用于自主车辆的轨迹规划的基于数据驱动的预测的系统和方法与流程
本专利文件总体上涉及用于轨迹规划的工具(系统、装置、方法、计算机程序产品等)、车辆控制系统和自主驾驶系统,更具体地涉及,但不限于,用于自主车辆的轨迹规划的基于数据驱动的预测的系统和方法。
背景技术:
1、自主车辆通常被配置和控制为遵循基于计算的行驶路径的轨迹。然而,当诸如障碍物的变量存在于行驶路径上时,自主车辆必须执行控制操作,使得可以通过实时改变行驶路径以避开障碍物来安全地驾驶车辆。
2、在相关技术中,通过将行驶路径的空间信息(例如坐标、方向角、曲率等)表示为移动距离的多项式或数学函数来确定自主车辆控制操作,以避免静态障碍物。然而,当在行驶路径上存在动态障碍物时,根据相关技术的自主车辆可能无法准确地预测车辆是否将与动态障碍物碰撞。具体地,相关技术没有考虑自主车辆和其他动态车辆之间的相互作用。因此,传统的自主车辆控制系统不能准确地预测其他邻近动态车辆的未来位置。因此,不能实现传统自主车辆的最佳性能。例如,邻近的动态障碍物的非预期行为可能导致与传统自主车辆的碰撞。
技术实现思路
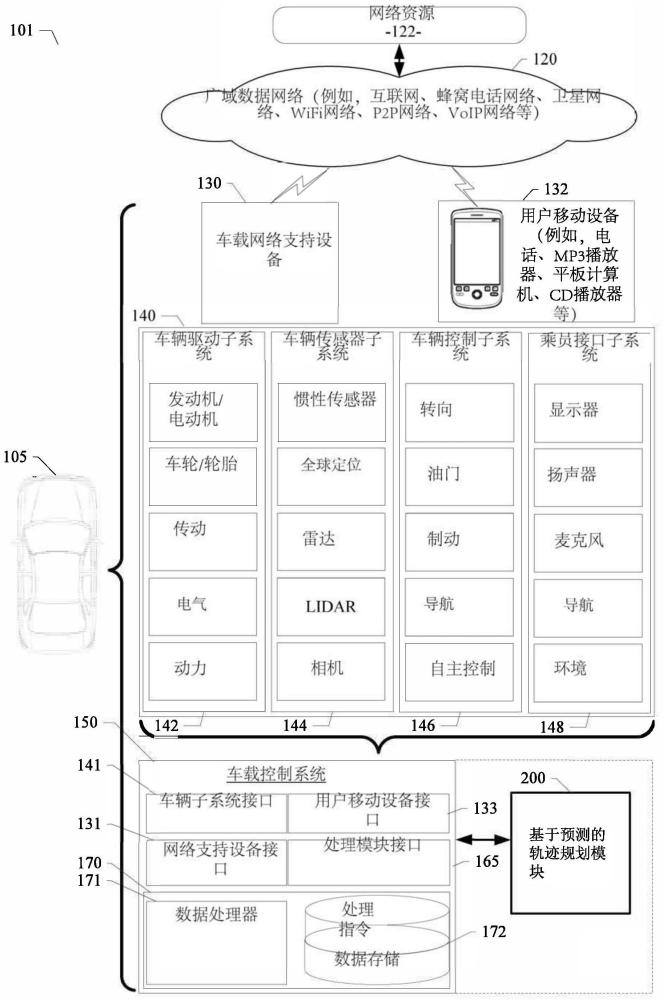
1、本文公开了用于提供自主车辆的轨迹规划的系统和方法。具体地,本公开总体涉及使用基于数据驱动的预测的方法进行自主车辆的轨迹规划。一方面,本文的系统可以包括被配置为收集数据的各种传感器、计算设备以及用于预测在自主车辆附近的其他车辆和/或动态对象的轨迹的预测模块。最初,计算设备生成轨迹选项,而预测模块使用分别与每个车辆和/或动态对象的可能轨迹有关的数据来预测所检查的车辆和/或动态对象的反应。可以将与预测的反应相对应的数据发送到计算设备,以完善最初建议的轨迹选项。计算设备随后可以指示预测模块进一步收集数据并进行预测以完成轨迹规划过程。
技术特征:
1.一种轨迹规划系统,包括:
2.根据权利要求1所述的系统,其中所述预测结果轨迹的第一分布被生成以预测邻近车辆的行为和轨迹。
3.根据权利要求2所述的系统,其中所述预测模块使用人类驾驶行为数据通过机器学习来训练。
4.根据权利要求1所述的系统,其中所述预测结果轨迹的第一分布基于对应于所述邻近主体的输入对象数据和所述第一建议轨迹,其中所述第一分布中的每个第一分布的所述预测结果轨迹具有相关联的置信度水平。
5.根据权利要求4所述的系统,其中所述轨迹规划模块被配置成使用所述预测模块生成针对所述邻近主体中的每个邻近主体的预测结果轨迹的所述更新的第一分布,其中所述预测结果轨迹的所述更新的第一分布基于对应于所述邻近主体的所述输入对象数据和所述第二建议轨迹,其中所述更新的第一分布的预测结果轨迹具有相关联的置信度水平。
6.根据权利要求5所述的系统,其中所述轨迹规划模块被配置成重复地生成预测结果轨迹的分布和相关联的置信度水平,直到对应于所述建议轨迹的所述得分处于或高于所述最小可接受阈值为止,或者直到超过时间段或迭代计数为止。
7.根据权利要求1所述的系统,其中所述轨迹规划模块被配置成当对应于所述建议轨迹的所述得分处于或高于所述最小可接受阈值时,输出针对所述自主车辆的建议轨迹。
8.根据权利要求1所述的系统,其中所述轨迹规划模块被配置成根据所述邻近主体的所述预测结果轨迹来输出针对所述自主车辆的建议轨迹。
9.根据权利要求1所述的系统,其中所述轨迹规划模块和所述预测模块形成反馈回路。
10.一种轨迹规划方法,包括:
11.根据权利要求10所述的方法,包括基于人类驾驶行为数据的输入创建用于训练所述预测模块的轨迹。
12.根据权利要求10所述的方法,包括使所述预测模块将对应于邻近主体的预测轨迹的信息保持为多项式表达式或数据表示。
13.根据权利要求10所述的方法,包括使用对应于人类驾驶行为的现实世界数据用机器学习来训练所述预测模块。
14.根据权利要求13所述的方法,其中使用损失函数来检查和校正训练结果。
15.一种非暂态机器可用存储介质,包含指令,所述指令在由数据处理器执行时使所述数据处理器:
16.根据权利要求15所述的非暂态机器可用存储介质,其中,所述指令还被配置成:使用一个或多个车辆传感器子系统来生成与在所述自主车辆附近检测到的对象相关的输入对象数据,所述输入对象数据包括对应于所述邻近主体的速度和轨迹数据,其中所述邻近主体能够由所述车辆传感器子系统检测。
17.根据权利要求16所述的非暂态机器可用存储介质,其中所述车辆传感器子系统中的每个车辆传感器子系统包括惯性测量单元imu、全球定位系统gps收发器、雷达、激光测距仪和一个或多个相机中的至少一项。
18.根据权利要求16所述的非暂态机器可用存储介质,其中所述车辆传感器子系统中的每个车辆传感器子系统包括o2监测器、燃料表和发动机油温中的至少一项。
19.根据权利要求16所述的非暂态机器可用存储介质,其中所述车辆传感器子系统中的每个车辆传感器子系统包括多个传感器,其中所述多个传感器被单独地或共同地致动。
20.根据权利要求15所述的非暂态机器可用存储介质,其中所述最小可接受阈值是具有因子的预定义得分,其中所述因子包括所述自主车辆的转弯速率、加速度、停止速率和速度,其中所述因子还包括所述自主车辆与其他车辆之间的间距。
技术总结
公开了用于自主车辆的轨迹规划的基于数据驱动的预测的系统和方法。具体实施例包括:生成针对自主车辆的第一建议轨迹;使用预测模块生成邻近主体的预测结果轨迹;基于邻近主体的预测结果轨迹对第一建议轨迹进行评分;如果第一建议轨迹的分数低于最小可接受阈值,则生成针对自主车辆的第二建议轨迹,并生成邻近主体的相对应预测结果轨迹;以及输出针对自主车辆的建议轨迹,其中与建议轨迹相对应的分数等于或高于最小可接受阈值。
技术研发人员:孙行,林於菟,刘浏,马凯杰,禤子杰,赵宇飞
受保护的技术使用者:图森有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!