无人船声纳巡航探测系统
本技术涉及无人船声纳巡航探测,尤其涉及一种无人船声纳巡航探测系统。
背景技术:
1、随着养殖业的发展和海珍品养殖的兴起,对养殖场安全监测的需求越来越迫切。然而,传统的监测方法在水下环境中面临着一些挑战,如水下情况的复杂性、探测范围的限制以及数据传输和处理的困难。因此,需要一种创新的技术方案来解决这些问题,提高养殖场的安全性和监测效率,传统的探测方式确实主要集中在水面情况的监测,如红外监控等。而对于水下情况的监测,通常需要采用特定的设备和方法来实现。在水下情况的监测中,声呐技术被广泛应用。传统的声呐监测方式包括将声呐装置固定在特定位置,或者搭载在渔船等移动平台上与人工配合进行监测。这些方法在一定程度上能够实现水下情况的监测,但存在一些局限性。首先,将声呐装置固定在特定位置可能受限于水下环境的复杂性和不可预测性。水流、水质和水温等因素可能导致声波的传播和反射发生变化,从而影响监测结果的准确性。其次,搭载声呐设备的移动平台如渔船需要人工配合进行监测,操作复杂且受限于人工的经验和技能水平。此外,移动平台的运动可能会引起声波信号的扩散和变形,影响监测范围和准确性。
2、公告为cn114879202 a的专利文件中公开了一种基于束波形成技术的水下监控装置及方法,属于声呐探测技术领域,该方法包括主控台和两个蛙人探测声呐。主控台是系统的核心控制单元,包括处理器、存储器、通信模块、电源模块和报警模块。蛙人探测声呐布设于港口两侧水下岸壁,并与主控台进行双向通信。每个蛙人探测声呐由发射换能器、接收换能器、控制模块、存储模块、通信模块和电源模块组成。蛙人探测声呐还包括蛙人识别单元和红外识别单元。蛙人识别单元由第一识别模块、计算模块、第二识别模块和目标样本库组成,用于对待测水下目标进行准确的识别和分类。红外识别单元包括红外摄像头和图像识别模块,用于捕捉水下目标的红外图像并进行处理和分析。这些模块之间通过双向通信实现数据传输和指令控制,主控台作为核心控制单元协调各个模块的工作。整个系统能够全面监控港口附近水域,并准确地识别待测水下目标的类型。
3、现有技术中,搭载声呐设备的移动平台如渔船需要人工配合进行监测,操作复杂且受限于人工的经验和技能水平,此外,移动平台的运动可能会引起声波信号的扩散和变形,影响监测范围和准确性,为此我们提出了一种无人船声纳巡航探测系统用于解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在搭载声呐设备的移动平台如渔船需要人工配合进行监测,操作复杂且受限于人工的经验和技能水平,此外,移动平台的运动可能会引起声波信号的扩散和变形,影响监测范围和准确性的缺点,而提出的一种无人船声纳巡航探测系统。
2、为了实现上述目的,本实用新型采用了如下技术方案:
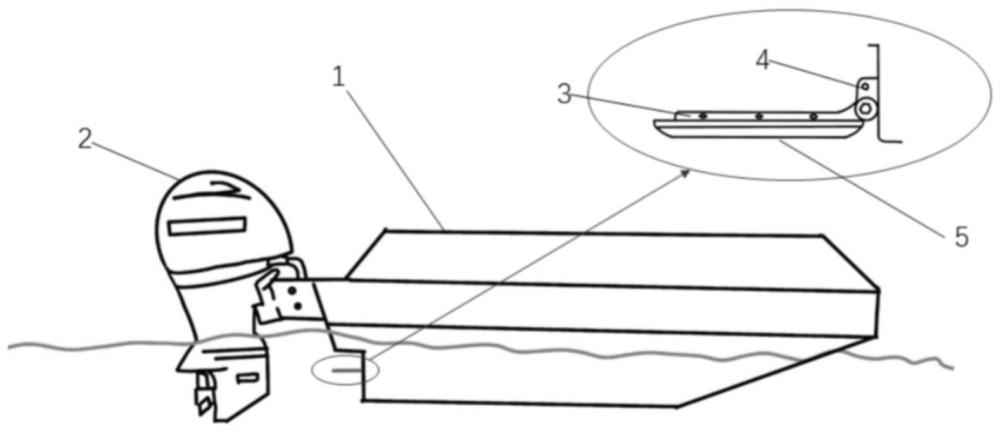
3、一种无人船声纳巡航探测系统,包括无人船,所述无人船包括船体,船体上连接有无人船引擎,船体上连接有托架安装板,托架安装板上连接有船尾肋板安装板,船尾肋板安装板上连接有换能器,所述无人船连接有第一存储模块、第一控制模块、第一通信模块、第一电源模块、导航模块和清理模块,无人船连接有声呐、中央处理器。
4、优选的,所述声呐连接有接收换能器、发射换能器、第二控制模块、第二通信模块、第二电源模块和第二存储模块。
5、优选的,所述中央处理器连接有第一数据处理和分析单元、第三通信模块、声呐控制单元和无人船控制单元。
6、优选的,所述无人船控制单元连接有数据接收和存储单元、第二数据处理和分析单元和结果展示和报警单元。
7、优选的,所述清理模块包括定时单元、控制单元和清理单元,所述定时单元与控制单元连接,所述控制单元和清理单元连接。
8、本实用新型中,所述一种无人船声纳巡航探测系统的有益效果:
9、1、本方案通过无人船的设置,具有自主巡航的能力,可以在养殖场内自由移动并覆盖更大范围的区域,无人船搭载声呐可以在不同位置和角度进行巡航,从而实现对更广泛区域的探测,这有助于提高水下目标的发现和监测效率。
10、2、本方案结合移动终端和中央处理单元,实现与无人船的实时连接。这样,用户可以通过移动终端随时监控养殖场的安全状态,而无需人工干预。通过远程监测和自动化控制,提高操作的便利性和效率,搭载声呐的无人船可以实时返回探测到异常的位置,具有目标定位等功能。
11、本实用新型能够具有自主巡航的能力,具有较长的巡航时间,能够实现长时间、大范围的水下情况监测,提高养殖场的安全性和监测效率,结构简单,使用方便。
技术特征:
1.一种无人船声纳巡航探测系统,包括无人船,其特征在于,所述无人船包括船体(1),船体(1)上连接有无人船引擎(2),船体(1)上连接有托架安装板(4),托架安装板(4)上连接有船尾肋板安装板(3),船尾肋板安装板(3)上连接有换能器(5),所述无人船连接有第一存储模块、第一控制模块、第一通信模块、第一电源模块、导航模块和清理模块,无人船连接有声呐、中央处理器。
2.根据权利要求1所述的无人船声纳巡航探测系统,其特征在于,所述声呐连接有接收换能器、发射换能器、第二控制模块、第二通信模块、第二电源模块和第二存储模块。
3.根据权利要求2所述的无人船声纳巡航探测系统,其特征在于,所述中央处理器连接有第一数据处理和分析单元、第三通信模块、声呐控制单元和无人船控制单元。
4.根据权利要求3所述的无人船声纳巡航探测系统,其特征在于,所述无人船控制单元连接有数据接收和存储单元、第二数据处理和分析单元和结果展示和报警单元。
5.根据权利要求4所述的无人船声纳巡航探测系统,其特征在于,所述清理模块包括定时单元、控制单元和清理单元,所述定时单元与控制单元连接,所述控制单元和清理单元连接。
技术总结
本技术属于无人船声纳巡航探测领域,尤其是一种无人船声纳巡航探测系统,针对现有的搭载声呐设备的移动平台如渔船需要人工配合进行监测,操作复杂且受限于人工的经验和技能水平,此外,移动平台的运动可能会引起声波信号的扩散和变形,影响监测范围和准确性的问题,现提出如下方案,其包括无人船,所述无人船包括船体,船体上连接有无人船引擎,船体上连接有托架安装板,托架安装板上连接有船尾肋板安装板,船尾肋板安装板上连接有换能器,本技术能够具有自主巡航的能力,具有较长的巡航时间,能够实现长时间、大范围的水下情况监测,提高养殖场的安全性和监测效率,结构简单,使用方便。
技术研发人员:赵峰,郝晋玉,邓富文,王庆祝
受保护的技术使用者:山东工商学院
技术研发日:20230830
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!