一种用于工业机器人的安全控制电路的制作方法
本技术涉及工业机器人,具体是一种用于工业机器人的安全控制电路。
背景技术:
1、由于工业机器人产品有着与其他产品不同的特征,其运动部件,特别是手臂和手腕部分具有较高的能量,且以较快的速度掠过比机器人机座大得多的空间,并随着生产环境和条件及工作任务的改变,其手臂和手腕的运动亦随之改变。若遇到意外故障或误动作,则对操作者、编程示教人员及维修人员均存在着潜在的伤害。《工业机器人安全实施规范》gb/t20867-2007中对风险的分析中指出,人因差错产生的危险,设计、开发、制造(包括人类工效学考虑)——如在设计时,未考虑对人员的防护;末端夹持器没有足够的夹持力,容易滑脱夹持件;动力源和传输系统没有考虑动力消失或变化时的预防措施;控制系统没有采取有效的抗干扰措施;系统构成和设备布置时,设备间没有足够的间距;布置不合理等形成潜在的、无意识的启动、失控等
2、另外《工业机器人安全实施规范》gb/t20867-2007中对风险的分析中指出,人因差错产生的危险,设计、开发、制造(包括人类工效学考虑)——如在设计时,未考虑对人员的防护;末端夹持器没有足够的夹持力,容易滑脱夹持件;动力源和传输系统没有考虑动力消失或变化时的预防措施;控制系统没有采取有效的抗干扰措施;系统构成和设备布置时,设备间没有足够的间距;布置不合理等形成潜在的、无意识的启动、失控等。
3、因此提升机器人电气系统的安全可靠性成为当务之急。
技术实现思路
1、本实用新型的目的在于提供一种用于工业机器人的安全控制电路,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种用于工业机器人的安全控制电路,包括电源电路、安全型继电器电路、接口电路、控制电路和延时电路,所述控制电路包括控制电路一和控制电路二,电源电路分别连接安全型继电器电路、接口电路和延时电路,安全型继电器电路还分别连接控制电路一和控制电路二。
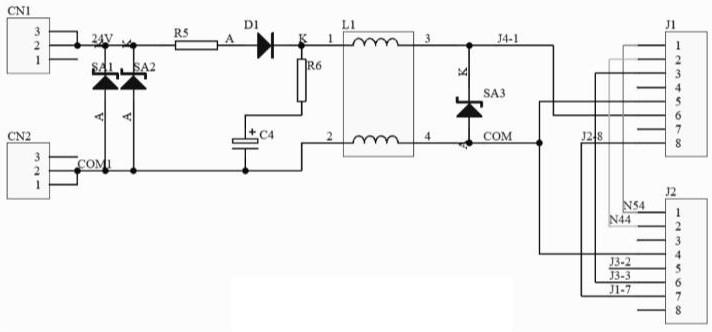
4、作为本实用新型的进一步技术方案:所述电源电路包括稳压管sa1、稳压管sa2、二极管d1、电阻r6和电感c4,稳压管sa1的阴极连接接口can1、稳压管sa2的阴极和电阻r5,电阻r5的另一端连接二极管d1的阳极,二极管d1的阴极连接电阻r6和电感l1的端口1,电阻r6的另一端连接电容c4,电感l1的端口3连接稳压管sa3的阴极和接口j1的端口6,电容c4的另一端连接稳压管sa1的阳极、稳压管sa2的阳极、接口can2和电感l1的端口2,电感l1的端口4连接稳压管sa3的阳极、接口j1的端口5和接口j2的端口4。
5、作为本实用新型的进一步技术方案:所述安全型继电器电路包含继电器k1和继电器k2,继电器k1和继电器k2均为带机械联锁触点的tüv认证的安全型继电器。
6、作为本实用新型的进一步技术方案:所述接口电路包括接口n13、接口n14、接口n23、接口n24、接口n33和接口n34,接口n13和接口n14为一组常开触点的接口电路,接口n23和接口n24为一组常开触点的接口电路,接口n33和接口n34为一组常开触点的接口电路。
7、作为本实用新型的进一步技术方案:所述控制电路一包括继电器ka1、三极管tr1、三极管tr2和三极管tr3,继电器ka1的端口5连接二极管d3的阳极和二极管d5的阴极,二极管d3的阴极连接继电器ka1的端口3,二极管d5的阳极连接电容c9、继电器ka1的端口4、电阻r10、电容c5和电容c7,电容c7的另一端连接电阻r13,电阻r13的另一端连接二极管d4的阴极、电阻r8和继电器ka1的端口2,电阻r8的另一端通过电阻r9连接电阻r10的另一端、电容c5的另一端和光耦phc1内部二极管的阳极,继电器ka1的端口1通过电阻r18连接电容c9的另一端,光耦phc1内部二极管的阴极连接光耦pch1内部二极管的阳极,光耦pch1内部二极管的阴极连接三极管tr2的集电极,三极管tr2的基极连接电阻r20和电阻r21,电阻r20的另一端连接二极管d8的阴极,电阻r21的另一端连接三极管tr2的发射极,光耦phc1内部光敏三极管的发射极通过电阻r11连接电阻r12、电容c6和三极管tr1的基极,光耦pch1内部光敏三极管的集电极通过电阻r18连接电阻r19、电容c7和三极管tr3的基极。
8、作为本实用新型的进一步技术方案:所述三极管tr1和三极管tr2为npn三极管,三极管tr3为pnp三极管。
9、作为本实用新型的进一步技术方案:所述控制电路二包括三极管tr4和三极管tr5,三极管tr4的发射极连接电阻r23,三极管tr4的基极连接电阻r23的另一端和电阻r25,电阻r25的另一端连接二极管d9的阳极、二极管zd1的阳极和led2的阴极,二极管d9的阴极连接电阻r22、电阻r24、电容c10和电阻r26,电阻r26的另一端连接led2的阳极,三极管tr5的集电极连接二极管d11的阳极,三极管tr5的基极连接电容c11、电阻r28和电阻r29,电阻r28的另一端连接二极管d10的阴极,三极管tr5的集电极连接二极管d13的阳极、电容c11的另一端和电阻r29的另一端。
10、作为本实用新型的进一步技术方案:所述三极管tr4的pnp三极管,三极管tr3为npn三极管。
11、作为本实用新型的进一步技术方案:所述延时电路采用ne555计时器芯片。
12、与现有技术相比,本实用新型的有益效果是:本实用新型通过多个继电器与电路组合,使之互补彼此可能的异常缺陷,达到正确动作和降低失误及失效的可能性,提高电气系统的安全。
技术特征:
1.一种用于工业机器人的安全控制电路,包括电源电路、安全型继电器电路、接口电路、控制电路和延时电路,其特征在于,所述控制电路包括控制电路一和控制电路二,电源电路分别连接安全型继电器电路、接口电路和延时电路,安全型继电器电路还分别连接控制电路一和控制电路二;
2.根据权利要求1所述的一种用于工业机器人的安全控制电路,其特征在于,所述三极管tr1和三极管tr2为npn三极管,三极管tr3为pnp三极管。
3.根据权利要求1所述的一种用于工业机器人的安全控制电路,其特征在于,所述三极管tr4的pnp三极管,三极管tr3为npn三极管。
4.根据权利要求1所述的一种用于工业机器人的安全控制电路,其特征在于,所述延时电路采用ne555计时器芯片。
技术总结
本技术公开了一种用于工业机器人的安全控制电路,属于工业机器人领域,包括电源电路、安全型继电器电路、接口电路、控制电路和延时电路,所述控制电路包括控制电路一和控制电路二,电源电路分别连接安全型继电器电路、接口电路和延时电路,安全型继电器电路还分别连接控制电路一和控制电路二,本技术通过多个继电器与电路组合,使之互补彼此可能的异常缺陷,达到正确动作和降低失误及失效的可能性,提高电气系统的安全。
技术研发人员:刘明远
受保护的技术使用者:烟台艾创机器人科技有限公司
技术研发日:20230411
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!