖的区域为第一检测域,所述第二检测半径覆盖的区域与第一检测域之间的区域为第二检测域;其中,2a≤l<5a,5a≤m<50a;
13、以无人机航向与第二检测域的边缘的交点为球心,设置2m为第三检测半径,所述第三检测半径覆盖的区域与第二检测域之间的区域为第三检测域。
14、优选地,所述根据所述当前速度与第一预设速度阈值的关系或当前位置与所述第二检测域的关系,评估所述障碍物的危险等级,包括:
15、将障碍物当前速度记为v1,将第一预设速度阈值记为v1′;
16、当v1≥v1′且障碍物的当前位置在第二检测域内时,评估所述障碍物的危险等级为第一危险等级;
17、当v1≥v1′且障碍物的当前位置不在第二检测域内时,评估所述障碍物的危险等级为第二危险等级;
18、当0<v1<v1′且障碍物的当前位置在第二检测域内时,评估所述障碍物的危险等级为第三危险等级;
19、当0<v1<v1′且障碍物的当前位置不在第二检测域内时,评估所述障碍物的危险等级为第四危险等级;
20、当v1=0时,评估所述障碍物的危险等级为第五危险等级。
21、优选地,所述步骤s5包括:
22、当所述障碍物的危险等级为第一危险等级时,无人机执行拉升动作,拉升第一预设高度后悬停,对所述障碍物进行状态识别,包括:
23、实时获取无人机悬停后障碍物的移动位置和移动速度,将移动速度记为v2;
24、若在第一预设时间内,所述障碍物不在第二检测域内且v2≥v1′,则将所述障碍物的危险等级调整为第二危险等级;
25、若在第一预设时间内,所述障碍物不在第二检测域内且v2<v1′,则将所述障碍物的危险等级调整为第四危险等级;
26、若在第一预设时间内,所述障碍物在第二检测域内且v2≥v1′,则无人机执行返航操作,并返回步骤s3;
27、若在第一预设时间内,所述障碍物在第二检测域内且v2<v1′,则将所述障碍物的危险等级调整为第三危险等级。
28、优选地,所述步骤s5还包括:
29、当所述障碍物的危险等级为第二危险等级时,无人机执行悬停动作,对所述障碍物进行状态识别,包括:
30、实时获取无人机悬停后障碍物的移动位置和移动速度,将移动速度记为v2;
31、若在第二预设时间内,所述障碍物在第三检测域内且v2≥v1′,则无人机持续悬停,直到障碍物不在第三检测域内;
32、若在第二预设时间内,所述障碍物在第三检测域内且v2<v1′,则将所述障碍物的危险等级调整为第四危险等级;
33、若在第二预设时间内,所述障碍物不在第三检测域内,则避障结束。
34、优选地,所述步骤s5还包括:
35、当所述障碍物的危险等级为第三危险等级时,无人机执行悬停动作,对所述障碍物进行目标识别,包括:
36、获取所述障碍物的图片,利用预设的目标识别算法,获得所述障碍物的种类,包括鸟类和漂浮物;
37、当所述障碍物为鸟类时,则将所述障碍物的危险等级调整为第一危险等级;
38、当所述障碍物为漂浮物时,无人机沿初始航线继续测量任务,并继续实时获取障碍物的移动位置;
39、仅当障碍物进入第一检测域内时,无人机执行拉升动作,在拉升第一预设高度后悬停,并对所述障碍物进行状态识别,直到障碍物不在第一检测内,则避障结束。
40、优选地,所述步骤s5还包括:
41、当所述障碍物的危险等级为第四危险等级时,无人机执行悬停动作,对所述障碍物进行目标识别,包括:
42、获取所述障碍物的图片,利用预设的目标识别算法,获得所述障碍物的种类,包括鸟类和漂浮物;
43、当所述障碍物为鸟类时,继续实时获取障碍物的移动位置;
44、若在第二预设时间内,所述障碍物在第三检测域内,则无人机持续悬停,直到障碍物不在第三检测域内;
45、若在第二预设时间内,所述障碍物不在第三检测域内,则避障结束;
46、当所述障碍物为漂浮物时,当所述障碍物为漂浮物时,无人机沿初始航线继续测量任务,并继续实时获取障碍物的移动位置;
47、仅当障碍物进入第一检测域内时,无人机执行拉升动作,在拉升第一预设高度后悬停,直到障碍物不在第一检测域内,则避障结束。
48、优选地,所述步骤s5还包括:
49、当所述障碍物的危险等级为第五危险等级时,无人机沿初始航线继续测量任务,并继续实时获取障碍物的移动位置;
50、仅当障碍物进入第一检测域内时,无人机执行拉升动作,在拉升第一预设高度后沿设置的航向飞行,直到障碍物不在第一检测域内,则避障结束。
51、本发明还提供了一种无人机避障系统,用于实现上述的避障方法,包括:
52、任务设置模块,用于导入待测区域的dsm高程信息,设置初始航线和测量任务;
53、检测域设置模块,用于设置无人机的第一检测域、第二检测域和第三检测域;
54、判别模块,用于实时判断是否存在障碍物进入第三检测域;若否,转至持续飞行模块;否则,转至危险等级评估模块;
55、危险等级评估模块,用于获取所述障碍物的当前位置与当前速度;根据所述当前速度与第一预设速度阈值的关系或当前位置与所述第二检测域的关系,评估所述障碍物的危险等级;
56、避障模块,用于根据所述障碍物的危险等级,无人机执行不同的预设动作后,对所述障碍物进行状态识别或目标识别,根据识别结果进行避障;
57、回归航线模块,用于避障结束后,无人机返回所述初始航线;
58、持续飞行模块,用于所述无人机沿所述初始航线飞行,继续执行测量任务。
59、本发明还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的避障方法的步骤。
60、与现有技术相比,本发明技术方案的有益效果是:
61、本发明首先导入无人机仿地飞行时待测区域的dsm高程信息,设置初始航线、测量任务、第一检测域、第二检测域和第三检测域;当存在障碍物进入第三检测域时,获取所述障碍物的当前位置与当前速度;根据所述当前速度与第一预设速度阈值的关系或当前位置与所述第二检测域的关系,评估所述障碍物的危险等级;之后根据所述障碍物的危险等级,无人机执行不同的预设动作后,对所述障碍物进行状态识别或目标识别,根据识别结果进行避障;最后,避障结束后,无人机返回所述初始航线继续飞行,执行测量任务。本发明通过设置不同范围的检测域,并实时获取障碍物的当前位置与当前速度,评估障碍物的危险等级;对不同危险等级的障碍物执行不同的预设动作,再结合状态识别或目标识别,针对性的进行避障,能够准确应对高速动态障碍物、低速动态障碍物和固定障碍物的多种情况,提高了无人机仿地飞行的安全性。
- 还没有人留言评论。精彩留言会获得点赞!